PROCEDIMIENTO PARA MEDIR LA DISTANCIA MEDIANTE MEDICIÓN DEL TIEMPO DE PROPAGACIÓN DE IMPULSOS LÁSER PARA VEHÍCULOS.
Procedimiento para medir distancias mediante la medición del tiempo de propagación de los impulsos láser para vehículos con un sensor de distancia que comprende - un sensor (1) con generador de pulsos (1A) conectado previamente para la generación de impulsos láser (L),
- un receptor (3) con circuito de medición del tiempo de propagación (3A) conectado posteriormente para la detección del impulso láser (RL) reflejado por un objetivo, caracterizado porque una pared de terminación (2) sólo casi totalmente transparente para la radiación láser se utiliza para el espacio de montaje en el que está dispuesto el sensor de distancia, pared que sirve para proteger el sensor de distancia ante aguas residuales, polvo, caída de piedras, etc. determinándose el tiempo de propagación de una parte (RT) del impulso láser (L) reflejada por esta pared de terminación (2) hacia el receptor (3) como señal de tiempo de referencia para la medición de la distancia
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E02005599.
Solicitante: HELLA KGAA HUECK & CO..
Nacionalidad solicitante: Alemania.
Dirección: RIXBECKER STRASSE 75 59552 LIPPSTADT ALEMANIA.
Inventor/es: Schellmann,Michael.
Fecha de Publicación: .
Fecha Solicitud PCT: 12 de Marzo de 2002.
Clasificación Internacional de Patentes:
- G01S17/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › que utilizan la transmisión de ondas discontinuas moduladas por pulsos (determinación de la distancia mediante mediciones de fase G01S 17/32).
- G01S7/497 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Medios para monitorización o calibración.
Clasificación PCT:
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356984_T3.pdf
Fragmento de la descripción:
La invención se refiere a un procedimiento para medir la distancia mediante la medición del tiempo de propagación de impulsos láser. Un aparato de medida (sensor de distancia) para la realización de este procedimiento se describe, por ejemplo, en el documento DE 30 20 996 A1. El impulso láser se genera por un láser semiconductorizado como emisor con generador de pulsos conectado anteriormente. El impulso láser reflejado por el objetivo del cual debe determinarse la 5 distancia al vehículo, se detecta de forma temporal por un fotodiodo, preferiblemente un fotodiodo de avalancha, con circuito de medición del tiempo de propagación conectado posteriormente. No obstante, entre la conexión (disparo) del generador de pulsos en el momento T0 y el envío del impulso láser en el momento TS como señal de inicio real se encuentra un tiempo de retardo ∆T = TS – T0. En este caso el tiempo de retardo depende principalmente de los componentes utilizados, en particular del generador de pulsos utilizado, desempeñando un papel también la elección del 10 láser semiconductorizado. Si este tiempo de retardo fuera constante, entonces no sería crítico ya que se podría determinar una vez y luego podría tenerse en cuenta en la medición del tiempo de propagación como valor de corrección. Por supuesto este no es el caso ya que este tiempo de retardo puede cambiar fuertemente en particular en el caso de oscilaciones de temperatura. Así el tiempo de retardo puede situarse en el rango de temperatura relevante para los vehículos al utilizar determinados componentes entre 100 y 200 nanosegundos, lo que significa una oscilación de 100 15 nanosegundos. Por consiguiente el momento de inicio y por consiguiente la medición del tiempo de propagación tendría una imprecisión de 100 nanosegundos, lo que significaría por último una inexactitud para la medición de la distancia de 15 m.
Por este motivo en el documento DE 30 20 996 A1 se propone desacoplar una parte del impulso láser a través de una fibra óptica en la dirección en el diodo receptor como señal inicial de referencia. No obstante, es muy cara y costosa la previsión 20 de una fibra óptica para esta finalidad.
Del documento DE 197 31 754 A1 se describe la integración del sensor de distancia descrito anterior en el faro de un vehículo. No obstante, allí no se aborda el problema de la determinación exacta del tiempo de inicio para la medición del tiempo de propagación.
El objetivo de la invención es crear un procedimiento para la medición de la distancia mediante la medición del tiempo de 25 propagación de impulsos láser para vehículos, que de manera sencilla, económica y segura permita una corrección del tiempo de retardo entre el disparo del generador de pulsos y el momento de salida de luz del impulso láser.
Para la solución de este objetivo se utiliza el hecho de que en la integración de un sensor de distancia del tipo mencionado anteriormente en un faro, el impulso láser debe pasar a través del cristal externo transparente para la radiación láser (mencionado también como cristal de dispersión). Para la invención el cristal externo ahora no es sólo un elemento de 30 diseño transparente – como en el caso del documento DE 197 31 754 A1. Mejor dicho según la invención se utiliza el conocimiento de que el cristal externo es sólo casi completamente transparente para la radiación láser, es decir, una pequeña parte del impulso láser se refleja por el cristal externo de vuelta al faro. Esta parte del impulso láser reflejada por el cristal externo alcanza también el diodo receptor – según han mostrado las mediciones – en el caso de característica de radiación correspondiente (rayo láser ligeramente divergente) y proximidad espacial suficiente entre láser de envío y diodo 35 receptor. Mientras que ahora la parte del impulso láser reflejada por el cristal externo se detecta de forma temporal, el momento de envío del impulso láser (momento de destello del láser) se determina exactamente, ya que el trayecto recorrido por el rayo láser reflejado es siempre igual del láser emisor a través del cristal externo al diodo receptor debido a la disposición geométrica fija.
Si la reflexión en el cristal externo no es suficientemente elevado al utilizar un cristal externo convencional, así en una 40 forma de realización está previsto utilizar un cristal externo que está configurado reflejando al menos localmente para la obtención de una elevada reflexión de una parte del impulso láser.
Alternativamente o adicionalmente a esta medida, en una forma de realización está previsto aumentar la sensibilidad del receptor en una ventana de tiempo determinada para detectar la recepción de una señal reflejada en el cristal externo con baja intensidad. 45
La idea que sirve de base a la invención no está limitada en la integración del sensor de distancia láser en un faro. La idea base consiste más bien en proveer el espacio constructivo en el que está dispuesto el sensor de distancia, con una pared de terminación (sólo) casi transparente para la radiación de láser, determinándose luego el tiempo de propagación de una parte del impulso láser reflejado por la pared de terminación hacia el receptor como señal de tiempo de referencia para la medición de la distancia. En general, si la longitud de onda del láser se sitúa fuera del rango espectral visible, la pared de 50 terminación no debe ser transparente para luz visible. La pared de terminación sirve para proteger el sensor de distancia frente a aguas residuales, polvo, caída de piedras, etc. Por consiguiente es posible entonces por ejemplo, la integración del sensor de distancia en el parachoques de un vehículo.
Mediante los dos dibujos adjuntos debe explicarse más en detalle la invención.
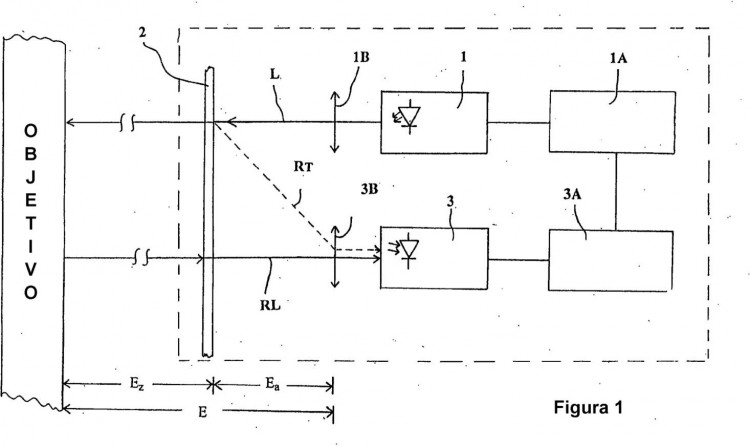
En la figura 1 está representado esquemáticamente el aparato de medida para la determinación de la distancia, con el que se realiza el procedimiento según la invención. La línea a trazos representa un faro en el que está integrado el aparato de medida. El aparato de medida (sensor de distancia) se compone de un láser semiconductorizado como emisor (1) para el impulso láser, cuyo tiempo de propagación se mide al reflejarse en un objetivo (Target) para la determinación de la distancia. Un generador de pulsos (1A) está conectado previamente al láser semiconductorizado (1). Detrás del verdadero 5 láser semiconductorizado (1) se sitúa una lente de desacoplamiento (1B), formando el láser semiconductorizado (1) y la lente de desacoplamiento (1B) preferiblemente una unidad que debe designarse como emisor (1). En un trayecto al objetivo, por ejemplo, un vehículo que circula delante, el impulso láser debe pasar el cristal externo (2). En este caso la distancia entre la lente de desacoplamiento (1B) del emisor (1) y el cristal externo (2) se designa como Ea. El impulso láser reflejado por el objetivo debe pasar ahora por su lado el cristal externo (2) y llega luego a través de una lente de 10 acoplamiento (3B) al diodo receptor (3). También aquí forman la lente de acoplamiento (3B) y el diodo receptor (3) preferiblemente una unidad. Un circuito (3A) para la medición del tiempo de propagación está conectado posteriormente al diodo receptor (3).
El modo de trabajo del aparato de medida es ahora como sigue:
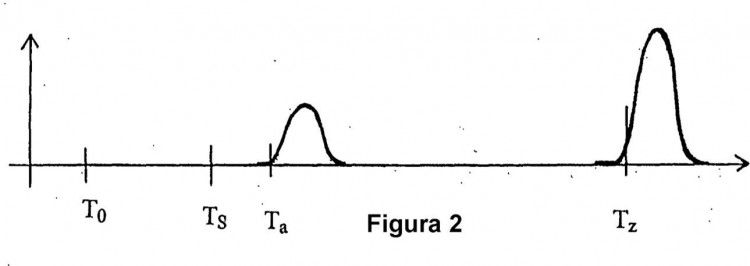
El generador de pulsos (A) genera el momento T0 una señal de disparo, por lo que se enciende el láser 15 semiconductorizado (1). La señal de disparo sirve al mismo tiempo para la activación de la medición del tiempo de propagación. Hablando gráficamente se pone a cero la hora interna del circuito de medición del tiempo de propagación (3A) y se conecta. Con un retardo temporal consabido sale luego el impulso láser en el momento TS del emisor (1). Entonces en el momento Ta se detecta por el circuito de medición del tiempo de propagación (3A) la parte (RT) del impulso láser (L) reflejada por el cristal externo (2) que ha llegado al diodo receptor (3). Un tiempo (TZ) consabido más 20 tarde se detecta luego la señal (RL) reflejada por el objetivo.
En la figura 2 están representados el transcurso temporal y los desarrollos de señales que han sido registrados por el circuito de medición del tiempo de propagación (3A). Según puede reconocerse claramente, la amplitud de la señal (RT) reflejada por el cristal externo (2) es esencialmente menor que la amplitud de la señal (RL) reflejada por el objetivo. En la forma de realización representada se memoriza un valor umbral (umbral de disparo) en el circuito de medición del tiempo 25 de propagación (3A), detectándose las señales... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para medir distancias mediante la medición del tiempo de propagación de los impulsos láser para vehículos con un sensor de distancia que comprende
- un sensor (1) con generador de pulsos (1A) conectado previamente para la generación de impulsos láser (L),
- un receptor (3) con circuito de medición del tiempo de propagación (3A) conectado posteriormente para la 5 detección del impulso láser (RL) reflejado por un objetivo,
caracterizado porque
una pared de terminación (2) sólo casi totalmente transparente para la radiación láser se utiliza para el espacio de montaje en el que está dispuesto el sensor de distancia, pared que sirve para proteger el sensor de distancia ante aguas residuales, polvo, caída de piedras, etc. 10
determinándose el tiempo de propagación de una parte (RT) del impulso láser (L) reflejada por esta pared de terminación (2) hacia el receptor (3) como señal de tiempo de referencia para la medición de la distancia.
2. Procedimiento según la reivindicación 1, caracterizado porque la sensibilidad del receptor (3) se aumenta dentro de una ventana de tiempo determinada para detectar una señal reflejada en la pared de terminación (2) con baja intensidad.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque la pared de terminación (2) se forma por el cristal 15 externo de un faro.
Patentes similares o relacionadas:
Sistema y método de medición de coordenadas, del 15 de Julio de 2020, de NPL Management Limited: Un sistema de deteccion de posicion para detectar la posicion tridimensional de una pluralidad de objetivos , que incluye: una pluralidad de objetivos […]
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Dispositivo optoelectrónico, del 6 de Noviembre de 2019, de VISHAY SEMICONDUCTOR GMBH: Dispositivo sensor optoelectrónico con: al menos un emisor optoelectrónico y al menos un receptor optoelectrónico , un medio de almacenamiento […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Procedimiento y dispositivo para asegurar un espacio atravesado por un haz láser de alta potencia, del 3 de Julio de 2019, de ArianeGroup SAS: Procedimiento para asegurar un espacio atravesado por un haz láser de alta potencia: caracterizado por que: • se genera al menos un haz […]
Procedimiento y dispositivo para la determinación de la posición de un sensor, del 17 de Mayo de 2019, de Carl Zeiss Optotechnik GmbH: Procedimiento para la determinación de la posición en el espacio de un sensor en diferentes posiciones de captación, en el que, para la determinación […]
Sistema de referencia de posición y método para posicionar y seguir uno o más objetos, del 1 de Mayo de 2019, de KONGSBERG SEATEX AS: Método para posicionar y seguir uno o más objetos por medio de una unidad de transceptor fijada a una plataforma del sensor, tal como un objeto o embarcación, y uno […]
Corrección de ganancia basada en una fuente de luz embarcada para buscadores de láser semi-activos, del 7 de Marzo de 2018, de BAE SYSTEMS INFORMATION AND ELECTRONIC SYSTEMS INTEGRATION, INC.: Un sistema de guiado de un vehículo que comprende: una fuente de luz de calibración a bordo del sistema de guiado de un vehículo, una pluralidad […]