APARATO DE MOVILIZACIÓN CORPORAL GLOBAL Y UTILIZACIÓN DE DICHO APARATO.
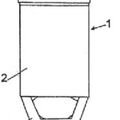
Aparato (1; 100) de movilización corporal global de un sujeto humano (2),
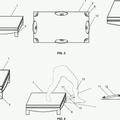
que comprende: - un chasis (10; 110) de apoyo fijo al suelo (S), - un plato (44; 112) de soporte del sujeto, desplazable con respecto al chasis, y - unos medios motorizados (18, 30, 32, 38; 114, 116) de arrastre del plato con respecto al chasis, en el que los medios de arrastre (18, 30, 32, 38; 114, 116) están adaptados, por una parte, para descentrar el plato con respecto a un eje fijo (Z-Z; W-W) sustancialmente vertical y, por otro lado para arrastrar el plato en rotación alrededor de este eje cuando el plato está descentrado, y en el que el disco (44;112) está provisto de unos medios periféricos (60, 62; 120, 122) de apoyo móvil sobre unos medios de soporte correspondientes (64; 841 a 845; 124) solidarios al chasis (10), estando adaptados estos medios de apoyo para hacer descansar el plato sobre el chasis inclinándolo de forma regulable con respecto a la horizontal en un plano (P) que pasa por el eje fijo (Z-Z; W-W) y una zona central del plato cuando los medios de arrastre descentran el plato con respecto a este eje
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2007/000947.
Solicitante: Genda Limited.
Nacionalidad solicitante: Irlanda.
Dirección: First Floor, Fitzwilton House Wilton Place Dublin 2 IRLANDA.
Inventor/es: TUDICO, GIANFRANCO.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Junio de 2007.
Clasificación Internacional de Patentes:
- A61H1/00C
- A61H1/00C2
- A63B22/14 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63B MATERIAL PARA LA EDUCACION FISICA, GIMNASIA, NATACION, ESCALADA O ESGRIMA; JUEGOS DE PELOTA; MATERIAL DE ENTRENAMIENTO (aparatos para gimnasia pasiva, masaje A61H). › A63B 22/00 Aparatos de ejercicio especialmente adaptados al entrenamiento del sistema cardiovascular, para ejercitar la agilidad o la coordinación de los movimientos (aspectos de resistencia A63B 21/00; controles eléctricos o electrónicos correspondientes A63B 24/00). › Plataformas para efectuar un movimiento alternativo en rotación alrededor de un eje vertical.
- A63B22/18 A63B 22/00 […] › con elementos que tienen un movimiento circular o rotativo engendrado por movimientos de oscilación del utilizador (aros deportivos A63B 19/00).
- A63B26/00B
Clasificación PCT:
- A61H1/00 A […] › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61H APARATOS DE FISIOTERAPIA, p. ej. DISPOSITIVOS PARA LOCALIZAR O ESTIMULAR LOS PUNTOS EN DONDE SE LOCALIZAN LOS CUERPOS; RESPIRACION ARTIFICIAL; MASAJE; DISPOSITIVOS DE BAÑO PARA USOS TERAPEUTICOS O HIGIENICOS PARTICULARES O PARA PARTES DETERMINADAS DEL CUERPO (electroterapia, magnetoterapia, radioterapia, terapia por ultrasonidos A61N). › Aparatos para el ejercicio pasivo (A61H 5/00 tiene prioridad ); Aparatos vibradores; Dispositivos quiroprácticos, p. ej. dispositivos para aplicar impactos al cuerpo, dispositivos externos para estirar o alinear de forma ligera los huesos no fracturados .
- A63B22/14 A63B 22/00 […] › Plataformas para efectuar un movimiento alternativo en rotación alrededor de un eje vertical.
- A63B26/00 A63B […] › Aparatos de ejercicio no cubiertos por los grupos A63B 1/00 - A63B 25/00.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2364591_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un aparato de movilización corporal global de un sujeto humano, es decir un aparato que permite poner en movimiento el tronco, los miembros y las articulaciones del sujeto, así como a una utilización de un aparato de este tipo.
Este tipo de aparato está destinado, preferentemente pero no exclusivamente, a ser utilizado bajo la supervisión de un fisioterapeuta que determina los movimientos de movilización generados por el aparato.
Estudios recientes en neurofisiología han revelado que la eficacia de los cuidados de fisioterapia u osteopatía, practicados por ejemplo sobre un sujeto herido, una persona envejecida o un sujeto sano, o incluso sobre un sujeto que practica deportes de alto nivel, está vinculada a la estimulación de las capacidades neurobiomecánicas del sujeto. En efecto, para mantenerse erguido y mandar sobre su cuerpo, el ser humano recibe informaciones mediante diferentes sensores, en particular sensores articulares, vestibulares, visuales, cutáneos, etc. El cerebro trata estas informaciones comparándolas con unos modelos internos, innatos y adquiridos, en función de los cuales el ser humano ajusta sus respuestas corporales. Sin embargo, estos modelos internos son a veces insuficientemente afinados para responder a situaciones nuevas, pudiendo algunos de estos modelos haberse perdido o no haber sido nunca adquiridos mediante el entrenamiento. Se comprende que de la riqueza de estos modelos depende la capacidad del sujeto para adaptarse a las dificultades del entorno en el que se desplaza y/o actúa. Además, para que las órdenes de control de los movimientos del cuerpo del sujeto dadas por su cerebro sean eficaces, las articulaciones del sujeto deben ser funcionalmente reactivas y los músculos que subtensionan estas articulaciones deben ser fuertes y flexibles. Sin embargo, una parte de las capacidades motrices del sujeto puede haberse perdido, en particular como consecuencia de un accidente, durante su envejecimiento, cuando adopta posturas de trabajo inadaptadas o cuando sufre una sobretensión nerviosa.
Se entiende así que la recuperación o el entrenamiento de las aptitudes neurobiomecánicas del sujeto necesitan unas estimulaciones y unas simulaciones conjuntas, tan completas y variadas como sea posible, de sus funciones musculo-articulares y de sus capacidades de neurovigilancia.
Los aparatos que permiten una recuperación de este tipo o un entrenamiento de este tipo son en la actualidad prácticamente inexistentes. Los pocos aparatos disponibles están generalmente constituidos por una plataforma motorizada, que a la vez descansa y oscila sobre un pivote central de apoyo, como en los documentos US-A-2.827.894 y US nº 4.313.603. Los movimientos de estas plataformas provocan un desequilibrio del cuerpo del sujeto que se encuentra sobre la plataforma e inducen de esta forma por parte de éste reacciones corporales. Sin embargo en la práctica, como todos los movimientos de movilización generados por estos aparatos se centran sobre su pivote central de apoyo, el cuerpo del sujeto no se desequilibra o se desequilibra débilmente: durante los movimientos del aparato, el polígono de sustentación del cuerpo del sujeto, es decir la superficie virtual comprendida entre los puntos de apoyo de los pies del sujeto erguido sobre la plataforma y en el interior de la cual debe proyectarse el centro de gravedad del cuerpo del sujeto para que este último no se desequilibre del todo y caiga, permanece centrado sobre el pivote central de apoyo. Dicho de otra forma, el eje sagital del cuerpo del sujeto permanece, globalmente, en la prolongación del pivote central de apoyo, lo cual solo permite una reacción corporal moderada, y siempre del mismo tipo. Además, el peso del sujeto y los esfuerzos que produce para no caer son encajados en su totalidad por el pivote central de apoyo, lo cual obliga, para limitar los riesgos de rotura, a fabricar este último en una forma particularmente resistente, en particular en forma de una junta de cardán. La fuerza motriz necesaria para el arrastre de la plataforma debe entonces ser dimensionada en consecuencia, lo cual se traduce en un aparato particularmente pesado y voluminoso.
El documento US-A-5.813.958 propone asimismo un aparato con plataforma motorizada oscilante, que, en ciertas formas de realización, integra un plato de soporte del sujeto, que presenta una inclinación prefijada de tal manera que el centro de este plato se encuentra descentrado en una distancia fija con respecto al eje vertical alrededor del cual gira el plato. En servicio, el desequilibrio del sujeto es más importante que con los aparatos mencionados anteriormente, pero debido a la fijeza de la inclinación del disco, relacionada con la propia estructura del aparato, los movimientos de movilización generados presentan una cinemática fija y por lo tanto poco eficaz y de pocas prestaciones, en el sentido en que el sujeto toma en cuenta rápidamente el descentrado fijo del plato para encontrar de nuevo rápidamente su equilibrio y neutralizar la estimulación neurobiomecánica suministrada por el aparato anticipando las características de esta estimulación. Además, la estructura del aparato ha resultado ser particularmente pesada y voluminosa, debido a la interposición entre el chasis del aparato y su plato de un disco rotativo sobre el cual el plato se apoya para ser inclinado de una forma prefijada.
El objetivo de la presente invención es proponer un aparato de movilización corporal global que, siendo fiable, ligero y poco voluminoso, permita a la vez desequilibrar el sujeto y desplazar significativamente el polígono de sustentación y los centros de presión instantáneos del cuerpo del sujeto, de forma eficaz y controlada, con el fin de actuar sobre el cuerpo según unos movimientos elaborados, para reforzar o entretener así las aptitudes neurobiomecánicas del sujeto.
Con este objetivo, la invención tiene por objeto un aparato de movilización corporal global de un sujeto humano, tal como el definido en la reivindicación 1.
Gracias al aparato según la invención, el centro del polígono de sustentación y los centros de presión instantáneos del cuerpo de un sujeto se pueden separar transversalmente del eje fijo definido por el aparato: cuando el sujeto se mantiene, en particular erguido, sobre el plato, su polígono de sustentación está centrado globalmente sobre la zona central del plato, mientras que esta última está prevista para poder ser descentrada con respecto al eje fijo. Este descentrado del disco se acompaña con una inclinación este último, mandada por los medios periféricos de apoyo de los cuales esta provisto el plato, lo cual provoca el desequilibrio del sujeto y la solicitación de sus capacidades neurobiomecánicas, como se ha explicado anteriormente. En servicio, cuando el plato es arrastrado de forma descentrada alrededor del eje fijo, el cuerpo del sujeto es movilizado por una fuerza centrífuga, según una dirección circunferencial acoplada a una movilización lineal en paralelo al plano del plato, relacionada con la inclinación de este último. Dicho de otra forma, el aparato según la invención produce unos movimientos controlados de su plato que desequilibran al sujeto, provocando un desplazamiento circunferencial y en traslación lateral del polígono de sustentación y de los centros de presión instantáneos del cuerpo del sujeto.
El efecto centrífugo de este desplazamiento se aplica en particular sobre todos los elementos corporales que componen el tronco cilíndrico constituido por el conjunto tronco/abdomen. La reacción a esta fuerza centrífuga es un potente esfuerzo de restauración centrípeta por el conjunto de todos los músculos del cuerpo.
El aparato según la invención realiza de esta forma una acción neurobiomecánica adaptada a la complejidad articular, muscular e informacional del cuerpo del sujeto, para darle, tanto como sea posible, todo su potencial dinámico o para empujarlo hacia sus límites neuromotrices de ajuste. En la práctica, el aparato genera diferentes tipos de acciones, tales como acciones vestibulares, articulares, cutáneas, posturales, musculares, neurológicas, genito-pélvicas, etc. En efecto, según los ajustes de los medios motorizados y según la postura del sujeto sobre el plato, se movilizan diversas zonas del cuerpo de forma coordinada, incluso todo el cuerpo. Cuando por ejemplo el sujeto se mantiene erguido sobre el plato, se pueden movilizar únicamente sus piernas, sus piernas y su tronco, o sus piernas, su tronco y sus brazos. Según el reclutamiento muscular ordenado, la movilización corporal se acompaña de una quema de calorías significativa.... [Seguir leyendo]
Reivindicaciones:
1. Aparato (1; 100) de movilización corporal global de un sujeto humano (2), que comprende:
- un chasis (10; 110) de apoyo fijo al suelo (S),
- un plato (44; 112) de soporte del sujeto, desplazable con respecto al chasis, y
- unos medios motorizados (18, 30, 32, 38; 114, 116) de arrastre del plato con respecto al chasis, en el que los medios de arrastre (18, 30, 32, 38; 114, 116) están adaptados, por una parte, para descentrar el plato con respecto a un eje fijo (Z-Z; W-W) sustancialmente vertical y, por otro lado para arrastrar el plato en rotación alrededor de este eje cuando el plato está descentrado, y en el que el disco (44;112) está provisto de unos medios periféricos (60, 62; 120, 122) de apoyo móvil sobre unos medios de soporte correspondientes (64; 841 a 845; 124) solidarios al chasis (10), estando adaptados estos medios de apoyo para hacer descansar el plato sobre el chasis inclinándolo de forma regulable con respecto a la horizontal en un plano (P) que pasa por el eje fijo (Z-Z; W-W) y una zona central del plato cuando los medios de arrastre descentran el plato con respecto a este eje.
2. Aparato según la reivindicación 1, caracterizado porque los medios periféricos de apoyo (60, 62; 120, 122) y los medios de soporte (64; 841 a 845; 124) están adaptados para hacer descansar el plato (44; 112) sobre el chasis (10;110) de forma sustancialmente horizontal cuando el plato está centrado sustancialmente sobre el eje fijo (Z-Z; W-W).
3. Aparato según una de las reivindicaciones 1 ó 2, caracterizado porque los medios de soporte (64; 841 a 845; 124) definen una superficie de envolvente (66) sustancialmente esférica, centrada sobre el eje fijo (Z-Z; W-W) y sobre al menos una parte (64A; 84A1 a 84A5; 124A) de la que los medios de apoyo (60, 62; 122) se apoyan de forma móvil.
4. Aparato según la reivindicación 3, caracterizado porque los medios de soporte comprenden una pluralidad de elementos de soporte (64; 841 a 845) distintos entre sí, repartidos de forma sustancialmente uniforme según una dirección periférica del chasis (10) y que delimitan cada uno una porción (64A; 84A1 a 84A5 ) de la superficie de envolvente (66).
5. Aparato según cualquiera de las reivindicaciones anteriores, caracterizado porque los medios de apoyo (60, 62) comprenden una pluralidad de elementos de apoyo (62) distintos entre sí, repartidos de forma sustancialmente uniforme siguiendo la periferia del plato (44) y adaptados respectivamente para apoyarse localmente sobre los medios de soporte (64).
6. Aparato según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende unos medios (90) de guiado de los medios de apoyo de apoyo (60, 62) con respecto a los medios de soporte (841 a 845), estando adaptados los medios de guiado para imponer a los medios de apoyo una trayectoria sustancialmente rectilínea (94) únicamente a nivel de una parte periférica del plato (44).
7. Aparato según las reivindicaciones 5 y 6 consideradas conjuntamente, caracterizado porque los medios de guiado (90) comprenden una ranura (92) de recepción de uno de los elementos de apoyo (62), adaptada para guiar este elemento según la trayectoria sustancialmente rectilínea (94).
8. Aparato según una de las reivindicaciones 6 ó 7, caracterizado porque los medios de guiado (90) son regulables, de manera que hacen variar la dirección de la trayectoria sustancialmente rectilínea (94) con respecto al eje fijo (ZZ).
9. Aparato según cualquiera de las reivindicaciones anteriores, caracterizado porque el disco (44;112) está provisto de medios (50; 138, 140) de unión articulada con los medios de arrastre (18, 30, 32, 38; 114, 116), adaptados para ser arrastrados de forma descentrada alrededor del eje fijo (Z-Z; W-W).
10. Aparato según la reivindicación 9, caracterizado porque los medios de unión articulada (50) están dispuestos a nivel de la zona central del plato (44).
11. Aparato según una de las reivindicaciones 9 ó 10, caracterizado porque los medios de unión comprenden al menos una rótula (50; 138, 140) alrededor de la cual el disco (44) está articulado libremente.
12. Aparato según cualquiera de las reivindicaciones anteriores, caracterizado porque los medios de arrastre comprenden un árbol rotativo (26) cuyo eje longitudinal constituye el eje fijo (Z-Z).
13. Aparato según la reivindicación 12, caracterizado porque los medios de arrastre comprenden además una deslizadera (30) de descentrado del plato (44) con respecto al eje fijo (Z-Z) , extendiéndose dicha deslizadera transversalmente al árbol rotativo (26) estando unida cinemáticamente a este árbol.
14. Aparato según la reivindicación 13 considerada en combinación con cualquiera de las reivindicaciones 9 a 11, caracterizado porque los medios de unión (50) están soportados por un carro (38) montado en traslación (T) a lo largo de la deslizadera (30) y mandado en desplazamiento por un accionador (32) soportado por la deslizadera.
15. Aparato según cualquiera de las reivindicaciones 9 a 14, caracterizado porque los medios de arrastre comprenden un primer motor eléctrico (20) cuya caja (22) es fija con respecto al chasis (10) y cuyo árbol de salida está unido cinemáticamente al árbol rotativo (26), un segundo motor eléctrico (32), cuya caja (34) está unida cinemáticamente al árbol rotativo y que está adaptado para mandar el descentrado del plato (44), y un colector (28)
10 que permite el paso de una corriente eléctrica del primer al segundo motor.
16. Aparato según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además unos medios de mando adaptados para regular, de forma combinada o disociada, a la vez la amplitud de descentrado del plato (44; 112) con respecto al eje fijo (Z-Z; W-W) y la velocidad de arrastre en rotación del plato alrededor de este
15 eje fijo.
Patentes similares o relacionadas:
Equipo de área recreativa, del 22 de Enero de 2020, de KOMPAN A/S: Equipo de área recreativa que comprende una plataforma en la que un usuario puede sentarse o estar de pie, estando configurada la plataforma […]
Aparato portátil de uso deportivo para el desarrollo muscular, del 13 de Diciembre de 2019, de SIMES MENDEZ, Elias: 1. Aparato portátil de uso deportivo para el desarrollo muscular que comprende un dispositivo portátil de materiales rígidos o semirrígidos, […]
Cámara de presión y elevador para sistema de presión de aire diferencial con capacidad de recogida de datos médicos, del 6 de Noviembre de 2019, de Alterg, Inc: Un sistema de ejercicio de presión de aire diferencial , que comprende: un marco que soporta un dispositivo de ejercicio y un panel de control […]
 Dispositivo para la práctica interactiva de videojuegos, del 26 de Junio de 2019, de BIGBEN INTERACTIVE SA: Dispositivo para la práctica interactiva de gimnasia en asociación con una unidad de tratamiento digital que ejecuta un programa de gimnasia que va […]
Dispositivo para la práctica interactiva de videojuegos, del 26 de Junio de 2019, de BIGBEN INTERACTIVE SA: Dispositivo para la práctica interactiva de gimnasia en asociación con una unidad de tratamiento digital que ejecuta un programa de gimnasia que va […]
Dispositivo para la posturografía, del 14 de Junio de 2019, de Sense Product GmbH: Dispositivo para la posturografía con una plataforma de medición , que presenta una superficie de apoyo para una persona de prueba, con un elemento de […]
Dispositivo, especialmente para el entrenamiento de equilibrio con al menos una plataforma móvil, del 7 de Junio de 2017, de Airbus Defence and Space GmbH: Dispositivo, en particular para en entrenamiento de equilibrio y/o entrenamiento de habilidades motrices, con al menos una plataforma móvil (12a-b), que es móvil […]
DISPOSITIVO DE EQUILIBRIO, del 11 de Agosto de 2011, de GEBRÜDER OBERMAIER OHG: Dispositivo de equilibrio que tiene un forro de cuerpo hueco, comprendiendo: - una región inferior . - una región superior , y - una región lateral […]
 DISPOSITIVO DIDACTICO PARA EL DESARROLLO DE LA CREATIVIDAD MOTRIZ, del 20 de Abril de 2010, de UNIVERSIDAD PABLO DE OLAVIDE: Dispositivo didáctico para el desarrollo de la actividad motriz.
El dispositivo consiste en un cuerpo monopieza fabricado mediante […]
DISPOSITIVO DIDACTICO PARA EL DESARROLLO DE LA CREATIVIDAD MOTRIZ, del 20 de Abril de 2010, de UNIVERSIDAD PABLO DE OLAVIDE: Dispositivo didáctico para el desarrollo de la actividad motriz.
El dispositivo consiste en un cuerpo monopieza fabricado mediante […]