MEDIDOR DE VELOCIDAD DE VEHICULOS POR ULTRASONIDOS DE ALTA EXACTITUD.
Sistema de estimación de velocidad de vehículos, que comprende una pluralidad n de dispositivos de medición (1) de velocidad,
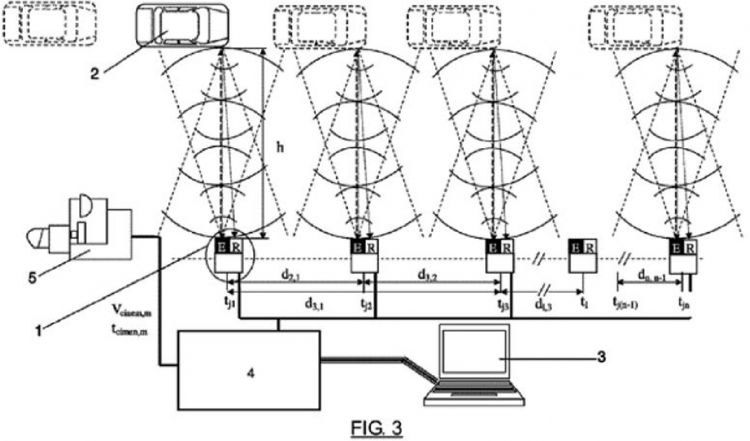
situados en un mismo eje a distancias conocidas, cada uno de ellos comprendiendo un emisor (E) de ultrasonidos configurado para generar una barrera de ultrasonidos y un receptor (R) de ultrasonidos configurado para captar los ecos cuando un vehículo (2) atraviesa la barrera de ultrasonidos; donde cada dispositivo de medición (1) de velocidad está configurado para obtener los instantes de recepción de los ecos. El sistema comprende unos medios de procesamiento (3) configurados para recibir los tiempos de recepción de los ecos, y realizar una estimación de la velocidad del vehículo.Adicionalmente estos medios (3) estarán configurados para sincronizar unas medidas tomadas por un cinemómetro externo (5) y estimar el error producido por dicho cinemómetro (5) mediante la introducción de un sistema de adquisición de datos (4) en el sistema
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200930409.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: DE FRUTOS VAQUERIZO,JOSE, MARCOS LUCAS,CARLOS, JIMENEZ MARTINEZ,FCO. JAVIER, PASTOR PAZ,CARLOS.
Fecha de Solicitud: 2 de Julio de 2009.
Fecha de Publicación: .
Fecha de Concesión: 21 de Enero de 2011.
Clasificación Internacional de Patentes:
- G01P3/64 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 3/00 Medida de la velocidad lineal o angular; Medida de diferencias de velocidades lineales o angulares (G01P 5/00 - G01P 11/00 tienen prioridad; midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00). › Dispositivos caracterizados por la determinación del tiempo empleado en recorrer una distancia constante.
- G01S15/58 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › Sistemas de determinación de velocidad o trayectoria; Sistemas de determinación del sentido del movimiento.
- G08G1/04 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › que utilizan detectores ópticos o ultrasónicos.
- G08G1/052 G08G 1/00 […] › con disposiciones para determinar la velocidad o el exceso de velocidad.
Clasificación PCT:
- G01P3/64 G01P 3/00 […] › Dispositivos caracterizados por la determinación del tiempo empleado en recorrer una distancia constante.
- G01S15/58 G01S 15/00 […] › Sistemas de determinación de velocidad o trayectoria; Sistemas de determinación del sentido del movimiento.
- G08G1/04 G08G 1/00 […] › que utilizan detectores ópticos o ultrasónicos.
- G08G1/052 G08G 1/00 […] › con disposiciones para determinar la velocidad o el exceso de velocidad.
Fragmento de la descripción:
Medidor de velocidad de vehículos por ultrasonidos de alta exactitud.
Campo de la invención
La presente invención pertenece al campo de la instrumentación electrónica, concretamente al campo de los equipos electrónicos de medida de velocidad y calibración.
Estado de la técnica
Actualmente los métodos utilizados para la obtención de medidas de referencia de la velocidad de un vehículo rodado en movimiento se basan en la tecnología láser y en el principio físico que contempla la medida del tiempo que tarda un móvil en recorrer una distancia conocida. En este contexto, existen dos técnicas ampliamente utilizadas.
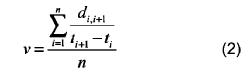
La filosofía de la primera de estas técnicas se describe en la Figura 1. Esta técnica consiste en la intercepción de dos barreras láser (1 y 2) por el vehículo en movimiento. Las barreras láser están separadas entre sí una distancia conocida db, y se registran los instantes de intercepción de ambas barreras t1 y t2. Dichas barreras se forman instalando un emisor de luz láser a un lado de la vía y un receptor o sensor láser al otro lado de la vía. Si se mide el tiempo entre intercepciones t2-t1 con la suficiente resolución se puede obtener una medida de la velocidad con suficiente exactitud como para ser usada como medida de referencia según la siguiente ecuación 1:

La filosofía de la segunda técnica se describe en la Figura 2. Consiste en colocar n sensores láser (n
Ambas metodologías presentan algunos problemas prácticos:
Es por tanto deseable un sistema que solucione los problemas propuestos.
Descripción de la invención
La presente invención resuelve los problemas existentes en el estado de la técnica mediante un sistema de estimación de velocidad de vehículos (VUAE) que es capaz de medir con exactitud la velocidad de un vehículo en movimiento, estimar el error de un cinemómetro externo por comparación y generar un informe de calibración. El VUAE es un sistema electrónico computerizado cuyo esquema de bloques se muestra en la Figura 3. El computador puede ser embebido, o no.
El VUAE está compuesto por n (n
La distancia entre cada E-Rult puede ser variable pero hay que superar un mínimo entre ellos. Esta distancia mínima debe ser tal que un E-Rult no pueda recibir ecos de una barrera generada por otro E-Rult adyacente. Esto implica que cuanto más estrecho sean los lóbulos de emisión y recepción de los E-Rult más cerca se podrán colocar entre sí los E-Rult.
En el VUAE también se dispone de un sistema de adquisición de datos (SAD) que se encarga de captar los instantes de llegada del eco y medir el tiempo entre instantes con suficiente exactitud, inferior a 0,1 μs, y de recoger las medidas del cinemómetro externo. El SAD introduce toda la información al computador.
Cabe destacar, que el VUAE evita algunos de los problemas descritos anteriormente en el estado de la técnica:
Las acciones que el VUAE realiza para estimar el error por comparación entre un cinemómetro externo y él mismo se muestran en la Figura 4 y se describe a continuación:
Reivindicaciones:
1. Sistema de estimación de velocidad de vehículos, caracterizado porque comprende:
sincronizar las medidas tomadas por el cinemómetro externo (5) y el sistema de estimación de velocidad y estimar el error generado por el cinemómetro externo (5).
2. Sistema de estimación de velocidad de vehículos, según la reivindicación 1, caracterizado porque los medios de procesamiento (3) están configurados, para la sincronización de las medidas tomadas por el cinemómetro externo (5) y el sistema de estimación de velocidad, para:
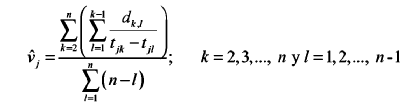
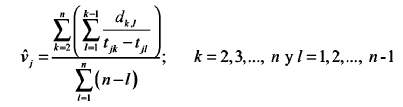
3. Sistema de estimación de velocidad de vehículos, según la reivindicación 2, caracterizado porque los medios de procesamiento (3) están configurados, para la búsqueda de la estimación de velocidad del vehículo j,
4. Sistema de estimación de velocidad de vehículos, según cualquiera de las reivindicaciones 2-3, caracterizado porque los medios de procesamiento (3) están configurados para contabilizar las medidas de velocidad vcinem,m del cinemómetro externo (5) que no tengan estimaciones de velocidad
5. Sistema de estimación de velocidad de vehículos, según cualquiera de las reivindicaciones 2-4, caracterizado porque los medios de procesamiento (3) están configurados para avisar de las anomalías encontradas durante la búsqueda de la estimación de velocidad para el vehículo j,
6. Sistema de estimación de velocidad de vehículos, según cualquiera de la reivindicaciones 2-5, caracterizado porque los medios de procesamiento (3) están configurados, para la estimación del error generado por el cinemómetro externo (5), para comparar las medidas obtenidas del cinemómetro externo (5) y del sistema de estimación de velocidad.
7. Sistema de estimación de velocidad de vehículos, según la reivindicación 6, caracterizado porque los medios de procesamiento (3) están configurados, para la estimación del error generado por el cinemómetro externo (5), para:
8. Procedimiento para la estimación de velocidad de vehículos, en el que se utiliza una pluralidad n de elementos de dispositivos de medición (1) de velocidad, situados en un mismo eje a distancias (d2.1, d3.2, ..., dn,n-1) conocidas, donde cada uno de ellos comprende un emisor (E) y un receptor (R) de ultrasonidos, caracterizado porque comprende las siguientes etapas:
9. Procedimiento para la estimación de velocidad de vehículos, según la reivindicación 8, caracterizado porque la etapa de sincronización de las medidas tomadas por el cinemómetro externo (5) y el sistema de estimación de velocidad comprende las siguientes etapas:
10. Procedimiento para la estimación de velocidad de vehículos, según la reivindicación 9, caracterizado porque la búsqueda de la estimación de velocidad del vehículo j,
11. Procedimiento para la estimación de velocidad de vehículos, según cualquiera de las reivindicaciones 9-10, caracterizado porque la etapa de sincronización de las medidas tomadas por el cinemómetro externo (5) y el sistema de estimación de velocidad comprende adicionalmente las siguientes etapas:
12. Procedimiento para la estimación de velocidad de vehículos, según cualquiera de las reivindicaciones 8-11, caracterizado porque la etapa de estimación del error generado por el cinemómetro externo (5) comprende la etapa:
13. Procedimiento para la estimación de velocidad de vehículos, según la reivindicación 12, caracterizado porque la estimación del error generado por el cinemómetro externo (5) comprende las siguientes etapas:
Patentes similares o relacionadas:
Procedimiento para generar un registro digital y una unidad de carretera de un sistema de peaje de carreteras que implemente el procedimiento, del 5 de Febrero de 2020, de KAPSCH TRAFFICCOM AG: Un procedimiento para generar un registro digital (E) de un vehículo en un sistema de peaje de carreteras , que comprende, en una unidad de carretera del sistema […]
DISTANCIÓMETRO VIAL, del 7 de Agosto de 2019, de ZAPATERO GARCIA, Julio: 1. Dispositivo de tráfico que se caracteriza por ir instalado en un vehículo informando sobre la distancia de seguridad que se lleva en cada momento con respecto […]
Sistema y método para medir el flujo del tráfico de un área, del 26 de Abril de 2019, de CUENDE INFOMETRICS, S.A.: Un sistema para estimar el flujo del tráfico real de un área, comprendiendo el sistema : • imágenes aéreas de un área tomadas a intervalos […]
Dispositivo de peaje o sistemas telemáticos, del 3 de Abril de 2019, de KAPSCH TRAFFICCOM AB: Método para controlar un sistema de peaje que comprende una pluralidad de sensores de imagen, que pueden combinar la información entre sí para estimar una altura, una […]
Procedimiento de control de un sistema de vigilancia de tráfico, del 18 de Marzo de 2019, de KAPSCH TRAFFICCOM AB: Procedimiento para controlar un sistema de vigilancia de tráfico, en el que el sistema tiene una pluralidad de sensores (100a-100d) estereoscópicos […]
Sistema y métodos para el soporte de vehículos autónomos por medio de la percepción ambiental y calibración y verificación de sensores, del 6 de Marzo de 2019, de Signify Holding B.V: Un sistema de soporte para vehículo autónomo caracterizado por que comprende: una red de iluminación que tiene: una pluralidad de unidades […]
Sistema de vigilancia del comportamiento del tráfico, del 8 de Noviembre de 2018, de KAPSCH TRAFFICCOM AB: Un método para supervisar el comportamiento del tráfico entre una pluralidad de vehículos por medio de un dispositivo de cámara estereoscópica conectado […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]