Sistema quirúrgico asistido por ordenador.
Sistema quirúrgico asistido por ordenador que comprende:
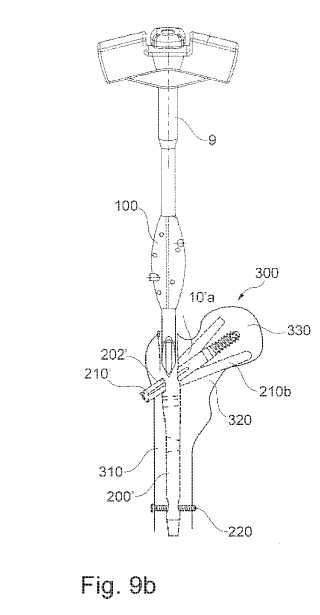
un cuerpo de referencia (100;
200) en relación con un fémur (300), representando el cuerpo de referencia de formavirtual una posición de un clavo intramedular y su tornillo óseo (200; 210, 220) a aplicar al fémur como estructuraanatómica
un dispositivo detector (3) que está adaptado para detectar una posición del cuerpo de referencia en relación con elfémur; detectar el cuerpo de referencia posicionado en relación con la estructura anatómica comprende tomar dosimágenes bidimensionales desde diferentes ángulos y generar una representación tridimensional en base a las dosimágenes bidimensionales, y determinar una posición espacial del cuerpo de referencia en relación con la estructuraanatómica en base a la representación tridimensional,
una base de datos (4) que incluye información sobre el clavo intramedular virtual y el tornillo óseo;
en el que la base de datos (4) incluye una pluralidad de conjuntos de datos para el clavo intramedular y su tornilloóseo (200; 210, 220), en el que los conjuntos de datos representan diversos clavos intramedulares y su tornillo óseo,un dispositivo de cálculo (5) que está adaptado para superponer la representación, con una representación virtual(200'; 210', 220') de un clavo intramedular y su tornillo óseo a aplicar en base a una emisión del dispositivo detector,y modificar de forma virtual la posición del cuerpo de referencia y optimizar la posición virtual del clavo intramedulary su tornillo óseo a aplicar con respecto al fémur para obtener un mejor ajuste con respecto a reglaspredeterminadas para intervalos admisibles para aplicar el clavo intramedular en relación con el fémur, en el quemodificar de forma virtual comprende seleccionar un clavo intramedular virtual (200; 210, 220) de la base de datosteniendo el clavo un orificio con una inclinación específica con respecto al eje longitudinal del clavo para alojar altornillo óseo,
para conseguir el correcto posicionamiento del tornillo óseo implantado más adelante, en el que la selección esllevada a cabo por el sistema quirúrgico asistido por ordenador cuando busca una geometría óptima en la base dedatos y propone el tipo respectivo de clavo intramedular.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10155104.
Solicitante: STRYKER TRAUMA GMBH.
Nacionalidad solicitante: Alemania.
Dirección: PROF.-KUNTSCHER-STR. 1-5 24232 SCHONKIRCHEN/KIEL ALEMANIA.
Inventor/es: SIMON, BERND, BLAU, ARNO, KOHNEN,MICHAEL DR, MÜLLER-DANIELS,HOLGER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/17 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Dispositivos de guiado para taladros.
- A61B19/00
- A61F2/46 A61 […] › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00). › Herramientas especiales para la implantación de articulaciones artificiales (instrumentos quirúrgicos A61B 17/00).
PDF original: ES-2425378_T3.pdf
Fragmento de la descripción:
Sistema quirúrgico asistido por ordenador
Campo de la invención
La presente invención se refiere a un sistema quirúrgico asistido por ordenador para hacer funcionar un sistema quirúrgico asistido por ordenador, y en particular a un sistema quirúrgico asistido por ordenador para hacer funcionar un sistema quirúrgico asistido por ordenador que proporciona una representación virtual de un dispositivo médico para proporcionar una aplicación más fácil del dispositivo médico, tal como un implante o similar.
Antecedentes de la invención
Las fracturas del cuello femoral, por ejemplo, pueden tratarse mediante enclavamiento intramedular. En dichos tratamientos, un clavo para enclavamiento intramedular típicamente comprende al menos una perforación para alojar a un tornillo óseo. El clavo se introduce generalmente en la dirección longitudinal del fémur, en la que el tornillo óseo se extiende lateralmente en cierto ángulo con respecto al cuello del fémur cuando el tornillo óseo está alojado en la al menos una perforación. Cierto problema para el cirujano es predecir la posición futura o implantada de dicho clavo o implante o partes del mismo. En el pasado, el operario actuaba de manera empírica para obtener una posición más o menos óptima del implante. Sin embargo, esto puede conducir a una mayor duración de la operación, lo que puede conducir a un mayor estrés para el paciente. Además, para cada ensayo, al menos una imagen de rayos X (por ejemplo una fotografía fluoroscópica) es necesaria generalmente para comprobar la posición actual del implante para evaluar su posición.
En los últimos años, la cirugía asistida por ordenador para tornillo dinámico de cadera ha sido descrita por Amir Herman et al., en el documento The International Journal of Medical Robotics and Computer Assisted Surger y , 29 de diciembre de 2008; Volumen 5, páginas 45-50, que describe un sistema quirúrgico asistido por ordenador que usa una tecnología de análisis de imágenes para medir distancias tridimensionales, visualizar plantillas de implante y ver una trayectoria guiada en fluoroscopia convencional. Un sistema de guiado combina un conjunto de marcadores opacos a los rayos X incorporados en instrumental transparente como un dispositivo de orientación, posicionamiento y referencia. Este dispositivo está unido a un alambre guía. El cirujano obtiene imágenes fluoroscópicas y a continuación éstas son procesadas por un motor de procesamiento de imágenes que calcula una orientación tridimensional con respecto un arco en C y una trayectoria de perforación en la imagen.
Además, un proceso para la adquisición de información destinada a la inserción de un tornillo de bloqueo en un orificio de un dispositivo endomedular se describe en el documento EP 1 491 151 B1. Este documento describe un proceso para la adquisición de información destinada a la inserción de un tornillo de bloqueo en un agujero de bloqueo distal de un dispositivo endomedular. El proceso descrito incluye tomar dos imágenes de diferentes orientaciones de la parte distal del dispositivo endomedular usando una unidad radioscópica, adquisición de parámetros de proyección, especialmente la posición de la fuente de rayos X y el plano de proyección de cada imagen ubicando un marco de referencia fijado en el dispositivo endomedular y opcionalmente otro marco de referencia fijado en la unidad radioscópica. El proceso incluye, además, corregir cualquier distorsión de las imágenes, segmentando la parte distal del dispositivo endomedular en cada imagen y calculando los atributos relacionados con la posición del dispositivo y con la de los agujeros, en el que los atributos comprenden al menos los contornos del dispositivo, su centro de gravedad y su eje principal. Además, el proceso incluye construir el cono de proyección de la parte distal del dispositivo para cada imagen, determinar la intersección de los dos conos de proyección, la construcción de modelos del dispositivo endomedular en base a la intersección, determinar un centro de un agujero de bloqueo con ayuda de la construcción de modelos y de los centros de gravedad de los agujeros determinados en las imágenes, determinar la orientación del orificio de bloqueo de manera alternativa, y guiado de una herramienta de perforación.
El documento WO 2009/087214 describe un método para asistir en cirugía y un sistema adaptado de forma correspondiente, incluyendo el método las etapas de tomar imágenes de una región de interés, procesar los datos de imagen para conseguir una visualización tridimensional de la región de interés, asociar una representación virtual de un dispositivo médico con la región de interés y mostrar la imagen resultante.
Sumario de la invención
La presente invención proporciona un sistema quirúrgico asistido por ordenador de acuerdo con la reivindicación 1, que permite un posicionamiento sencillo y rápido de un dispositivo médico a aplicar, tal como por ejemplo un implante.
Se proporciona un método para hacer funcionar un sistema quirúrgico asistido por ordenador, comprendiendo el método el posicionamiento de un cuerpo de referencia en relación con una estructura anatómica, representando el cuerpo de referencia de forma virtual una posición de un dispositivo médico a aplicar a la estructura anatómica, detectar una posición del cuerpo de referencia en relación con la estructura anatómica, superponer la estructura anatómica con una representación virtual de un dispositivo médico a aplicar en base a la posición detectada del cuerpo de referencia en relación con la estructura anatómica, proporcionar reglas para intervalos admisibles para aplicar el dispositivo médico en relación con la estructura anatómica, modificar la posición del cuerpo de referencia y optimizar la posición virtual del dispositivo médico a aplicar con respecto a la estructura anatómica para obtener un mejor ajuste con respecto a las reglas para intervalos admisibles.
De este modo, usando una representación virtual de un dispositivo médico a aplicar, puede predecirse una posición futura de un dispositivo médico real sin necesidad de insertar este dispositivo médico durante la fase de determinar la posición deseada final del dispositivo médico. De este modo, la posición del dispositivo médico puede optimizarse de forma virtual antes de insertar el dispositivo médico. Esto puede conducir a reducir el estrés para el paciente con respecto a una incisión y el impacto de los rayos X. La optimización puede incluir el descubrimiento de la ubicación, orientación y geometría óptimas del dispositivo médico, es decir el implante. Esta optimización puede tener lugar soportada por un dispositivo informático. El cuerpo de referencia puede ser un elemento añadido particular así como una herramienta médica que tenga una geometría única para identificar la posición de la misma en la adquisición de imágenes.
La posición de un dispositivo médico incluye dimensiones, ubicación y orientación del dispositivo médico.
De este modo, el dispositivo médico puede representarse de forma virtual considerando toda la información relevante con respecto a una estructura anatómica del paciente. La posición también puede ser la geometría del dispositivo médico, en particular entre una variedad predeterminada de dispositivos médicos.
Detectar el cuerpo de referencia posicionado en relación con una estructura anatómica comprende tomar dos imágenes bidimensionales desde diferentes ángulos y generar una representación tridimensional en base a las dos imágenes bidimensionales, y determinar una posición espacial del cuerpo de referencia en relación con la estructura anatómica en base a la representación tridimensional. Las dos imágenes bidimensionales pueden incluir la estructura anatómica que aloja al dispositivo médico. La posición del dispositivo médico en relación con la estructura anatómica puede basarse en la representación tridimensional.
De este modo, la estructura anatómica así como el implante virtual o el dispositivo médico virtual a aplicar puede representarse de manera tridimensional para dar una visión general sobre el correcto posicionamiento y dimensionamiento del dispositivo médico a aplicar.
Modificar puede comprender hacer girar y/o desplazar el cuerpo de referencia.
De este modo, el cuerpo de referencia que representa la posición del dispositivo médico está posicionado de forma virtual con respecto a la estructura anatómica para descubrir la posición optimizada del dispositivo médico posicionado en un futuro dentro de las reglas proporcionadas, en el que las reglas proporcionan los intervalos admisibles para aplicar el dispositivo médico en relación con la... [Seguir leyendo]
Reivindicaciones:
1. Sistema quirúrgico asistido por ordenador que comprende: un cuerpo de referencia (100; 200) en relación con un fémur (300) , representando el cuerpo de referencia de forma virtual una posición de un clavo intramedular y su tornillo óseo (200; 210, 220) a aplicar al fémur como estructura anatómica un dispositivo detector (3) que está adaptado para detectar una posición del cuerpo de referencia en relación con el fémur; detectar el cuerpo de referencia posicionado en relación con la estructura anatómica comprende tomar dos imágenes bidimensionales desde diferentes ángulos y generar una representación tridimensional en base a las dos imágenes bidimensionales, y determinar una posición espacial del cuerpo de referencia en relación con la estructura anatómica en base a la representación tridimensional, una base de datos (4) que incluye información sobre el clavo intramedular virtual y el tornillo óseo; en el que la base de datos (4) incluye una pluralidad de conjuntos de datos para el clavo intramedular y su tornillo óseo (200; 210, 220) , en el que los conjuntos de datos representan diversos clavos intramedulares y su tornillo óseo, un dispositivo de cálculo (5) que está adaptado para superponer la representación, con una representación virtual (200'; 210', 220') de un clavo intramedular y su tornillo óseo a aplicar en base a una emisión del dispositivo detector, y modificar de forma virtual la posición del cuerpo de referencia y optimizar la posición virtual del clavo intramedular y su tornillo óseo a aplicar con respecto al fémur para obtener un mejor ajuste con respecto a reglas predeterminadas para intervalos admisibles para aplicar el clavo intramedular en relación con el fémur, en el que modificar de forma virtual comprende seleccionar un clavo intramedular virtual (200; 210, 220) de la base de datos teniendo el clavo un orificio con una inclinación específica con respecto al eje longitudinal del clavo para alojar al tornillo óseo, para conseguir el correcto posicionamiento del tornillo óseo implantado más adelante, en el que la selección es llevada a cabo por el sistema quirúrgico asistido por ordenador cuando busca una geometría óptima en la base de datos y propone el tipo respectivo de clavo intramedular.
2. Sistema de la reivindicación 1, en el que el sistema comprende, además, una herramienta médica (10) que está adaptada para posicionar el clavo intramedular, en el que el cuerpo de referencia (100: 200) puede montarse de manera predefinida en la herramienta médica.
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]