MOTOR CON MECANISMO EQUILIBRADOR.
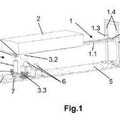
Motor incluyendo un mecanismo de manivela (1b), y un mecanismo equilibrador (1h) configurado para impedir vibraciones producidas por el mecanismo de manivela (1b),
donde una fuerza de traslacion generada por una fuerza inercial primaria (F1) del mecanismo de manivela (1b) y una fuerza inercial (F2) del mecanismo equilibrador (1h) definen un centro de rotacion instantaneo del motor (1), caracterizado porque el mecanismo de manivela (1b) y el mecanismo equilibrador (1h) estan configurados de tal manera que dicho centro de rotacion instantaneo del motor (1) este dispuesto en la proximidad de una posicion deseada opcional del motor regulando una aceleracion (a2, a4) producida por una fuerza de traslacion generada por una fuerza inercial primaria (F1) del mecanismo de manivela (1b) y una fuerza inercial (F2) del mecanismo equilibrador (1h) y una aceleracion (a1, a3) producida por un momento generado por la fuerza inercial primaria (F1) del mecanismo de manivela (1b) y la fuerza inercial (F2) del mecanismo equilibrador (1h)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2005/012317.
Solicitante: YAMAHA HATSUDOKI KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 2500 SHINGAI IWATA-SHI, SHIZUOKA 438-8501 JAPON.
Inventor/es: Okamoto,Naoki , OHTA,Kazuhiro, SANO,Taketoshi, TAKEUCHI,Akimitsu.
Fecha de Publicación: .
Fecha Solicitud PCT: 4 de Julio de 2005.
Clasificación Internacional de Patentes:
- F16F15/22 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16F RESORTES; AMORTIGUADORES; MEDIOS PARA AMORTIGUAR LAS VIBRACIONES. › F16F 15/00 Supresión de las vibraciones en los sistemas (dispositivos de suspensión de los asientos de vehículos B60N 2/50 ); Medios o dispositivos para evitar o reducir las fuerzas de desequilibrio, p. ej. debidas al movimiento (ensayo estático o equilibrado dinámico de máquinas o estructuras G01M 1/00). › Compensación de las fuerzas de inercia.
- F16F15/26R
- F16F7/104 F16F […] › F16F 7/00 Amortiguadores de vibraciones; Amortiguadores de choques (utilizando un fluido F16F 5/00, F16F 9/00; especiales para sistemas rotativos F16F 15/10). › estando montado el miembro de inercia de manera elástica.
Clasificación PCT:
- B62M7/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62M PROPULSION POR EL CONDUCTOR DE VEHICULOS DE RUEDAS O DE TRINEOS; PROPULSION POR MOTOR DE TRINEOS O DE CICLOS; TRANSMISIONES ADAPTADAS ESPECIALMENTE A ESTOS VEHICULOS (disposiciones o montaje de transmisiones de vehículos en general B60K; elementos de transmisión en sí F16). › B62M 7/00 Ciclomotores caracterizados por la posición del motor (propulsados por el conductor con una fuente adicional de energía, p. ej. motor de combustión o motor eléctrico auxiliares B62M 6/00; cuadros caracterizados por la posición del motor de combustión B62K 11/00). › con motor entre ruedas delantera y trasera.
- F02B77/00 F […] › F02 MOTORES DE COMBUSTION; PLANTAS MOTRICES DE GASES CALIENTES O DE PRODUCTOS DE COMBUSTION. › F02B MOTORES DE COMBUSTION INTERNA DE PISTONES; MOTORES DE COMBUSTION EN GENERAL (plantas de turbinas de gas F02C; plantas de motores de desplazamiento positivo de gas caliente o de productos de combustión F02G). › Partes constitutivas, detalles o accesorios no previstos en otro lugar.
- F16F15/26 F16F 15/00 […] › en los sistemas con cigüeñales utilizando masas sólidas diferentes de los pistones ordinarios, que se desplazan con el sistema mismo.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2362284_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un motor según el preámbulo de la reivindicación independiente 1 o la reivindicación independiente 13.
Dicho motor se conoce por el documento de la técnica anterior JP-A-2003-237674 [documento de Patente 1].
Convencionalmente, se conoce un motor provisto de un mecanismo de manivela y un mecanismo equilibrador que inhibe las vibraciones producidas por el mecanismo de manivela (véase, por ejemplo, el documento de Patente 1).
El documento de Patente 1 describe una motocicleta tipo scooter que soporta un mecanismo equilibrador uniaxial para generación de una fuerza inercial, que se invierte en dirección a y tiene la misma magnitud que la de una fuerza inercial primaria de un mecanismo de manivela, con el fin de reducir las vibraciones producidas por la fuerza inercial primaria del mecanismo de manivela.
[Documento de Patente 1]
Descripción de la invención
Problemas que la invención ha de resolver
Dado que la construcción descrita en el documento de Patente 1 se pone de tal manera que un lugar vectorial de una fuerza inercial primaria de un mecanismo de manivela sea un círculo y una fuerza inercial de un mecanismo equilibrador se invierta en dirección a y tenga la misma magnitud que la de la fuerza inercial primaria del mecanismo de manivela en todas las fases, no se genera fuerza de traslación por la fuerza inercial primaria del mecanismo de manivela y la fuerza inercial del mecanismo equilibrador. Por ello, es posible impedir las vibraciones producidas por una fuerza de traslación generada por la fuerza inercial primaria del mecanismo de manivela y la fuerza inercial del mecanismo equilibrador.
Dado que un eje equilibrador está dispuesto en una posición espaciada una distancia predeterminada de un cigüeñal, un par de fuerzas es generado por la fuerza inercial primaria del mecanismo de manivela y la fuerza inercial del mecanismo equilibrador. Dado que el par de fuerzas es generado con un centro de gravedad de un motor como un centro de rotación instantáneo, se da la desventaja de que se generan vibraciones que giran con el centro de gravedad del motor como el centro de rotación instantáneo. A continuación, con la disposición descrita en el documento de Patente 1, se mantiene un motor a través de una articulación con el fin de evitar que las vibraciones producidas por el par de fuerzas sean transmitidas al motor. Más específicamente, con el documento de Patente 1, en el caso donde el motor es soportado en una posición opcional distinta del centro de gravedad del motor, no se evita que se generen vibraciones en esta posición, sino que la articulación evita la transmisión de vibraciones a una carrocería de vehículo. Es decir, las vibraciones propiamente dichas producidas por el par de fuerzas generadas en una posición en la que se soporta el motor, no son controladas e impedidas.
La invención se ha pensado con el fin de resolver el problema y tiene por objeto por proporcionar un motor provisto de un mecanismo equilibrador que puede inhibir vibraciones producidas por un par de fuerzas generadas por una fuerza inercial primaria de un mecanismo de manivela y una fuerza inercial del mecanismo equilibrador, en una posición deseada opcional del motor.
Según la presente invención dicho objeto se logra con un motor que tiene las características de la reivindicación independiente 1. Se exponen realizaciones preferidas en las reivindicaciones dependientes.
Además, dicho objeto también se logra con un motor que tiene las características de la reivindicación independiente
13. Se exponen realizaciones preferidas en las reivindicaciones dependientes.
Consiguientemente, también se facilita una motocicleta que lleva el motor.
La invención se ilustra y explica con respecto a los varios aspectos y principios de las ideas relacionadas.
Los inventores de la presente solicitud han observado el hecho de que se pueden evitar las vibraciones en una posición deseada colocando un centro de rotación instantáneo en una posición deseada opcional de un motor. Han observado el hecho de que una fuerza inercial primaria generada por el mecanismo de manivela incluye un componente de rotación y un componente de traslación y un centro de rotación instantáneo de un motor puede ser colocado en una posición deseada regulando una aceleración producida por un par de fuerzas, el cual componente de rotación equilibra la generación de una fuerza inercial del mecanismo equilibrador, y una aceleración producida por el componente de traslación, y han realizado la presente invención.
Es decir, un motor con un mecanismo equilibrador, en un aspecto de la idea de la presente invención, incluye un mecanismo de manivela, un mecanismo equilibrador que inhibe vibraciones producidas por el mecanismo de manivela, y un centro de rotación instantáneo del motor está dispuesto en la proximidad de una posición deseada predeterminada regulando una aceleración producida por una fuerza de traslación generada por una fuerza inercial primaria del mecanismo de manivela y una fuerza inercial del mecanismo equilibrador y una aceleración producida por un par de fuerzas generadas por la fuerza inercial primaria del mecanismo de manivela y la fuerza inercial del mecanismo equilibrador.
Con el motor con un mecanismo equilibrador en el primer aspecto, un centro de rotación instantáneo del motor está dispuesto en la proximidad de una posición deseada predeterminada regulando una aceleración producida por una fuerza de traslación generada por una fuerza inercial primaria del mecanismo de manivela y una fuerza inercial del mecanismo equilibrador y una aceleración producida por un par de fuerzas generadas por la fuerza inercial primaria del mecanismo de manivela y la fuerza inercial del mecanismo equilibrador. Por lo tanto, se evita que se generen vibraciones producidas por un par de fuerzas generadas por la fuerza inercial primaria del mecanismo de manivela y la fuerza inercial del mecanismo equilibrador en la proximidad de la posición deseada predeterminada, en la que está dispuesto un centro de rotación instantáneo. Como resultado, las vibraciones producidas por un par de fuerzas generadas por la fuerza inercial primaria del mecanismo de manivela y la fuerza inercial del mecanismo equilibrador pueden ser evitadas en la proximidad de una posición opcional (posición deseada).
En el motor con un mecanismo equilibrador en el primer aspecto, una aceleración producida por la fuerza de traslación y una aceleración producida por el par de fuerzas se regulan preferiblemente de manera que se pongan sustancialmente en direcciones opuestas y tengan sustancialmente la misma magnitud en la proximidad de la posición deseada predeterminada, en la que está dispuesto el centro de rotación instantáneo. Con tal construcción, se puede disponer fácilmente un centro de rotación instantáneo en la proximidad de una posición deseada opcional, de modo que las vibraciones producidas por un par de fuerzas puedan ser evitadas fácilmente en la proximidad de una posición deseada opcional.
En el motor con un mecanismo equilibrador en el primer aspecto, la fuerza inercial primaria del mecanismo de manivela define preferiblemente una forma elíptica predeterminada trazada por un lugar, que corresponde a un ciclo, en representación vectorial de la fuerza. Con tal construcción, haciendo uso de la fuerza inercial primaria del mecanismo de manivela, que define un lugar vectorial de forma elíptica en contraposición a la fuerza inercial del mecanismo equilibrador, que generalmente tiene un lugar vectorial en forma de un círculo perfecto, es posible generar un componente de fuerza de traslación. Por ello, es posible poner fácilmente un centro de rotación instantáneo en la proximidad de una posición deseada opcional con el uso de una aceleración producida por la fuerza de traslación y una aceleración producida por el par de fuerzas.
En el motor con un mecanismo equilibrador, en el que la fuerza inercial primaria del mecanismo de manivela define una forma elíptica predeterminada, preferiblemente, el mecanismo de manivela incluye un cigüeñal, el mecanismo equilibrador incluye un eje equilibrador, una línea recta de manivela/equilibrador, que conecta entre el eje equilibrador y el cigüeñal, está dispuesta de modo que sea sustancialmente paralela a una línea recta de centro de gravedad/posición deseada, que conecta entre un centro de gravedad del motor y la posición deseada predeterminada, un eje principal... [Seguir leyendo]
Reivindicaciones:
1. Motor incluyendo
un mecanismo de manivela (1b), y
un mecanismo equilibrador (1h) configurado para impedir vibraciones producidas por el mecanismo de manivela (1b),
donde una fuerza de traslación generada por una fuerza inercial primaria (F1) del mecanismo de manivela (1b) y una fuerza inercial (F2) del mecanismo equilibrador (1h) definen un centro de rotación instantáneo del motor (1), caracterizado porque el mecanismo de manivela (1b) y el mecanismo equilibrador (1h) están configurados de tal manera que dicho centro de rotación instantáneo del motor (1) esté dispuesto en la proximidad de una posición deseada opcional del motor regulando una aceleración (a2, a4) producida por una fuerza de traslación generada por una fuerza inercial primaria (F1) del mecanismo de manivela (1b) y una fuerza inercial (F2) del mecanismo equilibrador (1h) y una aceleración (a1, a3) producida por un momento generado por la fuerza inercial primaria (F1) del mecanismo de manivela (1b) y la fuerza inercial (F2) del mecanismo equilibrador (1h).
2. Motor según la reivindicación 1, caracterizado porque la aceleración (a2, a4) producida por la fuerza de traslación y la aceleración (a2, a4) producida por el momento generado por la fuerza inercial primaria (F1) del mecanismo de manivela (1b) y la fuerza inercial (F2) del mecanismo equilibrador (1h) se regulan de manera que se pongan sustancialmente en direcciones opuestas y tengan sustancialmente la misma magnitud en la proximidad de la posición deseada opcional, en la que está dispuesto el centro de rotación instantáneo.
3. Motor según la reivindicación 1 o 2, caracterizado porque la fuerza inercial primaria (F1) del mecanismo de manivela (1b) define una forma elíptica predeterminada (S1) definida por un lugar, que corresponde a un ciclo, en representación vectorial de la fuerza.
4. Motor según una de las reivindicaciones 1 a 3, caracterizado porque el mecanismo de manivela (1b) incluye un cigüeñal (1c), y
el mecanismo equilibrador (1h) incluye un eje equilibrador (1i), y
donde el eje equilibrador (1i) está dispuesto de modo que una línea recta de manivela/equilibrador (L2), que conecta entre el eje equilibrador (1i) y el cigüeñal (1c), sea sustancialmente paralela a una línea recta de centro de gravedad/posición deseada opcional (L1), que conecta entre un centro de gravedad (G) del motor (1) y la posición deseada opcional,
un eje principal de una elipse (S1) de la fuerza inercial primaria (F1) del mecanismo de manivela (1b) está dispuesto de manera que sea sustancialmente paralelo a la línea recta de manivela/equilibrador (L2),
la fuerza inercial (F2) del mecanismo equilibrador (1h) define una forma de círculo sustancialmente perfecto (S2) trazado por un lugar, que corresponde a un ciclo, en representación vectorial de la fuerza, y
el círculo perfecto (S2) de la fuerza inercial (F2) del mecanismo equilibrador (1h) es sustancialmente el mismo en dimensión que el eje principal de la elipse (S1) de la fuerza inercial primaria (F1) del mecanismo de manivela (1b).
5. Motor según una de las reivindicaciones 1 a 4, caracterizado porque el mecanismo de manivela (1b) incluye un contrapeso (1g), y donde la forma elíptica (S1) de la fuerza inercial primaria (F1) generada por el mecanismo de manivela (1b) se controla regulando al menos el contrapeso (1g).
6. Motor según cualquiera de las reivindicaciones 1 a 5, caracterizado por un eje de pivote (1a) que soporta el motor (1), y donde la posición deseada opcional, en la que está dispuesto el centro de rotación instantáneo del motor (1), corresponde al eje de pivote (1a).
7. Motor según cualquiera de las reivindicaciones 1 a 6, caracterizado porque el mecanismo equilibrador incluye un mecanismo equilibrador uniaxial (1h).
8. Motor según una de las reivindicaciones 1 a 7, caracterizado por un elemento antivibración, que se ha previsto para disminuir la transmisión de vibraciones, que son producidas por una fuerza inercial secundaria del mecanismo de manivela (1b), fuera de la posición deseada opcional.
9. Motor según la reivindicación 8, caracterizado porque la posición deseada opcional se define en un eje de pivote (1a) que soporta el motor (1) para que pueda bascular hacia arriba y hacia abajo, el elemento antivibración incluye un casquillo hecho de un elemento elástico y estructurado de modo que una fuerza elástica en una dirección primaria de dicha aceleración, que la fuerza inercial secundaria hace que actúe en el eje de pivote (1a), sea menor que una fuerza elástica en otras direcciones, y el casquillo está dispuesto en el eje de pivote (1a).
10. Motor según la reivindicación 8, caracterizado porque la posición deseada opcional se define en un eje de pivote (1a) que soporta el motor (1) para que pueda bascular hacia arriba y hacia abajo, el elemento antivibración incluye un elemento de articulación montado en un bastidor de carrocería de vehículo a través de un soporte y empujado a una posición neutra, el motor (1) es soportado por el elemento de articulación a través de un eje de pivote (1a) de manera que pueda bascular hacia arriba y hacia abajo, y una dirección, en la que el eje de pivote (1a) es movido alrededor del soporte, es sustancialmente según una dirección primaria de la aceleración que la fuerza inercial secundaria hace que actúe en el eje de pivote (1a).
11. Motor según la reivindicación 8, caracterizado porque la posición deseada opcional se define en un reposapiés, en el que el motorista pone los pies, el elemento antivibración incluye un amortiguador estructurado de modo que una fuerza elástica en una dirección primaria de la aceleración que la fuerza inercial secundaria hace que actúe en el reposapiés, sea menor que una fuerza elástica en otras direcciones, y el amortiguador está montado en el reposapiés.
12. Motocicleta incluyendo el motor (1) con un mecanismo equilibrador (1h), según una de las reivindicaciones 1 a
11.
13. Motor incluyendo
un mecanismo de manivela (1b) incluyendo un cigüeñal (1c), y
un mecanismo equilibrador (1h) incluyendo un eje equilibrador (1i),
donde una fuerza inercial primaria (F1) generada por rotación del cigüeñal (1c) incluye un componente de rotación que es de magnitud constante y gira, y un componente de traslación que es de dirección constante y varía en magnitud cuando el cigüeñal (1c) gira, y donde
una aceleración es producida por un momento del componente de rotación de la fuerza inercial primaria (F1) generada por rotación del cigüeñal (1c) y una fuerza inercial (F2) generada por rotación del eje equilibrador (1i) alrededor del centro de gravedad (G) del motor (1), y una aceleración es producida por el componente de traslación de la fuerza inercial primaria (F1) del cigüeñal (1c), caracterizado porque dichas aceleraciones están mutuamente sustancialmente en direcciones opuestas y tienen sustancialmente la misma magnitud en una posición deseada opcional del motor.
14. Motor según la reivindicación 13, caracterizado porque una relación λ del componente de rotación y el componente de traslación de la fuerza inercial primaria (F1) generada por rotación del cigüeñal (1c) es
**(Ver fórmula)**
donde M indica una masa de motor, I un momento inercial, Lp una distancia entre la posición deseada opcional y un centro de gravedad (G), LS una distancia de centro entre el cigüeñal (1c) y el equilibrador, y LC una distancia entre el cigüeñal (1c) y el centro de gravedad (G) en una dirección de centro de gravedad/posición deseada opcional (E2), y donde la fuerza inercial primaria (F1) del mecanismo de manivela (1b) se pone en fase de modo que el componente de traslación también sea máximo cuando el momento del componente de rotación de la fuerza inercial primaria (F1) generada por rotación del cigüeñal (1c) y de la fuerza inercial (F2) del mecanismo equilibrador (1h) sea máximo, y el componente de traslación también es mínimo cuando el momento de fuerzas es mínimo, y donde
una dirección (E1) del componente de traslación de la fuerza inercial primaria (F1) del mecanismo de manivela (1b) se pone perpendicular a una línea recta de centro de gravedad/posición deseada opcional (L1), que conecta entre un centro de gravedad (G) del motor (1) y la posición deseada opcional.
15. Motor según la reivindicación 14, caracterizado porque un lugar vectorial de la fuerza inercial primaria del mecanismo de manivela (1b) define una elipse (S1).
16. Motor según la reivindicación 15, caracterizado porque una dirección de eje principal χ y un eje principal A de la elipse (S1) tomado en una dirección de rotación del cigüeñal (1c) con un eje de cilindro como una referencia cumplen la ecuación 1:
ΨB indica un ángulo en una dirección de manivela/equilibrador con la dirección de centro de gravedad/posición deseada opcional (E2) como una referencia, y ΨF un ángulo en una dirección de eje de cilindro con la dirección de centro de gravedad/posición deseada opcional (E2) como una referencia.
17. Motor según la reivindicación 16, caracterizado porque un ángulo direccional α de un desequilibrio de manivela, es decir un contrapeso dispuesto en el cigüeñal (1c) con la dirección de eje de cilindro como una referencia, satisface la ecuación 2:
al tiempo de punto muerto superior.
18. Motor según la reivindicación 16, caracterizado porque una magnitud k del desequilibrio de manivela satisface la ecuación 3:
19. Motor según la reivindicación 14, caracterizado porque una dirección de la fuerza inercial (F2) del mecanismo equilibrador (1h) está orientada a lo largo del cigüeñal (1c) cuando la fuerza inercial primaria (F1) del mecanismo de manivela (1b) está orientada a lo largo del eje equilibrador (1i).
20. Motor según la reivindicación 19, caracterizado porque un ángulo direccional αB de la fuerza inercial del mecanismo equilibrador (1h), que incluye el eje equilibrador (1i), con una dirección paralela a un eje de cilindro como una referencia, satisface la ecuación 4:
21. Motor según la reivindicación 19, caracterizado porque una magnitud kB de la fuerza inercial del mecanismo equilibrador (1h) satisface la ecuación 5:
22. Motor según una de las reivindicaciones 13 a 21, caracterizado como un motor (1) para vehículos, donde la posición deseada opcional se pone en la proximidad de una posición, en la que el motor (1) es soportado.
23. Motor según la reivindicación 22, caracterizado como un motor (1) montado en un vehículo tipo scooter (2) que tiene una unidad de potencia de tipo basculante, donde la posición deseada opcional se pone en la proximidad de un eje de pivote (1a) que soporta la unidad de potencia en un bastidor de carrocería de vehículo (8) para hacer que la misma bascule libremente.
24. Motor según la reivindicación 23, caracterizado porque una línea recta de manivela/equilibrador (L2) está en paralelo a una línea recta de centro de gravedad/posición deseada opcional (11), y la posición deseada opcional se pone encima o debajo del cigüeñal (1c).
25. Motor según una de las reivindicaciones 13 a 21, caracterizado como un motor (1) para motocicletas, al que está fijado un reposapiés, y donde la posición deseada opcional se pone en la proximidad de los reposapiés.
26. Motor según una de las reivindicaciones 13 a 25, caracterizado porque el mecanismo equilibrador (1h) incluye el eje equilibrador (1i) que gira con relación al cigüeñal (1c) a una velocidad constante.
27. Motor según una de las reivindicaciones 13 a 25, caracterizado porque el mecanismo equilibrador (1h) incluye el eje equilibrador (1i) que gira con relación al cigüeñal (1c) a una velocidad constante en la misma dirección que la de éste último.
28. Motocicleta que soporta el motor (1) con un mecanismo equilibrador (1h), según una de las reivindicaciones 13 a 21, donde la posición deseada opcional del motor (1) se pone en la proximidad de una posición, en la que el motor
**(Ver fórmula)**
**(Ver fórmula)**
**(Ver fórmula)**
**(Ver fórmula)**
**(Ver fórmula)**
(1) es soportado en un bastidor de carrocería de vehículo.
29. Motocicleta que soporta el motor (1) con un mecanismo equilibrador (1h), según una de las reivindicaciones 13 a 21, en la proximidad de un centro de una carrocería de vehículo y fijando un reposapiés al motor (1), y donde la posición deseada opcional se pone en la proximidad del reposapiés.
Patentes similares o relacionadas:
AMORTIGUADOR CON REGULACIÓN DE CARGA EN FUNCIÓN DE LA FRECUENCIA MEDIANTE INERCIA HIDRAÚLICA, del 20 de Febrero de 2020, de NAJERA GARCIA, Jasiel: Amortiguador hidráulico con regulación de carga en función de la frecuencia mediante inercia hidráulica, compuesto por un cilindro que comprende una cámara interior […]
Amortiguador con regulación de carga en función de la frecuencia mediante inercia hidráulica, del 14 de Febrero de 2020, de NAJERA GARCIA, Jasiel: Amortiguador hidráulico con regulación de carga en función de la frecuencia por medio de inercia compuesto por un cilindro, que comprende una cámara interior, un vástago, un […]
DISIPADOR DE MASA SINTONIZADA BIDIRECCIONAL EN BASE A MULTIPLES PALANCAS COMPUESTAS, del 20 de Junio de 2019, de UNIVERSIDAD DE CHILE: Un disipador de masa sintonizada bidireccional en base a múltiples palancas compuestas (DMSB) en donde una masa controla la vibración de una estructura , en […]
DISPOSITIVO PARA MITIGACIÓN DE OSCILACIONES, del 4 de Abril de 2019, de FUNDACION CARTIF: 1. Dispositivo para mitigación de oscilaciones que comprende un bastidor , una masa unida al mismo y desplazable con respecto a dicho […]
Amortiguador, del 27 de Marzo de 2019, de Vibracoustic Forsheda AB: Un amortiguador de frecuencia sintonizado que comprende: un cuerpo de vibración (19; 19'); y al menos un elemento elástico que conecta el cuerpo […]
Unidad de medición inercial de aeronave no tripulada, del 21 de Diciembre de 2018, de SZ DJI Technology Co., Ltd: Una unidad de medición de inercia para una aeronave no tripulada, que comprende un conjunto de alojamiento, un conjunto de detección y un amortiguador […]
 AMORTIGUADOR DE MASA MAGNÉTICO DE RIGIDEZ VARIABLE, del 19 de Noviembre de 2012, de FUNDACION CARTIF: Amortiguador de masa magnético de rigidez variable basado en un dispositivo magnético formado por imanes permanentes y bobinas electromagnéticas, adaptable […]
AMORTIGUADOR DE MASA MAGNÉTICO DE RIGIDEZ VARIABLE, del 19 de Noviembre de 2012, de FUNDACION CARTIF: Amortiguador de masa magnético de rigidez variable basado en un dispositivo magnético formado por imanes permanentes y bobinas electromagnéticas, adaptable […]
 FRIGORIFICO, del 1 de Marzo de 2009, de BSH BOSCH UND SIEMENS HAUSGERATE GMBH: Frigorífico con un compresor y una cubierta para el alojamiento del compresor, en el que el compresor se sujeta en la cubierta por al menos una […]
FRIGORIFICO, del 1 de Marzo de 2009, de BSH BOSCH UND SIEMENS HAUSGERATE GMBH: Frigorífico con un compresor y una cubierta para el alojamiento del compresor, en el que el compresor se sujeta en la cubierta por al menos una […]