CIP-2021 : G01S 5/16 : que utilizan ondas electromagnéticas que no sean ondas de radio.
CIP-2021 › G › G01 › G01S › G01S 5/00 › G01S 5/16[1] › que utilizan ondas electromagnéticas que no sean ondas de radio.
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
G01S 5/16 · que utilizan ondas electromagnéticas que no sean ondas de radio.
CIP2021: Invenciones publicadas en esta sección.
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino.
(29/07/2020) Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o varios sensores de luz (6 a 8), caracterizado por que están previstos un elemento de preamplificación , un elemento detector sensible a la fase y un elemento de control central , por que se comprueba una señal suministrada por el sensor de luz (6 a 8) en cuanto a un patrón de señal prefijado por el elemento de control central y por que se relaciona esta señal, a efectos de realizar un control del aparato , con la orientación del respectivo sensor de luz (6 a 8), en caso de que estén dispuestos varios sensores de luz (6 a 8), o con la orientación…
Sistema de detección de localización de fuente de luz.
(06/05/2020) Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema:
un dispositivo de emisión de luz situado con respecto a un segundo objeto en una posición predeterminada fija;
un sensor , que tiene una matriz cuadrada de fotodetectores de dos por dos , que está configurada para recibir la luz incidente emitida por el dispositivo de emisión de luz , estando la matriz cuadrada de fotodetectores de dos por dos montada en el primer objeto ; y
un procesador acoplado a la matriz cuadrada de fotodetectores de dos por dos , estando el procesador configurado para determinar la orientación del primer objeto con respecto al segundo objeto , basándose en un ángulo de la luz incidente detectada por la matriz cuadrada de fotodetectores de dos por dos ,…
Procedimiento y dispositivo para determinar la distancia entre un receptor aéreo y un emisor terrestre fijo.
(19/06/2019) Procedimiento para la determinación continua de la distancia entre un receptor aéreo (R) móvil de manera conocida en una trayectoria conocida (T) y un emisor terrestre fijo (E), siendo dicho emisor observado por dicho receptor según una línea de visión (LVi) de dirección variable al desplazamiento de dicho emisor,
caracterizado por que implementa las siguientes operaciones:
a') mediante la implementación de un modelo digital de terreno (MNT) que es representativo del terreno en el que se encuentra dicho emisor fijo (E) y que indica la altura máxima (Hmax) y la altura mínima (Hmin) de ese terreno, determinar, para cada posición de una pluralidad de posiciones sucesivas de dicho receptor aéreo (R) a lo largo de su trayectoria (T), un valor de distancia máxima (dimax) y un valor de distancia…
SISTEMA INFO-OPTICO PARA LA MONITORIZACIÓN DEL MOVIMIENTO DE ROEDORES DE LABORATORIO.
(10/01/2019) Sistema info-óptico para la monitorización del movimiento de roedores de laboratorio. La presente invención consiste en un sistema info-óptico diseñado para monitorizar los movimientos de roedoresde laboratorio en experimentos llevados a cabo en laberintos como Open-field, T-Maze y Morriswater Mazey en ruedas de entrenamiento del tipo voluntario o motorizadas. El sistema localiza, sigue y registra la trayectoria descrita a lo largo del tiempo por uno o varios focos de luz infrarroja fijados a la piel del animal de laboratorio; esto permite la determinación de un conjunto de variables como: tiempo de movimiento, tiempo de inacción, frecuencia en distintas zonas del recinto, forma de la trayectoria, longitud de la trayectoria recorrida, velocidad instantánea, velocidad media, velocidad máxima, aceleración y otras magnitudes físicas…
SISTEMA DE POSICIONAMIENTO.
(10/01/2019) Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente distribuidos y una serie de unidades de rastreo , asociadas a cada jugador o usuario, de manera que los módulos espaciales están constituidos a partir de un panel de forma cuadrada, en la que se integran dos agrupaciones de diodos LED de diferente tipo, LEDs de referencia de espectro visible, y LEDs de identificación infrarrojos, incluyendo cada módulo espacial con medios de configuración para sus diodos de identificación así como medios de alimentación…
Sistema de navegación de campo próximo.
(31/10/2018) Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
- comprendiendo dicho primer objeto en movimiento un segmento de usuario de dicho sistema de navegación de campo próximo que tiene más de un receptor (40, 40', 40"), más de una antena de usuario montada en una estructura de usuario de dicho primer objeto, y una unidad de procesamiento conectada a dichos receptores (40, 40', 40"), en el que cada antena de usuario está conectada a un receptor asociado (40, 40', 40");
- comprendiendo dicho segundo objeto un segmento de base de dicho sistema de navegación de campo próximo que tiene al menos cuatro transmisores y al menos cuatro antenas de base , en el que cada transmisor está…
Medición óptica de hilo aéreo.
(27/09/2018) Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el objeto de los pares (10a, 10b) de cámaras estereoscópicas primero y segundo que están situados en un plano (P) de visión común;
teniendo el primer par (10a) de cámaras estereoscópicas una primera cámara y una segunda cámara (C1, C2) ubicadas adyacentes entre sí, y teniendo el segundo par (10b) de cámaras estereoscópicas una tercera cámara y una cuarta cámara (C3, C4) ubicadas adyacentes entre sí, estando el primer par (10a) de cámaras estereoscópicas espaciado con respecto al segundo par (10b) de cámaras estereoscópicas; caracterizado porque la ubicación es una ubicación en un espacio tridimensional y los uno o más objetos son…
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS.
(27/06/2018). Solicitante/s: SKYLIFE ENGINEERING, S.L. Inventor/es: BERNAL MÉNDEZ,Joaquín, RODRIGUEZ VAZQUEZ,Antonio Leopoldo, LUJAMBIO GENUA,Aintzane, PARRILLA CASQUET,Luis Miguel, FREIRE ROSALES,Manuel, MARTIN PRATS,Maria Angeles, RODRIGUEZ LOPEZ,Pilar.
Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales GNSS no es posible o la cobertura de la misma no es suficiente, y compuesto de una red de balizado (balizas, ubicadas y orientadas), al menos un equipo receptor, y un sistema de comunicación inter-balizas, para la auto-configuración del sistema, con objeto de determinar la posición de cada una de las balizas que integran la red de balizado, mediante el empleo de campos magnéticos de frecuencia extremadamente baja (ELF), y un método de control de acceso múltiple al medio por división en frecuencia (FDMA).
PDF original: ES-2674123_A1.pdf
Método para medir perfiles de superficie en celdas de electrólisis de aluminio en funcionamiento.
(23/05/2018). Solicitante/s: SGL CFL CE GmbH. Inventor/es: PACHARZYNA,RAFAL, ORACZ,TOMASZ.
Aparato para determinar perfiles de superficie, en particular el perfil de desgaste del cátodo y el perfil del reborde lateral, o de los rebordes laterales, de una celda de electrólisis de aluminio, que está llena de una masa fundida de aluminio y que tiene reborde(s) lateral(es) (6a), que comprende
- un sistema de determinación de la posición con un miembro de sistema móvil y un miembro de sistema fijo y
- una lanza con una punta de lanza resistente al calor para su inmersión en la masa fundida o en el reborde lateral (6a) de la celda,
estando fijado el miembro móvil a la lanza y estando adaptado el miembro fijo para la determinación de una posición de la punta de lanza por medio de la determinación de una posición del miembro móvil.
PDF original: ES-2680144_T3.pdf
Sistema de control de navegación para un dispositivo robótico.
(28/03/2018) Un dispositivo robótico de limpieza que comprende:
un chasis y un armazón externo asegurado al chasis que define una cubierta estructural de una altura que facilita el movimiento del dispositivo robótico de limpieza por debajo de los muebles;
unos conjuntos izquierdo y derecho de ruedas motrices principales (112L, 112R) y unos motores eléctricos independientes (114L, 114R) respectivos, montados de manera independiente en combinación con el chasis que se desplaza con el pivotamiento permitido, para un movimiento pivotante con respecto a este en extremos opuestos del diámetro transversal del chasis , y que se puede mover entre una posición retraída, sometida al peso del dispositivo robótico de limpieza durante su funcionamiento, y una posición extendida, donde…
SISTEMA DE POSICIONAMIENTO.
(04/01/2018) Sistema de posicionamiento.
Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente distribuidos y una serie de unidades de rastreo , asociadas a cada jugador o usuario, de manera que los módulos espaciales están constituidos a partir de un panel de forma cuadrada, en la que se integran dos agrupaciones de diodos LED de diferente tipo, LEDs de referencia de espectro visible, y LEDs de identificación infrarrojos, incluyendo cada módulo espacial con medios de configuración para sus diodos de identificación así como medios de alimentación o conexión a una fuente de alimentación. Paralelamente, las unidades de rastreo incorporan una serie de cámaras con distintas orientaciones, asociadas a una unidad de procesamiento de imágenes , contando…
Técnicas para posicionar un vehículo.
(08/11/2017) Un sistema para determinar una ubicación (x_v, y_v) de un vehículo en un entorno provisto de una pluralidad de puntos de referencia (11, 11') cuya ubicación (x_b, y_b) es conocida, comprendiendo el sistema:
- al menos un sensor de distancia de exploración instalado en el vehículo y configurado para medir la distancia (R_c) y la dirección (a_c) desde el vehículo a al menos dos de la pluralidad de puntos de referencia (11, 11');
- un dispositivo de procesamiento de datos configurado para:
- almacenar en memoria la ubicación (x_b, y_b) de dichos al menos dos puntos de referencia;
- determinar una ubicación inicial…
Métodos y aparatos para determinar una posición utilizando fuentes de luz.
(20/09/2017) Un método, que comprende:
procesar, a través de un circuito lógico que comprende una pluralidad de extractores de código, una salida de un fotodetector en base a códigos anticipados para identificar múltiples fuentes de luz desde las cuales el fotodetector recibe luz en una primera posición;
determinar, utilizando el circuito lógico, ubicaciones de las fuentes de luz identificadas;
determinar, utilizando el circuito lógico, las distancias desde cada una de las fuentes de luz identificadas al fotodetector;
determinar una ubicación de la primera posición basándose en las ubicaciones de las fuentes de luz identificadas…
Sistema de metrología óptica proyectiva.
(02/08/2017) Un sistema de metrología óptica proyectiva que comprende una primera unidad óptica y una segunda unidad óptica , comprendiendo la primera unidad óptica :
- una entrada óptica configurada para recibir una primera señal luminosa; y
- un objetivo luminoso diseñado para emitir una segunda señal luminosa y formado por una serie de elementos luminosos ;
y en el que la segunda unidad óptica comprende:
- una fuente de luz diseñada para generar dicha primera señal luminosa;
- un sensor optoelectrónico diseñado para recibir dicha segunda señal luminosa, de manera que dicha segunda señal luminosa forme una imagen del objetivo luminoso sobre dicho sensor optoelectrónico;…
Sistema y procedimiento para averiguar una posición de un objeto móvil, disposición de ledes de iluminación general y sensor de luz para una averiguación de posición de un objeto móvil.
(28/09/2016) Sistema para averiguar una posición de un objeto móvil , con las siguientes características:
una disposición de al menos tres ledes de iluminación general (L1-L3) con las siguientes características:
un primer led de iluminación general (L1), que está configurado para emitir una primera señal de luz (S1), que presenta una primera información de tiempo de emisión (T1S) y una primera información de emisor en una primera gama de longitud de onda, en el que la primera información de emisor posibilita al menos una determinación de una posición (P1) del primer led de iluminación general (L1), y la primera información de tiempo de emisión (T1S) es una información sobre un momento, en el que se emitió la primera señal (S1); un segundo led de iluminación…
Aparato de mano y procedimiento para controlar y/o programar un manipulador.
(25/05/2016). Solicitante/s: KUKA ROBOTER GMBH. Inventor/es: SEDLMAYR,ANDREAS.
Aparato de mano portátil para controlar y/o programar un manipulador, especialmente un robot, con un dispositivo de manipulación para la manipulación del aparato de mano por un usuario;
un elemento palpador en el que está definido un punto de referencia (R);
un dispositivo de registro de posición , unido al elemento palpador, especialmente de forma separable, para registrar una posición (x, y, z, α, β, γ) del punto de referencia;
caracterizado por que
el dispositivo de manipulación y el dispositivo de registro de posición están unidos entre sí de forma articulada, y
el aparato de mano presenta un dispositivo de registro de fuerza para registrar una fuerza de reacción (F) que actúa sobre el elemento palpador.
PDF original: ES-2580833_T3.pdf
Método y sistema para determinar una posición relativa con respecto a un objetivo.
(20/04/2016) Método para determinar la dirección angular relativa θ entre un objetivo y un transmisor , comprendiendo el método las siguientes etapas:
- producir uno o más haces de luz ,
- transmitir mediante el transmisor tales uno o más haces de luz , en el que un haz de luz indica una dirección angular relativa desde el transmisor ,
- recibir, por el objetivo , uno o más de los haces de luz ,
en el que la generación del uno o más haces de luz comprende difractar luz de banda ancha de tal manera que longitudes de onda de frecuencia óptica diferentes se difractan de manera diferente y se detecta una dirección…
Generación de mapa de campo magnético para posicionamiento en interiores.
(30/03/2016) Un aparato para generar un mapa de campo magnético de interior para un edificio , que comprende al menos un procesador y al menos una memoria que incluye un código de programa informático, donde la al menos una memoria y el código de programa informático están configurados para, con el al menos un procesador , hacer que el aparato al menos: obtenga información que indica un vector de campo magnético medido en al menos una ubicación conocida dentro del edificio , donde el vector de campo magnético medido representa magnitud y dirección del campo magnético terrestre afectado por las estructuras locales del edificio , y en el cual la al menos una ubicación conocida está definida en un sistema de referencia de un plano de planta del…
(28/03/2016). Solicitante/s: UNIVERSIDAD DE LEON. Inventor/es: GONZALO DE GRADO, JESUS, DOMÍNGUEZ FERNÁNDEZ,Diego.
Un dispositivo inhibidor conectado a sensores ópticos de vigilancia de una zona objeto de protección, estando conectados a través de una red local a una unidad procesadora para calcular la trayectoria de un dispositivo aéreo no tripulado UAV y comandar órdenes hacia una unidad inhibidora que emite señales inhibidoras hacia el vehículo UAV con el objeto de interferir en el normal funcionamiento de un sistema de visión incluido en el vehículo , sin ocasionar físico en los mismos ni en el propio vehículo UAV.
PDF original: ES-2564741_A1.pdf
PDF original: ES-2564741_B1.pdf
Sistema de metrología óptica proyectiva gruesa y fina.
(10/02/2016) Un sistema de metrología óptica proyectiva que comprende:
- un objetivo luminoso formado por un primer número de fuentes de luz (4a-4c) que tienen una disposición espacial preestablecida;
- una unidad óptica que comprende un sensor de imagen optoelectrónico que comprende una superficie de detección (A), estando configurada la unidad óptica para recibir una señal luminosa (R1, R2) que procede de dicho objetivo luminoso y para la definir dos trayectorias ópticas diferentes para la señal luminosa hacia dicho sensor de imagen optoelectrónico; y
- una unidad de procesamiento electrónico conectada al sensor de imagen optoelectrónico;
caracterizado por que las…
Sistema de metrología óptica proyectiva para determinar actitud y posición.
(30/12/2015) Un sistema de metrología óptica proyectiva que comprende:
- un objetivo luminoso que comprende una pluralidad de fuentes de luz (4a a 4c) con una disposición espacial prefijada;
- un sensor de imágenes opto-electrónico ;
- una unidad óptica configurada para recibir una señal lumínica (R1, R2) procedente del objetivo luminoso y para definir dos trayectos ópticos distintos para la señal lumínica hacia el sensor de imágenes opto-electrónico, siendo los dos trayectos ópticos tales como para provocar la formación simultánea en el sensor de imágenes opto-electrónico de al menos dos imágenes (I1, I2) del objetivo luminoso;
en el que la unidad…
Sistema de medición multidimensional.
(15/04/2015) Un sistema de medición multidimensional que comprende:
una unidad de seguimiento que emite luz láser y lleva a cabo un seguimiento usando coordenadas esféricas;
un blanco en comunicación con la unidad de seguimiento , siendo el blanco capaz de hacer movimientos de inclinación, oscilación y balanceo;
un módulo de determinación de distancia que determina una distancia entre la unidad de seguimiento y el blanco ;
un módulo de salida que envía información de posición relativa al blanco respecto a la unidad de seguimiento en función de las coordenadas esféricas, los movimientos de inclinación, oscilación y balanceo…
Procedimiento para la determinación de la posición de un aparato desplazable automáticamente.
(01/04/2015) Procedimiento para la determinación de la posición de un aparato desplazable automáticamente, en particular aparato acumulador de polvo del suelo desplazable automáticamente, con ruedas de desplazamiento accionadas con preferencia con motor eléctrico, en el que el aparato está provisto con una unidad de reconocimiento de obstáculos (A), que está constituida por unidades ópticas de emisión y de recepción, en el que, además, se calculan una pluralidad de posiciones y de alineaciones posibles a partir de una primera supuesta posición del aparato , previamente calculada, una posición y/o una alineación posibles del aparato se designan en este caso también como partículas, y después de un desplazamiento correspondiente del…
Determinación de la posición y de la orientación.
(19/11/2014) Aparato para determinar una disposición relativa de un primer objeto y un segundo objeto , que comprende:
medios de detección en el segundo objeto para detectar un haz de radiación transmitida por una fuente láser desde el primer objeto , teniendo el haz de radiación un perfil de haz predeterminado
los medios de detección comprenden una pluralidad de detectores , proporcionándose cada detector en una posición diferente respectiva, conocida respecto al otro detector, de tal manera que en funcionamiento cada detector tiene una visión diferente de una fuente de la radiación en el primer objeto , estando cada detector configurado para producir una señal de detección correspondiente en respuesta a la radiación,
medios de procesamiento configurados para procesar las señales de detección juntas dependiendo de…
Sistema de seguimiento de objetos y de análisis de la situación.
(29/10/2014) Sistema de análisis de la situación para la detección y seguimiento de objetos móviles dentro de un espacio limitado a través de un periodo de tiempo predeterminable y para el análisis de constelaciones de objetos y episodios de tiempo así como situaciones durante el periodo de tiempo, con varias unidades de seguimiento, que presentan, respectivamente, al menos una subunidad en forma de una cámara, que está dispuesta y alineada de tal manera que puede detectar el espacio limitado y los objetos fijos y móviles que se encuentran en él, en el que las cámaras contienen, respectivamente, un objetivo y un sensor de detección de imágenes, y con una unidad central de procesamiento de datos de la posición, que está configurada para determinar para un objeto real respectivo una posición global…
Sistema para localización con precisión de un objetivo en tierra mediante una plataforma de vuelo y método de operación asociado.
(07/08/2013) Sistema de localización de objetivo configurado para determinar la posición de un objetivo en la tierra pormedio de una aeronave sin un dispositivo de telémetro láser, dicho sistema comprende una aeronave , porlo menos una cámara montada sobre dicha aeronave y dirigida de acuerdo con su propio eje de rastreo (A),medios de movimiento configurados para regular la posición espacial de dicha cámara con respecto a dichaaeronave de tal manera que dicho eje de rastreo (A) permanece dirigido sobre el objetivo durante el vuelo dela aeronave , medios de control para pilotear temporalmente la aeronave a lo largo de un segmento devuelo rectilíneo (TR) por encima del área…
Utilización de un sensor de imágenes y de un filtro de seguimiento de tiempo restante para evitar colisiones en vuelo.
(11/04/2013) Un sistema para evitar colisiones para decidir si se debe realizar una maniobra de evitación autónoma con elfin de evitar una colisión en vuelo entre un vehículo aéreo anfitrión equipado con el sistema y un vehículoaéreo intruso, comprendiendo el citado sistema :
- al menos un sensor electro - óptico [EO] dispuesto para capturar imágenes consecutivas del citadovehículo intruso, el vehículo que se manifiesta como un punto de objetivo en las citadas imágenes,
- un medio de tratamiento de imagen dispuesto para la estimar al menos el ángulo de acimut [φ] y de elevación [θ] desde el vehículo anfitrión al vehículo intruso en base a la posición en 2D del punto deobjetivo en la citadas imágenes, que se caracteriza porque el citado medio de tratamiento de imagen…
SISTEMA DE LOCALIZACION DE OBJETOS EN MOVIMIENTO.
(01/01/2004). Ver ilustración. Solicitante/s: CENTRO DE AUTOMATIZACION ROBOTICA Y TECNOLOGIAS DE LA FABRICACION (CARTIF). Inventor/es: PERAN GONZALEZ,JOSE RAMON, ZALAMA CASANOVA,EDUARDO, DOMINGUEZ QUIJADA,SALVADOR, GOMEZ GARCIA-BERMEJO,JAIME.
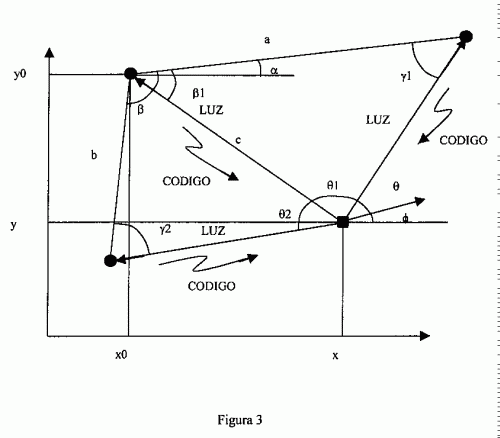
Sistema de localización de objetos en movimiento. El sistema objeto de la presente invención permite la localización de objetos, robots, vehículos, personas, etc en movimiento. Para ello una fuente de luz direccional sobre el elemento a localizar excita una serie de balizas dispuestas en su entorno en posiciones conocidas. Para ello cada baliza va provista de un sensor óptico capaz de detectar la incidencia del haz luminoso. Al tiempo que una baliza recibe la incidencia del haz láser, ésta emite un código binario por radiofrecuencia que permite al sistema identificar inequívocamente la baliza activada. A continuación se mide el ángulo relativo de incidencia del haz láser sobre las balizas activadas. Mediante un proceso trigonométrico de triangulación, y a partir del ángulo relativo medido entre las balizas activadas, se determina la posición y orientación del objeto en cuestión.
SISTEMA DE NAVEGACION PARA HELICOPTEROS.
(16/11/2003). Solicitante/s: SAFYAN, ANATOLII DIMITRIVICH SAFYAN, DIMITRII ANATOLIEVICH. Inventor/es: SAFYAN, DMITRY ANATOLIEVICH.
LA INVENCION SE REFIERE A UN SISTEMA DE NAVEGACION DE HELICOPTERO, ABARCANDO DOS CAMARAS MONTADAS A BORDO DEL HELICOPTERO. UNA CAMARA ESTA ORIENTADA HACIA ADELANTE MIRANDO HACIA AFUERA, DE FORMA QUE UNA SEGUNDA CAMARA ESTA DIRIGIDA HACIA ABAJO ESENCIALMENTE DE FORMA VERTICAL CON SU EJE OPTICO. SOBRE EL LUGAR DE TERRENO PREVISTO SE DISPONEN EN LAS PUNTAS DE UN TRIANGULO EQUILATERO BALIZAS DE DESTELLO EN EL CONTORNO DEL PUNTO DE TERRENO. LAS SEÑALES OPTICAS SUMINISTRADAS POR LA BALIZA DE DESTELLO SON RECEPCIONADAS POR LAS CAMARAS, DE TAL FORMA QUE A TRAVES DE UN CONMUTADOR Y UN BLOQUE DE SELECCION LAS CAMARAS SON ACTIVABLES EN DEPENDENCIA DE LA POSICION ALCANZADA DEL HELICOPTERO. UN BLOQUE DE CALCULO DE COORDENADAS ACTUA CON UN UNIDAD DE INDICACION O UN MONITOR DE FORMA CONJUNTA Y SIRVE PARA LA DETERMINACION DEL MOMENTO DE SUSPENSION PERMANENTE, DONDE SE DETERMINA ADICIONALMENTE LA VELOCIDAD DE ASCENSO Y ALTURA DEL HELICOPTERO Y SE TIENE EN CUENTA.
PROCEDIMIENTO PARA DETERMINAR LA SITUACION Y LA POSICION DE GIRO DE UN OBJETO.
(16/04/2003) Procedimiento para determinar la situación y la posición de giro de un objeto en el espacio tridimensional, utilizando una cabeza óptica de medición (9, 9a, 9b, 9c) con una óptica de reproducción , con un detector optoelectrónico con resolución local en dos dimensiones y con un dispositivo de valoración , de manera que la parte del objeto , que se encuentra en el campo de visibilidad de la óptica de reproducción se reproduce en el detector y es detectado en el mismo, y la información gráfica detectada es conducida hasta el dispositivo de valoración , caracterizado porque en el dispositivo de valoración se calcula la posición y el desarrollo de las estructuras del objeto reproducidas (2a; 2b) en el…
PROCEDIMIENTO PARA DETERMINAR LA POSICION DE OBJETOS EN UN EQUIPO CON EL FIN DE PRODUCIR UN CONJUNTO DE OBJETOS CON POSICIONES CONOCIDAS.
(01/03/2003). Ver ilustración. Solicitante/s: FAGER, JAN G. Inventor/es: FAGER, JAN G.
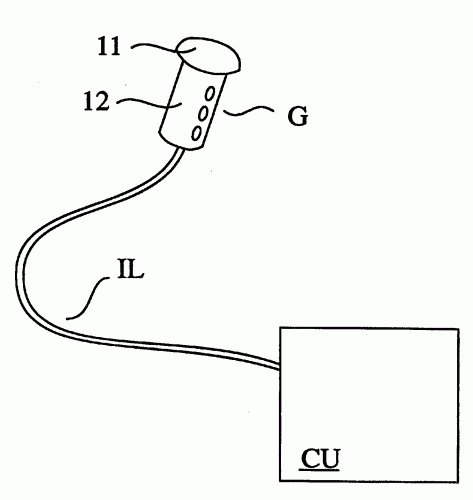
LA INVENCION SE REFIERE A UN EQUIPO QUE TIENE UN TRANSDUCTOR (G) QUE RECIBE UNAS SEÑALES DE UN NUMERO DE OBJETOS CON UNAS POSICIONES DESCONOCIDAS Y DETECTA LAS DIRECCIONES DESDE EL TRANSDUCTOR HASTA LOS OBJETOS. LAS DIRECCIONES DE LAS LINEAS DE VISTA HASTA LOS OBJETOS SON DETECTADAS, AL MENOS, EN DOS POSICIONES SEPARADAS DEL TRANSDUCTOR. LAS SEÑALES DEL TRANSDUCTOR SE SUMINISTRAN A UN MEDIO DE CALCULO (CU) QUE CALCULA LAS POSICIONES DE LOS OBJETOS.
SISTEMA DE MEDIDA PARA VERIFICAR LA POSICION REAL DE UN VEHICULO Y DISPOSITIVO DETECTOR PARA EL MISMO.
(01/03/2003) SE PRESENTA UN SISTEMA DE MEDICION PARA COMPROBAR LA POSICION DE UN VEHICULO , QUE COMPRENDE VARIAS BALIZAS OPTICAS (6 Y 7), UN DISPOSITIVO DETECTOR MONTADO EN EL VEHICULO PARA EMITIR UNA SEÑAL CUANDO SE DETECTA UNA BALIZA (6 O 7) Y UNA UNIDAD DE PROCESAMIENTO PARA CALCULAR, EMPEZANDO A PARTIR DE LA INFORMACION DEL DISPOSITIVO DE DETECCION , LA DESVIACION CON RESPECTO A LA POSICION DESEADA Y LA DIRECCION DE CONDUCCION DEL VEHICULO, QUE SE CARACTERIZA PORQUE EL DISPOSITIVO DETECTOR COMPRENDE DOS CAMARAS MONTADAS EN EL VEHICULO, UNA PRIMERA CAMARA QUE SE DIRIGE CASI HACIA LA DIRECCION DE CONDUCCION, Y UNA SEGUNDA CAMARA QUE SE DIRIGE HACIA UNA DIRECCION QUE SE LEVANTA VERTICAL SOBRE EL PLANO DONDE SE EXTIENDE LA TRAYECTORIA FORMADA…
{kind=link}
{kind=link}