VEHICULO AUTONOMO POLIVALENTE PARA TRABAJOS EN INVERNADERO.
Vehículo autónomo polivalente para trabajos en invernadero. El objeto de la invención es un vehículo que de forma autónoma puede moverse entre las líneas de cultivo en invernadero para realizar diferentes operaciones.
Está dotado de un chasis diseñado para poder recibir diferentes implementos, así como un punto de enganche en la parte trasera para el acoplamiento de máquinas y equipos. Dispone de un sistema de transmisión hidrostático controlado electrónicamente que permite mover el equipo en un rango de velocidades continuo para adaptarla convenientemente a las exigencias del trabajo, además de suministrar energía a los implementos que la requieran.
El movimiento del vehículo se consigue mediante el equilibrio dinámico de cada una de las orugas que componen el sistema de rodadura. Para ello dispone de un sistema sensorial compuesto por captadores de presión, codificadores incrementales y un radar.
El sistema sensorial del vehículo se completa con sensores de ultrasonido distribuidos por todo el perímetro (detección de obstáculos), una brújula magnética (orientación del vehículo) y sensores de seguridad (prevenir colisiones). La información suministrada por el sistema sensorial permite la localización y navegación del vehículo en el entorno de trabajo. Toda la información es gestionada por un sistema empotrado, donde se ejecutan los programas que controlan el vehículo.
El equipo también está dotado de una cámara multiespectral, adaptada para realizar un seguimiento continuo de determinados parámetros del cultivo, como pueden ser: detectar problemas fitosanitarios y de nutrición, controlar la evolución de la masa vegetal, localizar frutos, determinar la maduración de los frutos, etc
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200801645.
Solicitante: UNIVERSIDAD DE ALMERIA.
Nacionalidad solicitante: España.
Provincia: ALMERÍA.
Inventor/es: SANCHEZ HERMOSILLA LOPEZ,JULIAN, SANCHEZ GIMENO,ALFREDO, GUZMAN SANCHEZ,JOSE LUIS, RODRIGUEZ DIAZ,FRANCISCO, GONZALEZ SANCHEZ,RAMON, BERENGUEL SORIA,MANUEL.
Fecha de Solicitud: 19 de Mayo de 2008.
Fecha de Publicación: .
Fecha de Concesión: 18 de Agosto de 2010.
Clasificación Internacional de Patentes:
- A01B69/00 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01B TRABAJO DE LA TIERRA EN AGRICULTURA O EN SILVICULTURA; PARTES CONSTITUTIVAS O ACCESORIOS DE MAQUINAS O INSTRUMENTOS AGRICOLAS, EN GENERAL (apertura o recubrimiento de surcos o de hoyos para la siembra, plantación o abonado A01C 5/00; máquinas para la recogida de raíces o tubérculos A01D; segadoras convertibles en aparatos para trabajo de la tierra o capaces de trabajar la tierra A01D 42/04; segadoras combinadas con instrumentos para trabajo de la tierra A01D 43/12; trabajo de la tierra para obras públicas o explotaciones mineras E01, E02, E21). › Dirección de máquinas o instrumentos agrícolas; Guía de máquinas o instrumentos agrícolas según un recorrido determinado.
- B62D55/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00). › con orugas sin ruedas adicionales.
- G05D1/02E
Clasificación PCT:
- A01B69/00 A01B […] › Dirección de máquinas o instrumentos agrícolas; Guía de máquinas o instrumentos agrícolas según un recorrido determinado.
- B62D55/06 B62D 55/00 […] › con orugas sin ruedas adicionales.
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Fragmento de la descripción:
Vehículo autónomo polivalente para trabajos en invernadero.
Sector de la técnica
La presente invención se incluye dentro del sector de la industria auxiliar de agricultura en general, y más concretamente en el sector de la industria dedicado a la fabricación de máquinas y equipos para la realización de operaciones agrícolas.
Estado de la técnica
En la actualidad, existen diversas máquinas automotrices para la realización de operaciones en los cultivos en invernadero. La mayor parte de ellas están diseñadas para realizar una sola operación. Entre estas se encuentran los equipos que responden a la patente ES2154 1546B1, "Aplicadora autopropulsada de productos fitosanitarios para cultivos hortícolas con control mecánico o electrónico de la dosis", y al modelo de utilidad ES1048715 U, "Máquina autopropulsada para tratamientos fitosanitarios en cultivos intensivos". Se trata de equipos que solo permiten la realización de aplicaciones fitosanitarias, controlados de forma local por un operario. Un avance, en este sentido, es el "Robot autónomo para la aplicación de productos fitosanitarios" (Patente ES2155800B1) que permite realizar aplicaciones fitosanitarias sin la presencia del operario en el interior del invernadero, aunque sigue siendo una máquina que carece de polivalencia.
El documento de patente ES2208091B1 "Sistema robotizado para servicio en invernaderos", describe un equipo para trabajar en invernaderos movido por ruedas y accionado eléctricamente. Para tener una autonomía de trabajo adecuada con este tipo de accionamiento, se requiere un generador o un banco de baterías con un tamaño y peso que harían inviable el movimiento del equipo en el interior de invernadero. Este mismo inconveniente presenta el equipo propuesto en el documento de patente ES2156767A1 "Robot móvil traccionado por cadenas con capacidad de operación autónoma y teleoperada".
También existen algunos equipos polivalentes como el "Grupo de Tracción Articulado" correspondiente al Modelo de Utilidad ES10620959U, y la "Máquina para transporte y actividades agrícolas" definida en el modelo de utilidad ES1046855U, ambos vehículos apoyados sobre ruedas y que se controlan localmente.
Descripción de la invención
El vehículo autónomo polivalente para la realización de trabajos en invernadero que se propone en la presente invención, consiste en si mismo una evidente novedad en el campo de la máquinas empleadas en la realización de operaciones en invernaderos, ya permite disponer de un equipo que puede transportar y accionar diferentes implementos para realizar trabajos en el interior de los invernaderos sin la presencia de operarios, evitando operaciones peligrosas (aplicación de fitosanitarios), tareas rutinarias (control del cultivo) y reducir las horas de trabajo en un ambiente incómodo (alta temperatura y humedad).
El vehículo autónomo polivalente para la realización de trabajos en invernadero que se propone en la presente invención, es un vehículo compacto tiene como características principales una alta capacidad de maniobra para moverse con agilidad en entornos con un elevado número de obstáculos, baja compactación del suelo para no dificultar el desarrollo de los cultivos desde el punto de vista agronómico, una capacidad de carga suficiente para optimizar el rendi- miento del trabajo y una gran flexibilidad para adaptar la velocidad de trabajo a los requerimientos de cada operación.
El vehículo que se propone está dotado de un sistema de transmisión hidrostático controlado eléctricamente, con capacidad para suministrar energía a los implementos que la requieran (equipo pulverizador, plataforma elevadora,...) y accionado por un motor de combustión interna. De esta forma se consigue un vehículo de reducidas dimensiones, con una alta capacidad de carga en relación con su peso y con una gran autonomía de trabajo.
El equipo objeto de la invención también dispone de un sistema de dirección basado en el equilibrio dinámico de cada una de las orugas que componen el sistema de rodadura. Este sistema permite medir el par que está transmitiendo cada oruga al suelo, y de esta forma poder realizar un control más preciso de la trayectoria y de las condiciones de trabajo en suelos heterogéneos y cuando se trabaja con equipos en los que se producen importantes modificaciones de la carga, como puede ser un pulverizador para tratamientos fitosanitarios.
El vehículo se completa con un sistema sensorial que suministra información sobre variables operacionales (velocidad de trabajo, velocidad de las orugas, presión) y del entorno de trabajo, para una correcta localización del vehículo en el invernadero. Además dispone de un sistema de información, que permite controlar la evolución de variables relacionadas con el desarrollo del cultivo, así como problemas fitosanitarios o carencias nutritivas.
En general, destacar como ventajas de la invención que se propone las siguientes:
Descripción detallada de la invención
Para reunir las características mencionadas anteriormente, el vehículo autónomo polivalente que se propone en la presente invención está formado por un chasis de reducidas dimensiones, que dispone de un sistema porta-accesorios que permite el acoplamiento de diferentes equipos de trabajo. El chasis también dispone un sistema de enganche en la parte trasera para el arrastre de aquellos implementos que lo requieran.
El chasis se apoya sobre un sistema de rodadura, basado en orugas de caucho flexibles, que permiten repartir mejor el peso sobre el terreno, reduciendo la compactación del suelo y facilitando la movilidad en suelos muy sueltos.
La transmisión del movimiento hasta las orugas se realiza mediante un sistema hidrostático controlado electrónicamente. De esta forma el vehículo autónomo polivalente puede trabajar en un rango de velocidades continuo para adaptarse convenientemente a la exigencia de los diferentes trabajos que puede realizar. Además el sistema hidrostático permite el suministro de energía a aquellos implementos que lo requieran.
El vehículo está dotado de un sistema de dirección basado en el equilibrio dinámico de cada una de las orugas que componen el sistema de rodadura. Para ello dispone de un sistema sensorial compuesto por sensores de presión. Además para determinar la velocidad del vehículo en terrenos donde el deslizamiento es elevado se utilizan codificadores incrementales y un radar. Toda la información es gestionada por un sistema empotrado (basado en el estándar PC-104) donde se ejecutan los programas que controlan al vehículo. De esta forma tanto el control de las trayectorias como la uniformidad de las variables que definen el trabajo se pueden controlar con mayor precisión, sobre todo cuando se trabaja en suelos heterogéneos y se realizan trabajos en los que se produce una variación importante de la carga.
El sistema sensorial se completa con sensores de ultrasonidos distribuidos por toda la periferia del vehículo (detección de obstáculos en el entorno de trabajo), una brújula magnética (orientación), sensores de seguridad (prevenir colisiones) y una cámara hiperespectral que permite el seguimiento continuo de algunos parámetros relacionados con el desarrollo del cultivo, como pueden ser: detectar problemas fitosanitarios y de nutrición, controlar la evolución de la masa vegetal, localizar frutos, determinar la maduración de los frutos, etc.
Descripción de los dibujos
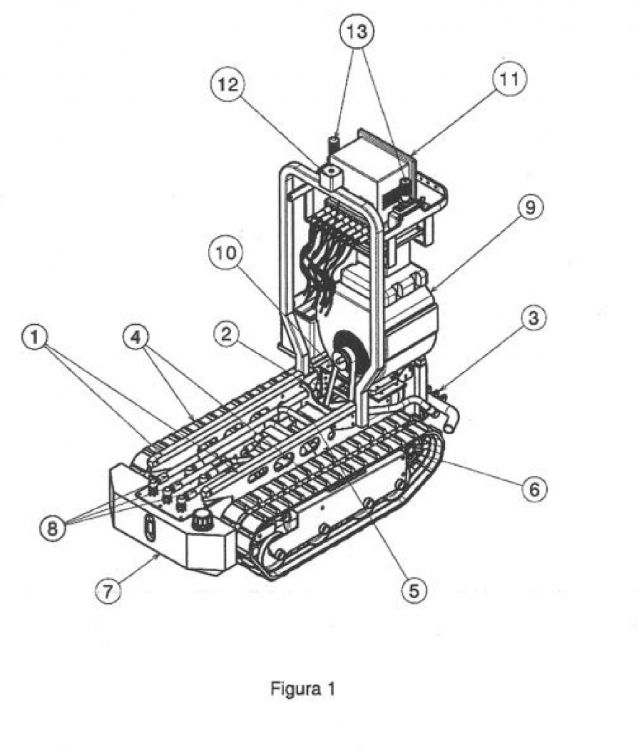
Figura 1 - muestra una vista en perspectiva esquemática de una realización preferente del vehículo autónomo polivalente para trabajos en invernadero de acuerdo con la presente invención, donde se puede observar la disposición de los principales elementos:
Reivindicaciones:
1. Vehículo autónomo polivalente para trabajos en invernadero, que comprende:
2. Vehículo autónomo polivalente para trabajos en invernadero según reivindicación 1 caracterizado porque el sistema porta-objetos está constituido por unas guías laterales sobre las que se apoyan los implementos de trabajo y un sistema de anclaje consistente en pernos autoblocantes.
3. Vehículo autónomo polivalente para trabajos en invernadero según reivindicaciones 1 y 2, caracterizado por disponer un sistema de direccionamiento basado en el equilibrio dinámico de cada oruga, formado por:
4. Vehículo autónomo polivalente para trabajos en invernadero según reivindicaciones 1, 2 y 3, caracterizado porque el sistema de localización relativo, está basado en un sistema de visión formado por cámaras de vídeo y un algoritmo que diferencia zonas de cultivo y zonas de no cultivo.
5. Vehículo autónomo polivalente para trabajos en invernadero según reivindicaciones 1 a 4, caracterizado porque el sistema de navegación es de tipo deliberativo, a partir de un mapa del invernadero.
6. Vehículo autónomo polivalente para trabajos en invernadero según reivindicaciones 1 a 4, caracterizado porque el sistema de navegación es de tipo reactivo basado en la determinación de la trayectoria a partir de la información suministrada por el sistema sensorial.
7. Uso del vehículo autónomo polivalente según reivindicaciones de 1 a 6 para detectar obstáculos.
8. Uso del vehículo autónomo polivalente según reivindicaciones de 1 a 7 para moverse autónomamente entre las líneas de cultivo y suministrar información del cultivo.
Patentes similares o relacionadas:
Dispositivo portaherramientas para facilitar la selección de filas, procedimiento de instalación y sistema agrícola asociados, del 25 de Marzo de 2020, de Solemat: 1. Dispositivo portaherramientas destinado a interponerse entre un tractor y una herramienta de viticultura o arboricultura, permitiendo dicho […]
Vehículo de trabajo, del 30 de Octubre de 2019, de YANMAR CO., LTD: Vehículo de trabajo configurado para trabajar mientras se desplaza, provisto de una máquina móvil y de una máquina de trabajo, que comprende: […]
DISPOSITIVO PALPADOR PARA DETECCIÓN DE POSTES METÁLICOS, del 10 de Octubre de 2019, de INDUSTRIAS DAVID, S.L.U: Dispositivo palpador para detección de postes metálicos, con al menos un primer mecanismo en un lateral de los medios de actuación de la máquina, que comprende […]
DISPOSITIVO PALPADOR PARA DETECCIÓN DE POSTES METÁLICOS, del 4 de Octubre de 2019, de INDUSTRIAS DAVID, S.L.U: Dispositivo palpador para detección de postes metálicos, con al menos un primer mecanismo en un lateral de los medios de actuación […]
Máquina teledirigida y/o autónoma para aplicación de fitosanitarios y tracción de aperos agrícolas, del 16 de Julio de 2019, de ROMERA MANZANO, Javier: 1. Máquina teledirigida y/o autónoma para aplicación de tratamientos fitosanitarios y tracción de aperos agrícolas caracterizada por un diseño modular compuesto […]
Sistema de comunicación inalámbrica para vehículos agrícolas, del 26 de Junio de 2019, de CNH Industrial Italia S.p.A: Un sistema de comunicación inalámbrica para coordinar el movimiento de una pluralidad de vehículos agrícolas, comprendiendo cada vehículo un sistema de posicionamiento […]
 Un método de control de las condiciones de conducción de un tractor de una máquina agrícola y una máquina agrícola, del 26 de Junio de 2019, de Kverneland Group Mechatronics BV: Método de control de las condiciones de conducción de un tractor de una máquina agrícola que tiene
- un tractor ;
- un apero para aplicar […]
Un método de control de las condiciones de conducción de un tractor de una máquina agrícola y una máquina agrícola, del 26 de Junio de 2019, de Kverneland Group Mechatronics BV: Método de control de las condiciones de conducción de un tractor de una máquina agrícola que tiene
- un tractor ;
- un apero para aplicar […]
VÁLVULA REGULADORA DE FRENO PARA REMOLQUE AGRÍCOLA, del 9 de Mayo de 2019, de ALIAGRO 2005, S.L: 1. Válvula reguladora de freno para remolque agrícola que se caracteriza porque comprende una válvula reductora de presión de dos vías y acción […]