CIP-2021 : G01S 1/70 : que utilizan ondas electromagnéticas que no sean ondas de radio.
CIP-2021 › G › G01 › G01S › G01S 1/00 › G01S 1/70[1] › que utilizan ondas electromagnéticas que no sean ondas de radio.
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 1/00 Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00).
G01S 1/70 · que utilizan ondas electromagnéticas que no sean ondas de radio.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS.
(27/06/2018). Solicitante/s: SKYLIFE ENGINEERING, S.L. Inventor/es: BERNAL MÉNDEZ,Joaquín, RODRIGUEZ VAZQUEZ,Antonio Leopoldo, LUJAMBIO GENUA,Aintzane, PARRILLA CASQUET,Luis Miguel, FREIRE ROSALES,Manuel, MARTIN PRATS,Maria Angeles, RODRIGUEZ LOPEZ,Pilar.
Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales GNSS no es posible o la cobertura de la misma no es suficiente, y compuesto de una red de balizado (balizas, ubicadas y orientadas), al menos un equipo receptor, y un sistema de comunicación inter-balizas, para la auto-configuración del sistema, con objeto de determinar la posición de cada una de las balizas que integran la red de balizado, mediante el empleo de campos magnéticos de frecuencia extremadamente baja (ELF), y un método de control de acceso múltiple al medio por división en frecuencia (FDMA).
PDF original: ES-2674123_A1.pdf
Métodos y aparatos para determinar una posición utilizando fuentes de luz.
(20/09/2017) Un método, que comprende:
procesar, a través de un circuito lógico que comprende una pluralidad de extractores de código, una salida de un fotodetector en base a códigos anticipados para identificar múltiples fuentes de luz desde las cuales el fotodetector recibe luz en una primera posición;
determinar, utilizando el circuito lógico, ubicaciones de las fuentes de luz identificadas;
determinar, utilizando el circuito lógico, las distancias desde cada una de las fuentes de luz identificadas al fotodetector;
determinar una ubicación de la primera posición basándose en las ubicaciones de las fuentes de luz identificadas…
Sistema y procedimiento para averiguar una posición de un objeto móvil, disposición de ledes de iluminación general y sensor de luz para una averiguación de posición de un objeto móvil.
(28/09/2016) Sistema para averiguar una posición de un objeto móvil , con las siguientes características:
una disposición de al menos tres ledes de iluminación general (L1-L3) con las siguientes características:
un primer led de iluminación general (L1), que está configurado para emitir una primera señal de luz (S1), que presenta una primera información de tiempo de emisión (T1S) y una primera información de emisor en una primera gama de longitud de onda, en el que la primera información de emisor posibilita al menos una determinación de una posición (P1) del primer led de iluminación general (L1), y la primera información de tiempo de emisión (T1S) es una información sobre un momento, en el que se emitió la primera señal (S1); un segundo led de iluminación…
Método y sistema para determinar una posición relativa con respecto a un objetivo.
(20/04/2016) Método para determinar la dirección angular relativa θ entre un objetivo y un transmisor , comprendiendo el método las siguientes etapas:
- producir uno o más haces de luz ,
- transmitir mediante el transmisor tales uno o más haces de luz , en el que un haz de luz indica una dirección angular relativa desde el transmisor ,
- recibir, por el objetivo , uno o más de los haces de luz ,
en el que la generación del uno o más haces de luz comprende difractar luz de banda ancha de tal manera que longitudes de onda de frecuencia óptica diferentes se difractan de manera diferente y se detecta una dirección…
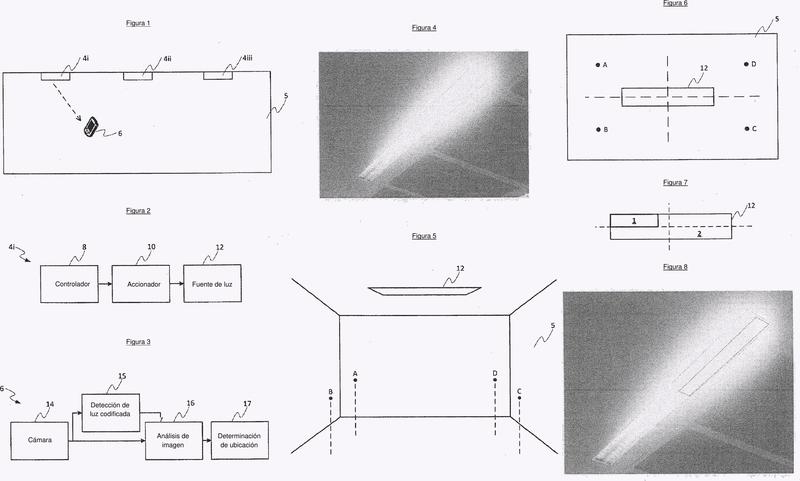
Determinación de distancia o posición.
(16/03/2016). Ver ilustración. Solicitante/s: Philips Lighting Holding B.V. Inventor/es: HOLTMAN,KOEN JOHANNA GUILLAUME.
Un dispositivo que comprende:
una entrada para recibir datos de imagen capturados por una cámara , comprendiendo los datos de imagen una imagen de una fuente de luz ;
un módulo de detección de luz codificada para detectar una señal de luz codificada, modulada en la luz de la fuente de luz, configurado para recuperar una o más dimensiones físicas de la fuente de luz en base a la señal de luz codificada procedente de dicha fuente de luz; y
un módulo de análisis de imágenes configurado para determinar una distancia de la cámara desde la fuente de luz, mediante la realización de un cálculo de perspectiva geométrica para comparar las una o más dimensiones físicas recuperados con una o más aparentes dimensiones de la imagen de la fuente de luz.
PDF original: ES-2608662_T3.pdf
Método de localización en espacios interiores basado en detección y emparejamiento de puntos de luz.
(26/05/2015) Método de localización en espacios interiores basado en detección y emparejamiento de puntos de luz que comprende obtener un mapa de puntos de luz de un recinto; detectar el movimiento de un usuario; detectar el paso bajo puntos de luz dispuestos en el recinto, mediante un sensor luminoso provisto en un dispositivo móvil; donde además el método comprende: establecer hipótesis de ubicación inicial del usuario con respecto al mapa de puntos de luz; actualizar las hipótesis de ubicación del usuario según la información relativa al movimiento del usuario y cada vez que se detecta un punto de luz; asignar una probabilidad a las hipótesis de ubicación,…
Método, sistema y producto informático para la orientación espacial de personas.
(21/05/2015) Método, un sistema y un producto informático para la orientación espacial de personas, aplicable a teléfonos móviles inteligentes, para la orientación en espacios urbanos o edificados con mayor o menor complejidad de personas, especialmente aplicable, aunque no limitativo, a personas con un cierto grado de discapacidad, en especial del espectro cognitivo, considerando que la percepción visual de muchas de estas personas es una buena cualidad que es posible aprovechar. Para ello, el sistema comprende unas balizas luminosas a modo de elementos fijos, y al menos un dispositivo electrónico portátil portado por el usuario, como un teléfono de última generación o una tableta, que incorpora un programa o programas necesarios para identificar visualmente las balizas e indicar al usuario el camino a tomar.
Sistema de guiado de un dron en fase de aproximación a una plataforma en particular naval con vistas a su aterrizaje.
(11/12/2013) Sistema de guiado de un dron en fase de aproximación a una plataforma con vistas a su aterrizaje, quecomprende una cámara , conectada a unos medios de análisis de imágenes y a unos medios de cálculo deórdenes de mando destinadas a medios de pilotaje automático del dron, estando dicha cámara , dichosmedios de análisis y dichos medios de cálculo instalados en el dron,
caracterizado porque:
- el sistema está destinado a equipar una plataforma naval formada por un buque de superficie ,
- el sistema de guiado comprende un emisor de haces instalado sobre la plataforma, estando dicho emisor dehaces estabilizado en balanceo y en cabeceo sobre el buque, y emitiendo dicho emisor de haces un abanico de haces ópticos de guiado sobre…
SISTEMA DE CÁLCULO DE POSICIONES INDICATIVAS, CONTROLADOR PARA UN SISTEMA DE CÁLCULO DE POSICIONES INDICATIVAS, SISTEMA DE JUEGOS Y MÉTODO DE CÁLCULO DE POSICIONES INDICATIVAS.
(21/01/2011) Un sistema de cálculo de posiciones indicativas que calcula una posición indicativa de un controlador , comprendiendo dicho sistema de cálculo de posiciones indicativas: una sección fotoemisora ; un controlador constituido por una sección de formación de imágenes que capta una imagen y emite información de fotorrecepción de píxeles de la imagen captada; una sección determinativa que determina si cada uno de los píxeles es un píxel efectivo primario que satisface una primera condición cuando un valor de la información de fotorrecepción supera un primer valor liminar, y seguidamente determina si el píxel efectivo primario es un píxel efectivo secundario que satisface una segunda condición cuando el valor de la información de fotorrecepción también supera un segundo valor liminar superior al primer valor liminar; y una sección…
DISPOSITIVO PARA EL RECONOCIMIENTO DE UN PELIGRO DE COLISION ENTRE DOS OBJETOS MOVILES RELATIVAMENTE ENTRE SI, ESPECIALMENTE VEHICULOS.
(01/05/2007) Dispositivo para el reconocimiento de un peligro de colisión entre al menos dos objetos móviles relativamente entre sí, en el que en cada objeto se pueden instalar una disposición de emisión para la emisión de una radiación óptica en la región infrarroja o en la región visible en todas las direcciones y una disposición de recepción para esta radiación óptica, caracterizado porque - la disposición de recepción instalada en cada objeto para cada cuadrante del sistema de coordenadas del objeto está constituida por al menos dos receptores planos, que están dispuestos bajo un ángulo determinado entre sí, - en cada objeto está previsto un control, que activa la disposición de recepción a intervalos de tiempo, y - en cada objeto está previsto un procesador…
PROCESO DE EVALUACION SIMULTANEA DE LAS POSICIONES RELATIVAS DE UNA PLURALIDAD DE BALIZAS.
(01/01/1995). Solicitante/s: MICROMAINE A.S.I. Inventor/es: BROUANT, MARC.
EL DOMINIO DEL INVENTO ES EL DE LOS PROCESOS DE LOCALIZACION Y EXPLORACION DE MAQUINAS U OBJETOS MOVILES MATERIALIZADO EN PARTICULAR POR BALIZAS EMISORAS DE SEÑALES OPTICAS PULSADAS Y CODIFICADAS TEMPORALMENTE. EL OBJETIVO ESENCIAL DEL INVENTO ES SUMINISTRAR UN NUEVO PROCESO DE EVALUACION SIMULTANEO DE LAS POSICIONES DE UNA PLURALIDAD DE BALIZAS POR UN DISPOSITIVO DE OBSERVACION SUMINISTRANDO DATOS ANGULARES QUE CORRESPONDEN A LA POSICION DE UNA BALIZA OBSERVADA. ESTE OBJETIVO ES ALCANZADO ESTABLECIENDO UNA REPARTICION TEMPORAL DE LOS IMPULSOS DE LAS SEÑALES OPTICAS EN EL INTERIOR DE UN PERIODO DE TIEMPO DE OBSERVACION, SINCRONIZANDO LA EMISION DE LAS SEÑALES OPTICAS DE LAS BALIZAS, INICIALIZANDO UNA BASE DE TIEMPO AL NIVEL DEL DISPOSITIVO DE OBSERVACION, MEMORIZANDO LOS DATOS ANGULARES MEDIDOS PARA CADA IMPULSO LUMINOSO DETECTADO E IDENTIFICANDO LAS BALIZAS EMISORAS POR ANALISIS DE LA REPARTICION TEMPORAL DE LOS IMPULSOS DETECTADOS.
PROCEDIMIENTO DE GUIADO DE UN VEHICULO.
(01/01/1986). Solicitante/s: OFFICE NATIONAL D'ETUDES ET DE RECHERCHES AEROSPA. COMPAGNIE FRANCAISE DES CONVOYEURS S.A. (CFC).
PROCEDIMIENTO Y DISPOSITIVO DE GUIADO DE UN VEHICULO AUTONOMO, PROVISTO PARA LA DETERMINACION DE SU POSICION DE MEDIOS DE TOMAS DE VISTA, ORIENTADOS EN UNA DIRECCION CONOCIDA RESPECTO A UNOS EJES DE REFERENCIA, UNIDOS AL VEHICULO EN MOVIMIENTO. COMPRENDE LAS SIGUIENTES ETAPAS: PRIMERA, SE PREVEEN EN LA ZONA DE EVOLUCION DEL VEHICULO UNA SERIE DE BALIZAS LUMINOSAS QUE EMITEN UNA LUZ POLARIZADA LINEALMENTE; SEGUNDA, A BORDO DEL VEHICULO, SE EFECTUA CADA TOMA DE VISTAS SEPARADAMENTE A TRAVES DE DOS FILTROS DE POLARIZACIONES LINEALES DIFERENTES, Y SE COMPARA CADA VEZ LAS DOS IMAGENES RESULTANTES; TERCERA, EN UNA FASE DE APRENDIZAJE SE DESPLAZA EL VEHICULO A LO LARGO DE UNA TRAYECTORIA DETERMINADA, REGISTRANDO LA SECUENCIA DE LOS JUEGOS DE SEÑALES ENCONTRADAS A SU PASO; Y POR ULTIMO, SE PERMITE LA EVOLUCION DEL VEHICULO CON PILOTAJE AUTOMATICO, MEDIANTE UN SISTEMA COMPARATIVO.
{kind=link}