SISTEMA MEDICO Y PIEZAS DEL SISTEMA PARA AJUSTAR ESPACIALMENTE UN DISPOSITIVO DE GUIADO RESPECTO A UN IMPLANTE CORPORAL.
Un dispositivo adaptador adaptado para ser conectado a un implante (210) corporal para establecer de forma desmontable una orientación espacial entre dicho implante (210) corporal y un dispositivo (280) de guiado,
en concreto entre un implante (210) de estabilización ósea y un dispositivo (280) de guiado para anclar el implante (210) a una parte interna del cuerpo, comprendiendo el dispositivo (321) adaptador:
un elemento (325a) de fijación, que está diseñado de forma que se puede enganchar un elemento (345a) de acoplamiento de un brazo (330) de posicionamiento al dispositivo (221) adaptador, y
un elemento (327) de inmovilización, que está diseñado de forma que un mecanismo (350) a presión del brazo (330) de posicionamiento se acopla automáticamente en el elemento (327) de inmovilización cuando el brazo (330) de posicionamiento, cuando se engancha en el dispositivo (321) adaptador, gira respecto al dispositivo (321) adaptador hacia una posición angular final; caracterizado porque el dispositivo (221) adaptador comprende un elemento (325b) de fijación adicional, que está diseñado de forma que se puede enganchar un elemento (345b) de acoplamiento adicional del brazo (330) de posicionamiento en el elemento (325b) de fijación adicional
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06008537.
Solicitante: STRYKER TRAUMA GMBH.
Nacionalidad solicitante: Alemania.
Dirección: PROF.-KUNTSCHER-STR. 1-5,24232 SCHONKIRCHEN/KIEL.
Inventor/es: CREMER, AXEL, PRIEN, OLE, GIERSCH,HELGE.
Fecha de Publicación: .
Fecha Solicitud PCT: 25 de Abril de 2006.
Fecha Concesión Europea: 28 de Abril de 2010.
Clasificación PCT:
- A61B17/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00).
- A61B17/17 A61B […] › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Dispositivos de guiado para taladros.
- A61B17/80 A61B 17/00 […] › Placas corticales.
- A61B17/88 A61B 17/00 […] › Medios o procedimientos para implantar o extraer los dispositivos de fijación interna.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Sistema médico y piezas del sistema para ajustar espacialmente un dispositivo de guiado respecto a un implante corporal.
Campo de la invención
La presente invención se refiere al campo del instrumental quirúrgico. En concreto, la presente invención se refiere a un sistema médico para establecer de forma desmontable una orientación entre un implante corporal y un dispositivo de guiado. Más concretamente, la presente invención se refiere a un sistema médico y a las piezas del sistema, lo que permite establecer de forma precisa una orientación espacial relativa entre un implante de estabilización ósea y un dispositivo de guiado para anclar el implante a una parte interna del cuerpo.
Antecedentes de la invención
Para posibilitar una estabilización fiable de un hueso roto en su posición normal, frecuentemente se usan implantes de estabilización ósea especiales. Tales implantes son, por ejemplo, placas de metal, que están hechas, por ejemplo, de acero quirúrgico. Tales placas generalmente se fijan a las partes del hueso por medio de tornillos roscados, que se introducen en el tejido óseo después de haber realizado orificios pre-perforados o pre-dirigidos. Estos orificios pre-perforados posibilitan un procedimiento de atornillado fiable, con lo cual el riesgo de destrucción adicional del hueso con el tornillo disminuye significativamente.
Para facilitar la perforación de estos orificios pre-perforados, son conocidos los denominados dispositivos de guiado, que funcionan como una plantilla de taladrado. En este contexto, se fija de forma desmontable un dispositivo de guiado a la placa de metal en una posición espacial precisa.
Los dispositivos de guiado también se usan junto con clavos de inmovilización, que se introducen en el tejido intramedular. De esta forma, la posición de un agujero transversal dentro del clavo de bloqueo se puede determinar de forma precisa. El agujero transversal está adaptado para alojar un tornillo de fijación, que se introduce transversalmente en la sección ósea correspondiente.
El documento US6.224.601B1 desvela el uso de un dispositivo de guiado en una osteosíntesis de forma auxiliar para el tratamiento de fracturas subtrocantéricas, peritocantéricas y del cuello femoral.
El documento US2004/0015174A1 desvela dispositivos según el preámbulo de las reivindicaciones 1 y 7.
Puede existir la necesidad de un sistema médico y de las piezas del sistema médico para ajustar espacialmente un dispositivo de guiado respecto a un implante corporal, lo que permite un ajuste de posición relativa fiable, sencillo y rápido.
Resumen la invención
Para cubrir la necesidad anteriormente definida se proporcionan un dispositivo adaptador, un brazo de posicionamiento y un sistema médico según las reivindicaciones independientes.
Según un aspecto de la invención, se proporciona un dispositivo adaptador adaptado para ser conectado a un implante corporal para establecer de forma desmontable una orientación espacial entre un implante corporal y un dispositivo de guiado, en concreto para establecer de forma desmontable una orientación espacial entre un implante de estabilización ósea y un dispositivo de guiado para anclar el implante a una parte interna del cuerpo. El dispositivo adaptador comprende un elemento de fijación, que está diseñado de forma que se puede enganchar un elemento de acoplamiento de este tipo de un brazo de posicionamiento al dispositivo adaptador. El dispositivo adaptador comprende además un elemento de inmovilización, que está diseñado de forma que un mecanismo a presión del brazo de posicionamiento se acopla automáticamente en el elemento de inmovilización cuando el brazo de posicionamiento, cuando se engancha en el dispositivo adaptador, gira respecto al dispositivo adaptador hacia una posición angular final y se acerca a la posición final. El dispositivo adaptador comprende un elemento de fijación adicional, que está diseñado de forma que se puede enganchar un elemento de acoplamiento adicional del brazo de posicionamiento en el elemento de fijación adicional. Esto puede tener la ventaja de que se genera automáticamente un cojinete de tres puntos mecánicamente estable cuando el mecanismo a presión del brazo de posicionamiento se acopla en el elemento de inmovilización.
Este aspecto de la presente invención está basado en la idea de que se pueden realizar una conexión tanto por ajuste de forma como por ajuste de fuerza entre el dispositivo adaptador y el posicionamiento si el brazo de posicionamiento oscila en torno a un centro de rotación predefinido hacia una posición angular final.
La conexión por ajuste de forma se puede proporcionar mediante el contorno del dispositivo adaptador, contorno que se ajusta de forma complementaria a un contorno proporcionado en el brazo de posicionamiento. Cuando el mecanismo a presión se acopla en el elemento de inmovilización, el contorno de dispositivo adaptador hace tope contra el contorno del brazo de posicionamiento de forma que se realiza una conexión por ajuste de forma.
La conexión por ajuste de fuerza se puede proporcionar si el dispositivo adaptador comprende una curvatura ligeramente diferente a la de la porción correspondiente del brazo de posicionamiento, porción que hace tope contra el dispositivo adaptador cuando el mecanismo a presión se acopla en el elemento de inmovilización. De esta forma, el dispositivo adaptador y/o el brazo de posicionamiento están hechos de un material que es al menos parcialmente elástico. Cuando se establece la conexión por ajuste de forma entre estas dos partes, al menos una de estas dos partes es elásticamente deformada, por lo que la fuerza de deformación proporciona la conexión por ajuste de fuerza. Una conexión por ajuste de fuerza de este tipo tiene la ventaja de que prácticamente no hay tolerancia espacial entre el dispositivo adaptador y el brazo de posicionamiento. Por tanto, se puede establecer un posicionamiento espacial en concreto muy preciso entre el dispositivo adaptador y el brazo de posicionamiento.
El mecanismo a presión del brazo de posicionamiento se acopla automáticamente en el elemento de inmovilización cuando el brazo de posicionamiento se ha acercado a la posición final. Durante todo el movimiento el dispositivo adaptador se mantiene enganchado en el dispositivo adaptador. La rotación se lleva a cabo alrededor de un eje de rotación, que atraviesa una región en la cual el elemento de fijación y el elemento de acoplamiento hacen tope entre sí.
El dispositivo adaptador está adaptado para ser conectado a un implante de estabilización ósea. El dispositivo adaptador y el implante pueden estar hechos como una sola pieza o como dos o más piezas individuales. Sin embargo, se tiene que garantizar que el dispositivo adaptador y el implante se puedan fijar rígidamente entre sí.
El brazo de posicionamiento está adaptado para ser conectado a un dispositivo de guiado. El brazo de posicionamiento y el dispositivo de guiado pueden estar hechos como una sola pieza o como dos o más piezas individuales. En este último caso también se tiene que garantizar que el brazo de posicionamiento y el dispositivo de guiado estén fijados rígidamente entre sí, de forma que el brazo de posicionamiento bloqueado por fricción y/o por forma proporcione una plataforma mecánicamente estable para el dispositivo de guiado.
Según una realización de la presente invención, el elemento de fijación es un saliente que sobresale de un cuerpo el dispositivo adaptador. Esto puede proporcionar la ventaja de que el dispositivo adaptador se puede fabricar fácilmente a partir de una única pieza de material.
Se debe señalar que el elemento de fijación puede ser cualquier elemento que permita que el brazo de posicionamiento se pueda enganchar en el dispositivo adaptador. Por ejemplo, el elemento de fijación puede ser también un rebaje, en el cual se acopla un elemento de acoplamiento saliente del brazo de posicionamiento.
Según una realización adicional de la invención el elemento de inmovilización comprende un borde. El borde puede ser elástico de forma que se pueda acoplar un elemento rígido o duro del mecanismo a presión. Alternativamente, el borde puede ser rígido de forma que se pueda acoplar un elemento elástico y/o flexible del mecanismo a presión. Un elemento elástico y/o flexible puede estar hecho de un material flexible o por medio de un elemento tipo muelle, que pre-tensiona el elemento elástico.
Además, cuando hay implicados dos elementos de fijación para proporcionar...
Reivindicaciones:
1. Un dispositivo adaptador adaptado para ser conectado a un implante (210) corporal para establecer de forma desmontable una orientación espacial entre dicho implante (210) corporal y un dispositivo (280) de guiado, en concreto entre un implante (210) de estabilización ósea y un dispositivo (280) de guiado para anclar el implante (210) a una parte interna del cuerpo, comprendiendo el dispositivo (321) adaptador:
un elemento (325a) de fijación, que está diseñado de forma que se puede enganchar un elemento (345a) de acoplamiento de un brazo (330) de posicionamiento al dispositivo (221) adaptador, y
un elemento (327) de inmovilización, que está diseñado de forma que un mecanismo (350) a presión del brazo (330) de posicionamiento se acopla automáticamente en el elemento (327) de inmovilización cuando el brazo (330) de posicionamiento, cuando se engancha en el dispositivo (321) adaptador, gira respecto al dispositivo (321) adaptador hacia una posición angular final; caracterizado porque el dispositivo (221) adaptador comprende un elemento (325b) de fijación adicional, que está diseñado de forma que se puede enganchar un elemento (345b) de acoplamiento adicional del brazo (330) de posicionamiento en el elemento (325b) de fijación adicional.
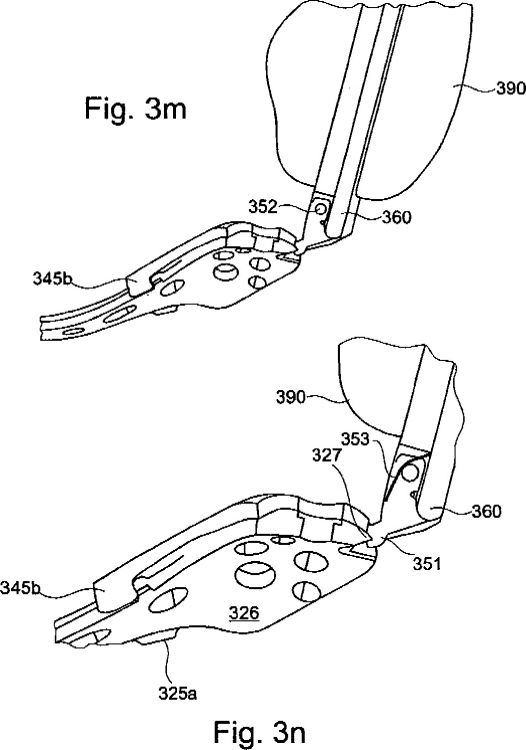
2. El dispositivo adaptador según la reivindicación 1, en el que el elemento (325a) de fijación es un saliente que sobresale de un cuerpo (326) del dispositivo (321) adaptador.
3. El dispositivo adaptador según una cualquiera de las reivindicaciones 1 a 2, en el que el elemento (327) de inmovilización comprende un borde.
4. El dispositivo adaptador según una cualquiera de las reivindicaciones 1 a 3, en el que el elemento (325b) de fijación adicional es un saliente adicional que sobresale de un cuerpo (326) del dispositivo (321) adaptador.
5. El dispositivo adaptador según una cualquiera de las reivindicaciones 1 a 4, en el que el dispositivo (221) adaptador está formado integralmente con el implante (210).
6. El dispositivo adaptador según una cualquiera de las reivindicaciones 1 a 4, en el que el dispositivo (221) adaptador está formado integralmente con un fijador (210) interno, en concreto, con una placa (210), que se usa para una estabilización ósea.
7. Un brazo de posicionamiento para establecer de forma desmontable una orientación espacial entre un implante (210) corporal y un dispositivo (280) de guiado, en concreto entre un implante (210) de estabilización ósea y un dispositivo (280) de guiado para anclar el implante (210) a una parte interna del cuerpo, comprendiendo el brazo (330) de posicionamiento:
un elemento (345a) de acoplamiento, que está diseñado para ser acoplado a un elemento (325a) de fijación de un dispositivo (321) adaptador adaptado para ser conectado a dicho implante (210) corporal de forma que el brazo (330) de posicionamiento se engancha en el dispositivo (321) adaptador, y
un mecanismo (350) a presión, que está diseñado para acoplarse automáticamente en un elemento (327) de inmovilización del dispositivo (321) adaptador cuando el brazo (330) de posicionamiento, cuando se engancha en el dispositivo (321) adaptador, gira respecto al dispositivo (321) adaptador hacia una posición angular final; caracterizado porque el brazo (230) de posicionamiento comprende
un elemento (345b) de acoplamiento adicional, que está diseñado para ser acoplado a un elemento (325b) de fijación adicional del dispositivo (321) adaptador.
8. El brazo de posicionamiento según la reivindicación 7, en el que el elemento (345a) de acoplamiento es una muesca.
9. El brazo de posicionamiento según una cualquiera de las reivindicaciones 7 a 8, en el que el mecanismo (350) a presión comprende un elemento (351) tipo gancho, que está adaptado para acoplarse con el elemento (327) de inmovilización.
10. El brazo de posicionamiento según una cualquiera de las reivindicaciones 7 a 9, en el que el elemento (345b) de acoplamiento adicional es una muesca adicional.
11. El brazo de posicionamiento según una cualquiera de las reivindicaciones 7 a 10, que comprende además un asa (290) para facilitar una rotación manual del brazo (330) de posicionamiento respecto al dispositivo (321) adapta- dor.
12. El brazo de posicionamiento según una cualquiera de las reivindicaciones 7 a 11, que comprende además un dispositivo (360) de bloqueo, adaptado para bloquear el mecanismo (350) a presión.
13. El brazo de posicionamiento según la reivindicación 12, en el que el dispositivo (360) de bloqueo comprende una palanca (295) giratoria.
14. El brazo de posicionamiento según una cualquiera de las reivindicaciones 7 a 13, en el que el brazo (330) de posicionamiento está formado integralmente con el dispositivo (280) de guiado.
15. El brazo de posicionamiento según una cualquiera de las reivindicaciones 7 a 13, en el que el brazo (330) de posicionamiento está adaptado para ser conectado de forma desmontable al dispositivo (280) de guiado.
16. Un sistema para establecer de forma desmontable una orientación espacial entre un implante (210) corporal y un dispositivo (280) de guiado, en concreto entre un implante (210) de estabilización ósea y un dispositivo (280) de guiado para anclar el implante (210) a una parte interna del cuerpo, comprendiendo el sistema:
un dispositivo (321) adaptador según una cualquiera de las reivindicaciones 1 a 6, y
un brazo (330) de posicionamiento según una cualquiera de las reivindicaciones 7 a 15.
Patentes similares o relacionadas:
 Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Adaptadores quirúrgicos para usar entre el conjunto de mango quirúrgico y las unidades de carga quirúrgica, del 22 de Julio de 2020, de Covidien LP (100.0%): Un conjunto adaptador para interconectar selectivamente una unidad de carga quirúrgica y un conjunto de mango que tiene al menos un […]
Sistemas para el tratamiento de enfermedades del ojo, del 22 de Julio de 2020, de ALCON, INC: Un dispositivo para tratar un ojo de mamífero que tiene un párpado , que comprende: un escudo escleral que puede posicionarse cerca de una superficie […]
Herramienta de pinza de agarre, del 22 de Julio de 2020, de COLOPLAST A/S: Herramienta de pinza de agarre para extraer una endoprótesis desde un paciente, que comprende: una carcasa de mango que forma una parte […]
Aparatos de grapado quirúrgico, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aparato de grapado quirúrgico , que comprende: una carcasa que tiene un actuador ; un miembro alargado que se extiende desde la carcasa; […]
Aplicadores que tienen sujetadores implantables para braquiterapia, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aplicador de sujetadores que comprende: una porción de cuerpo que incluye un conjunto de mango ; un conjunto […]
Interfaz de manipulador robótico para herramientas quirúrgicas articuladas, del 8 de Julio de 2020, de Microsure B.V: Interfaz de manipulador robótico para acoplar una herramienta quirúrgica articulada a un manipulador de un robot quirúrgico, comprendiendo […]
Implante quirúrgico para la reparación de la pared muscular, del 1 de Julio de 2020, de JOHNSON & JOHNSON MEDICAL GMBH: Un implante quirúrgico adaptado para reparar un defecto del tejido o de la pared muscular, que comprende una sección exterior y una sección interior (6; […]