ROBOT DE ESTANTERÍA PARA CARTUCHOS DE MERCANCÍAS ALARGADAS.
Robot de estantería (14) para cartuchos, particularmente cartuchos de mercancías alargadas (10),
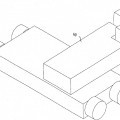
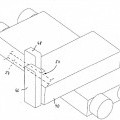
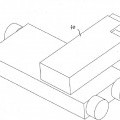
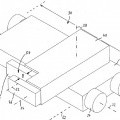
con al menos un soporte de cartuchos (20) horizontal, que presenta un carro de transporte (30) que puede desplazarse a lo largo de una pista de guía horizontal por medio de una unidad de accionamiento (60, 62) con una unidad de agarre (40, 46, 48) para respectivamente al menos un cartucho (10), presentando la unidad de agarre un cabezal de agarre (40) que puede girar alrededor de un eje de giro (38) vertical entre una primera posición de tracción y una segunda posición de tracción, caracterizado porque el cabezal de agarre porta dos elementos de agarre (46, 48) dispuestos con distinta distancia del eje de giro (38), que pueden desplazarse independientemente entre sí entre una posición de reposo descendida y una posición de agarre ascendida
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09004680.
Solicitante: REMMERT GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: BRUNNENSTRASSE 113 32584 LÖHNE ALEMANIA.
Inventor/es: Dirk Kammel.
Fecha de Publicación: .
Fecha Solicitud PCT: 31 de Marzo de 2009.
Clasificación Internacional de Patentes:
- B65G1/04B8
- B66F9/07 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › Dispositivos para almacenar desde el suelo hasta el techo, p. ej. apiladoras.
- B66F9/14 B66F 9/00 […] › desplazables lateralmente, p. ej. orientables, para movimientos de giro o de traslación.
- B66F9/19B
Clasificación PCT:
- B65G1/04 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
- B66F9/07 B66F 9/00 […] › Dispositivos para almacenar desde el suelo hasta el techo, p. ej. apiladoras.
- B66F9/14 B66F 9/00 […] › desplazables lateralmente, p. ej. orientables, para movimientos de giro o de traslación.
- B66F9/19 B66F 9/00 […] › Medios adicionales para facilitar la descarga.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356033_T3.pdf

Fragmento de la descripción:
La invención se refiere a un robot de estantería para cartuchos, por ejemplo, cartuchos de mercancías alargadas, con al menos un soporte de cartuchos horizontal, que presenta un carro de transporte que puede desplazarse a lo largo de una pista de guía horizontal por medio de una unidad de accionamiento con una unidad de agarre para al menos un cartucho cada vez. 5
Un robot de estantería de este tipo se conoce, por ejemplo, por el documento DE 10 2005 039 466 A1 y ha dado del todo un buen resultado en la práctica. En este estado de la técnica, la unidad de agarre presenta dos brazos de agarre paralelos, separados, que pueden rotar alternativamente entre una posición de reposo y una posición de arrastre por medio de una palanca articulada, debiéndose accionar las palancas articuladas con una unidad de manejo dispuesta de manera fija en el soporte de cartuchos. Esta disposición fija es en ocasiones impeditiva en el 10 funcionamiento.
El documento JP63041302 desvela un robot de estantería con una unidad de agarre y un cabezal de agarre que puede girar alrededor de un eje de giro vertical.
El objetivo de la invención consiste en proponer un robot de estantería mejorado, con el que la unidad de agarre independientemente de la posición de desplazamiento actual del carro de transporte pueda llevarse a la posición 15 de reposo o posición de agarre, para posibilitar un modo de trabajo más flexible del robot de estantería.
Este objetivo se soluciona según la invención con un robot de estantería genérico según la reivindicación 1 mediante la medida de que la unidad de agarre presenta un cabezal de agarre que puede girar alrededor de un eje de giro vertical entre una primera posición de tracción y una segunda posición de tracción, que porta dos elementos de agarre dispuestos con distancia recíproca del eje de giro, que pueden desplazarse independientemente entre sí entre 20 una posición de reposo descendida y una posición de agarre ascendida.
Mediante la posibilidad de ascender o descender los elementos de agarre independientemente entre sí se obtiene la gran ventaja frente al estado de la técnica de que la distancia recíproca de los elementos de agarre puede estar realizada de manera relativamente pequeña y, sin embargo, está garantizado un agarre seguro de un arrastrador de un cartucho que va a almacenarse o a sacarse. 25
Puede estar previsto que al menos un elemento de agarre pueda desplazarse a lo largo de una guía dispuesta vertical u oblicuamente, que puede ser curvada o recta.
Alternativamente puede estar previsto que al menos un elemento de agarre se mantenga excéntrico con respecto a un eje de rotación horizontal y que pueda rotar alrededor del mismo, de modo que es posible un desplazamiento en dirección vertical. A este respecto está previsto preferentemente que los elementos de agarre 30 puedan rotar alrededor de ejes de rotación paralelos, pudiendo estar dispuestos los ejes de rotación de manera concéntrica o con distancia recíproca.
Preferentemente está previsto que cada elemento de agarre pueda rotar desde la posición de reposo en un ángulo de rotación determinado a la posición de agarre. Este ángulo de rotación puede ascender, por ejemplo, a 30º, 40º, 50º, 60º, 70º, 80º, 90º o más. 35
En un perfeccionamiento preferente está previsto que al menos uno de los elementos de agarre esté provisto de un punto de ruptura controlada, para que no puedan producirse daños de material mayores en caso de un funcionamiento erróneo.
De manera conveniente, cada elemento de agarre se acciona de manera eléctrica, hidráulica o neumáticamente controlada por un servomotor o motor paso a paso. 40
De manera en sí conocida está previsto que el carro de transporte pueda desplazarse en dos carriles guía paralelos en forma de C en la sección transversal. De manera conveniente, el carro de transporte tiene cuatro rodillos de rodadura.
El eje de giro vertical puede estar dispuesto de manera centrada con respecto al carro de transporte o entre los carriles de rodadura, lo que es ventajoso con respecto a la simetría de las fuerzas producidas. Por otra parte es 45 ventajoso, con respecto a una distancia constructiva lo más grande posible de los elementos de agarre del eje de giro, que el eje de giro vertical esté dispuesto de manera excéntrica con respecto al carro de transporte o entre los carriles de rodadura, para posibilitar una mayor capacidad de superación de una distancia entre el arrastrador de un cartucho que va a desplazarse y el carro de transporte.
De manera conveniente está previsto que la primera y la segunda posición de tracción estén distanciadas entre 50 sí 180º, es decir, se encuentren diametralmente opuestas entre sí con respecto al eje de giro.
Es ventajoso que el carro de transporte pueda desplazarse mediante dos cadenas de tracción distanciadas, paralelas, pudiendo presentar una de las cadenas de tracción, que está dispuesta más próxima al eje de giro que la otra, una resistencia a la tracción mayor y una extensión por carga menor que la otra.
La invención se refiere además a un almacén de estantería con un robot de estantería según la invención para 55
almacenar y sacar cartuchos, particularmente cartuchos de mercancías alargadas, conteniendo el almacén de estantería compartimentos de estantería en pilares de estantería verticales en varios niveles a distancias regulares con bases para los cartuchos, pudiendo desplazarse el robot de estantería frontalmente de manera horizontal y vertical delante de los compartimentos de estantería y dirigiéndose el soporte de cartuchos en dirección de extensión de los cartuchos. 5
La invención se refiere además a un procedimiento para sacar un cartucho de un almacén de estantería con un robot de estantería según la invención, con las etapas: mover el soporte de cartuchos frontalmente delante de un compartimento de estantería con un cartucho que va a sacarse, girar el cabezal de agarre a una posición de tracción, en la que los elementos de agarre están dirigidos al cartucho que va a sacarse, en caso de elementos de agarre que se encuentran en posición de reposo, desplazar el carro de transporte a un extremo del soporte de cartuchos adyacente al 10 cartucho, hasta que un primer elemento de agarre, que está más separado del eje de giro que un segundo elemento de agarre, se encuentre detrás de un arrastrador de cartuchos, mover el primer elemento de agarre a la posición de agarre, mover hacia atrás el carro de transporte y arrastrar el cartucho al soporte de cartuchos del robot de estantería.
A este respecto puede estar previsto que el segundo elemento de agarre se mueva a la posición de agarre después de que el primer elemento de agarre se apoye en el arrastrador de cartuchos, para evitar, en caso de un 15 retardo del movimiento de desplazamiento del carro de transporte, un deslizamiento incontrolado del cartucho con respecto al carro de transporte.
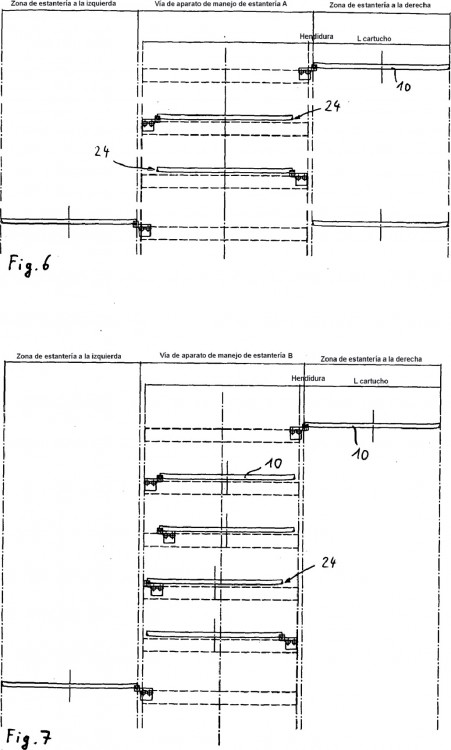
La invención se refiere adicionalmente a un procedimiento para transferir un cartucho desde un primer compartimento de estantería a un segundo compartimento de estantería de un almacén de estantería con un robot de estantería según la invención, con las etapas: a) mover el soporte de cartucho frontalmente delante del primer 20 compartimento de cartuchos, b) girar el cabezal de agarre hacia una posición de tracción, en la que los elementos de agarre están dirigidos al cartucho que va a transferirse, en caso de elementos de agarre que se encuentran en posición de reposo, c) desplazar el carro de transporte hasta un primer extremo del soporte de cartuchos adyacente al cartucho, hasta que un primer elemento de agarre, que está más separado del eje de giro que un segundo elemento de agarre, se encuentre detrás de un primer arrastrador de cartuchos, d) mover el primer elemento de agarre a la posición de agarre, 25 e) mover hacia atrás el carro de transporte a un extremo opuesto del soporte de cartuchos y arrastrar el cartucho al soporte de cartuchos del robot de estantería, f) mover el primer elemento de agarre a la posición de reposo, rotar el cabezal de agarre hacia una posición de tracción opuesta y desplazar el carro de transporte al primer extremo del soporte de cartuchos, g) mover el soporte de cartuchos frontalmente delante de la segunda estantería, h) mover el segundo elemento de agarre a la posición de agarre, desplazar el carro de transporte al extremo opuesto del soporte de 30 cartuchos y deslizar el cartucho en el segundo... [Seguir leyendo]
Reivindicaciones:
1. Robot de estantería (14) para cartuchos, particularmente cartuchos de mercancías alargadas (10), con al menos un soporte de cartuchos (20) horizontal, que presenta un carro de transporte (30) que puede desplazarse a lo largo de una pista de guía horizontal por medio de una unidad de accionamiento (60, 62) con una unidad de agarre (40, 46, 48) para respectivamente al menos un cartucho (10), presentando la unidad de agarre un cabezal de agarre (40) 5 que puede girar alrededor de un eje de giro (38) vertical entre una primera posición de tracción y una segunda posición de tracción, caracterizado porque el cabezal de agarre porta dos elementos de agarre (46, 48) dispuestos con distinta distancia del eje de giro (38), que pueden desplazarse independientemente entre sí entre una posición de reposo descendida y una posición de agarre ascendida.
2. Robot de estantería según la reivindicación 1, caracterizado porque al menos un elemento de agarre puede 10 desplazarse a lo largo de una guía dispuesta vertical u oblicuamente.
3. Robot de estantería según la reivindicación 1, caracterizado porque al menos un elemento de agarre (46, 48) se mantiene de manera excéntrica con respecto a un eje de rotación (52, 54) horizontal y puede rotar alrededor del mismo.
4. Dispositivo según la reivindicación 3, caracterizado porque los elementos de agarre (46, 48) pueden rotar 15 alrededor de ejes de rotación (52, 54) paralelos, que pueden estar dispuestos de manera concéntrica o con distancia recíproca.
5. Robot de estantería según la reivindicación 3 ó 4, caracterizado porque cada elemento de agarre (46, 48) puede rotar desde la posición de reposo alrededor de un ángulo de rotación determinado a la posición de agarre.
6. Robot de estantería según la reivindicación 5, caracterizado porque el ángulo de rotación asciende a entre 20 30º y 120º.
7. Robot de estantería según una de las reivindicaciones anteriores, caracterizado porque al menos un elemento de agarre está provisto de un punto de ruptura controlada.
8. Robot de estantería según una de las reivindicaciones anteriores, caracterizado porque cada elemento de agarre (46, 48) se acciona de manera eléctrica, neumática o hidráulicamente controlada por un servomotor o motor paso 25 a paso.
9. Robot de estantería según una de las reivindicaciones anteriores, caracterizado porque el carro de transporte (30) puede desplazarse en dos carriles de rodadura paralelos en forma de C en la sección transversal.
10. Robot de estantería según una de las reivindicaciones anteriores, caracterizado porque el carro de transporte (30) presenta cuatro rodillos de rodadura (34). 30
11. Robot de estantería según una de las reivindicaciones anteriores, caracterizado porque el eje de giro (38) vertical está dispuesto de manera centrada con respecto al carro de transporte (30).
12. Robot de estantería según una de las reivindicaciones 1 a 10, caracterizado porque el eje de giro (38) vertical está dispuesto de manera excéntrica con respecto al carro de transporte (30).
13. Robot de estantería según una de las reivindicaciones anteriores, caracterizado porque la primera y segunda 35 posición de tracción están distanciadas entre sí 180º.
14. Robot de estantería según una de las reivindicaciones anteriores, caracterizado porque el carro de transporte (30) puede desplazarse mediante dos cadenas de tracción (60, 62) distanciadas paralelas.
15. Robot de estantería según la reivindicación 12 y 14, caracterizado porque una de las cadenas de tracción (62), que está dispuesta más próxima al eje de giro (38) que la otra (60), presenta una resistencia a la tracción mayor y 40 una extensión por carga menor que la otra cadena de tracción (60).
16. Almacén de estantería para cartuchos, particularmente cartuchos de mercancías alargadas con un robot de estantería (14) según una de las reivindicaciones anteriores, conteniendo el almacén de estantería compartimentos de estantería en pilares de estantería (6) verticales en varios niveles (8) a distancias regulares con bases para los cartuchos de mercancías alargadas (10), pudiendo desplazarse el robot de estantería (14) frontalmente de manera 45 horizontal y vertical delante de los compartimentos de estantería y dirigiéndose el soporte de cartuchos (20) en dirección de extensión de los cartuchos (10).
17. Procedimiento para sacar un cartucho, particularmente cartucho de mercancías alargadas, de un almacén de estantería con un robot de estantería (14) según una de las reivindicaciones 1 a 15, con las etapas: mover el soporte de cartuchos (20) frontalmente delante de un compartimento de estantería con un cartucho (10) que va a sacarse, girar el 50 cabezal de agarre (40) a una posición de tracción, en la que los elementos de agarre (46, 48) están dirigidos al cartucho (10) que va a sacarse, en caso de elementos de agarre que se encuentran en posición de reposo, desplazar el carro de transporte (30) a un extremo del soporte de cartuchos (20) adyacente al cartucho (10), hasta que un primer elemento de agarre (46), que está más separado del eje de giro (38) que un segundo elemento de agarre (48), se encuentre detrás
de un arrastrador de cartuchos (24), mover el primer elemento de agarre (46) a la posición de agarre, mover hacia atrás el carro de transporte (30) y arrastrar el cartucho (10) al soporte de cartuchos (20) del robot de estantería (14).
18. Procedimiento según la reivindicación 17, caracterizado porque se mueve el segundo elemento de agarre (48) a la posición de agarre, después de que el primer elemento de agarre (46) se apoye en el arrastrador de cartuchos (24). 5
19. Procedimiento para transferir un cartucho, particularmente un cartucho de mercancías alargadas (10), desde un primer compartimento de estantería a un segundo compartimento de estantería de un almacén de estantería con un robot de estantería (14) según una de las reivindicaciones 1 a 15, con las etapas: a) mover el soporte de cartuchos (20) frontalmente delante del primer compartimento de cartuchos, b) girar el cabezal de agarre (40) a una posición de tracción, en la que los elementos de agarre (46, 48) están dirigidos al cartucho (10) que va a transferirse, en caso de 10 elementos de agarre que se encuentran en posición de reposo, c) desplazar el carro de transporte (30) a un primer extremo del soporte de cartuchos (20) adyacente al cartucho (10), hasta que un primer elemento de agarre (46), que está más separado del eje de giro (38) que un segundo elemento de agarre (48), se encuentre detrás de un primer arrastrador de cartuchos (24), d) mover el primer elemento de agarre (46) a la posición de agarre, e) mover hacia atrás el carro de transporte (30) a un extremo opuesto del soporte de cartuchos (20) y arrastrar el cartucho (10) al soporte de 15 cartuchos (20) del robot de estantería (14), f) mover el primer elemento de agarre (46) a la posición de reposo, rotar el cabezal de agarre (40) a una posición de tracción opuesta y desplazar el carro de transporte (30) al primer extremo del soporte de cartuchos (20), g) mover el soporte de cartuchos frontalmente delante del segundo compartimento de estantería, h) mover el segundo elemento de agarre (48) a la posición de agarre, desplazar el carro de transporte al extremo opuesto del soporte de cartuchos (20) y deslizar el cartucho (10) al segundo compartimento de estantería. 20
20. Procedimiento según la reivindicación 19, caracterizado porque en la etapa f) el cartucho (10) con cabezal de agarre (40) girado a una posición de tracción opuesta, se arrastra adicionalmente en dirección del extremo opuesto del soporte de cartuchos (20) un trayecto que corresponde a aproximadamente dos veces la distancia del eje de giro (38) vertical del cabezal de agarre (40) desde el centro del espacio intermedio (50) de los elementos de agarre (46, 48), y sólo entonces se mueve el primer elemento de agarre (46) a la posición de reposo y se desplaza el carro de transporte 25 (30) al primer extremo del soporte de cartuchos (20).
Patentes similares o relacionadas:
Sistema de almacenamiento en estantería con realimentación de energía, del 1 de Julio de 2020, de KNAPP LOGISTIK AUTOMATION GMBH: Sistema de almacenamiento en estantería con al menos dos unidades de estantería (1a-1d), presentando cada unidad de estantería un dispositivo […]
GRÚA APILADORA DE DESPLAZAMIENTO ELEVADA, del 27 de Abril de 2020, de AIR VOL, S.A: 1. Grúa apiladora de desplazamiento elevada para el almacenamiento y/o la recuperación de palés o similares en un sistema de almacenamiento, comprendiendo […]
Procedimiento y dispositivo para el almacenamiento y recuperación o reubicación de contenedores en almacenes de gran altura, del 4 de Marzo de 2020, de AMOVA GmbH: Procedimiento para almacenar y recuperar o reubicar contenedores en almacenes de gran altura de una instalación de transbordo, […]
Equipo de almacenamiento y recuperación para una estantería de almacenamiento, del 27 de Mayo de 2019, de STOCK, Bernhard (100.0%): Equipo de almacenamiento y recuperación para una estantería de almacenamiento , en particular un almacén automático de gran altura o un almacén de piezas pequeñas, […]
Apiladora con un mecanismo deslizante mejorado, del 24 de Abril de 2019, de Inpeco Holding Ltd: Una apiladora para transportar, insertar e izar recipientes de tubos de ensayo de material biológico en / retirarlos de unos emplazamientos de una pluralidad […]
Sistema a base de un dispositivo a modo de estante o soporte y medio receptor de carga telescópica correspondiente sin ajuste de anchura, del 5 de Noviembre de 2018, de SSI Schäfer Automation GmbH: Dispositivo de soporte para almacenar y desalmacenar la mercancía almacenada en y de los compartimentos de los estantes , donde […]
Disposición y procedimiento para el funcionamiento de un transelevador, del 30 de Mayo de 2018, de TGW MECHANICS GMBH: Procedimiento para el funcionamiento de un transelevador desplazable sobre un tramo de carriles y alimentado por una fuente de alimentación […]
Aparato para piezas pequeñas, del 19 de Octubre de 2016, de Stöcklin Logistik AG: Aparato para piezas pequeñas con una plataforma elevadora que puede desplazarse en vertical en un dispositivo de guía y un medio de alojamiento […]