METODO Y SISTEMA DE CONTROL DE SEMAFOROS PARA CONTROLAR LOS SEMAFOROS EN UNA PLURALIDAD DE INTERSECCIONES.
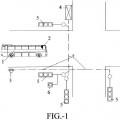
Sistema de control de semáforos para controlar los semáforos (4,
5, 6) en por lo menos una intersección (10, 11, 12,..., 26) basándose en la posición de un vehículo (1), que comprende:
- unos medios de conmutación para conmutar el estado de los semáforos (4, 5, 6),
- unos medios de determinación de la posición para determinar periódicamente la posición del vehículo (1),
- unos medios de control para controlar los medios de conmutación basándose en la posición determinada periódicamente del vehículo (1),
en el que los medios de control comprenden,
- una unidad (3) de control, ubicada remotamente con respecto al vehículo (1),
- unos primeros medios de comunicación entre la unidad de control y los medios de conmutación,
- unos segundos medios de comunicación entre los medios de determinación de la posición y la unidad de control,
- la unidad de control comprende un servidor que tiene una memoria, un espacio de almacenamiento, y una unidad procesadora,
- una base de datos está almacenada en el espacio de almacenamiento, comprendiendo dicha base de datos, datos de mapas que representan carreteras, semáforos e intersecciones en un área, y
- un programa está almacenado en el espacio de almacenamiento, estando dispuesto dicho programa para recibir la posición periódica del vehículo (1) y comparar la posición con los datos de mapas en la base de datos,
caracterizado porque,
- dicho programa comprende un programa de software GIS para determinar, basándose en la posición actual de dicho vehículo (1), qué intersección (10, 11, 12,..., 26) es la siguiente intersección a la que llegará el vehículo (1), y
- el software GIS determina intersecciones posteriores a las que es probable que llegue el vehículo (1) después de pasar por la siguiente intersección
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2006/050601.
Solicitante: SACS - SAFE CROSSING SOLUTION K/S.
Nacionalidad solicitante: Dinamarca.
Dirección: NDR. RINGVEJ 2,4800 NYKØBING F.
Inventor/es: OLSEN,JENS CHRISTIAN HØYBYE.
Fecha de Publicación: .
Fecha Concesión Europea: 4 de Noviembre de 2009.
Clasificación Internacional de Patentes:
- G08G1/087 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Intervención prioritaria sobre el control del tráfico, p. ej. por medio de una señal transmitida por un vehículo de socorro.
- G08G1/123M
Clasificación PCT:
Fragmento de la descripción:
Método y sistema de control de semáforos para controlar los semáforos en una pluralidad de intersecciones.
La presente invención se refiere a un sistema de control de semáforos para controlar los semáforos en por lo menos una intersección basándose en la posición de un vehículo, que comprende medios de conmutación para conmutar el estado de los semáforos, medios de determinación de la posición para determinar periódicamente la posición del vehículo, y medios de control para controlar los medios de conmutación basándose en la posición determinada periódicamente del vehículo, en el que los medios de control comprenden, una unidad de control, ubicada remotamente con respecto al vehículo, unos primeros medios de comunicación entre la unidad de control y los medios de conmutación, y unos segundos medios de comunicación entre los medios de determinación de la posición y la unidad de control, la unidad de control comprende un servidor que tiene una memoria, un espacio de almacenamiento, y una unidad procesadora, una base de datos está almacenada en el espacio de almacenamiento, comprendiendo dicha base de datos, datos de mapas que representan carreteras, semáforos e intersecciones en un área, y un programa está almacenado en el espacio de almacenamiento, estando dispuesto dicho programa para recibir la posición periódica del vehículo y comparar la posición con los datos de mapas en la base de datos.
Cuando se produce un accidente, un delito u otro suceso, cada segundo que tarda un vehículo de emergencia en llegar a la escena del suceso puede ser crítico. Además, para algunos vehículos de emergencia tales como ambulancias, es necesario transportar los heridos de gravedad lo más rápido posible desde la escena del suceso al hospital.
Como cada segundo cuenta, es importante que la ruta del vehículo de emergencia esté lo más despejada y libre posible. Especialmente en intersecciones en las que hay tráfico cruzado, que requiere una gran cantidad de atención se pueden perder segundos importantes debido a que el vehículo de emergencia tenga que decelerar o incluso detenerse.
Además, los estudios muestran que el número de accidentes en intersecciones en las que se ven implicados vehículos de emergencia es cada vez mayor.
Existe por lo tanto una necesidad de poder controlar los semáforos en las intersecciones cuando se aproxima un vehículo de emergencia de manera que el flujo de tráfico resulte ventajoso para la ruta del vehículo de emergencia.
Se conocen sistemas sencillos que intentan resolver esto, en los que, por ejemplo, se monta un transmisor en un vehículo de emergencia. Cuando el vehículo de emergencia se aproxima a una intersección, el transmisor transmite una señal hacia un receptor en la intersección. El receptor está en comunicación con los semáforos de la intersección, y cuando se recibe una señal de un vehículo de emergencia, todos los semáforos de la intersección comienzan a cambiar a rojo para detener el tráfico en la misma. No obstante, para evitar que cambien los semáforos en múltiples intersecciones, es necesario que el transmisor tenga un alcance limitado, y el mismo frecuentemente funciona solamente cuando está en línea de visión directa de la intersección correspondiente. Esto, con frecuencia, provoca que los semáforos cambien demasiado tarde y que el tráfico normal se vea atrapado en la intersección cuando llega el vehículo de emergencia. La patente US nº 4.443.783 describe un transmisor de este tipo en forma de un transmisor de radiocomunicaciones unidireccional y unos medios de recepción respectivos en las intersecciones.
En la patente US nº 5.014.052 se describe otra solución para controlar semáforos cuando un vehículo de emergencia se aproxima a una intersección. No obstante, es necesario que el conductor del vehículo de emergencia tenga conocimiento de los semáforos e intersecciones y es necesario que informe a un centro de control que controla los semáforos de la intersección, sobre la aproximación del vehículo de emergencia y cómo el vehículo entrará en y abandonará la intersección. Esto hace que el conductor deje de prestar atención al tráfico y aumentan los riesgos de un accidente.
El documento EP 0336256 da a conocer otra solución aplicada a autobuses.
Es por lo tanto deseable proporcionar un sistema de control de semáforos en el que no sea necesario que el conductor preste atención al sistema de control de semáforos para evitar accidentes debidos a la falta de concentración sobre el tráfico circundante del vehículo de emergencia.
A partir de la patente alemana publicada DE 198 42 912 B4 se conoce un sistema en el que se proporcionan medios de procesado en un vehículo de emergencia. Sobre la base de la información de posición recibida de un sistema GPS, los medios de procesado calculan una ruta desde el vehículo de emergencia a un punto de llegada, tal como un lugar de un accidente o un hospital. A través de medios de transmisión, el vehículo de emergencia avisa, a los semáforos de su ruta, de que el vehículo está de camino y le comunica a los semáforos que comiencen a cambiar a verde.
Si el vehículo de emergencia abandona la ruta, los medios de procesado calculan una ruta nueva, en la cual los semáforos nuevos se activan para cambiar a verde.
Se proporciona de este modo una onda verde para un vehículo de emergencia. No obstante, en caso de que cambie la ruta, se producirán situaciones en las que el vehículo de emergencia llegará a semáforos que no han tenido tiempo de cambiar ya que no ha transcurrido el tiempo suficiente para que los semáforos cambiasen completamente a verde o los semáforos puede que no hayan recibido todavía información para su conmutación debido a que la ruta nueva no ha sido actualizada.
Además, la disposición de los medios de procesado en el vehículo de emergencia dará como resultado un sistema caro, ya que cada vehículo tendrá que estar provisto de medios de procesado tales como un ordenador y el software requerido, incluyendo datos de mapas electrónicos exhaustivos que contengan datos sobre las intersecciones y la red de carreteras, etcétera. Por otra parte, como cada vehículo de emergencia se comunica con los diferentes semáforos, se requiere además un dispositivo de procesado en cada señal de tráfico por si se reciben, de varios vehículos de emergencias, comunicaciones e instrucciones que necesiten ser computarizadas.
De este modo, tal como puede entenderse, es necesaria una red compleja de muchos ordenadores para hacer funcionar un sistema según se describe en el documento DE 198 42 912 B4.
Además, la invención anterior requiere que se conozca un punto de llegada. Esto no es siempre posible. En el caso de una persecución policial en la que el delincuente esté escapando, por ejemplo, en coche, no se conoce ningún punto de llegada, ya que la ruta depende únicamente del delincuente. En este caso, la onda verde de semáforos es importante ya que reducirá el riesgo de que personas inocentes crucen una intersección por la que transcurra la persecución.
En un aspecto de la presente invención se proporciona un sistema de control de semáforos en el que no se requiere, del conductor del vehículo, atención sobre el sistema.
En un segundo aspecto de la presente invención se proporciona un sistema de control de semáforos, el cual puede proporcionar una onda verde de semáforos cuando la ruta del vehículo no se conozca por anticipado.
En un tercer aspecto de la presente invención se proporciona un sistema de control de semáforos, el cual es más económico y sencillo de instalar que otros sistemas conocidos.
Las características novedosas y exclusivas según la invención con las que se logra esto son el hecho de que dicho programa comprende un programa de software GIS para determinar, basándose en la posición actual de dicho vehículo, qué intersección es la siguiente intersección a la que llegará el vehículo, y el software GIS determina intersecciones posteriores a las que es probable que llegue el vehículo después de pasar por la siguiente intersección.
De este modo, el movimiento del vehículo de emergencia se puede monitorizar continuamente y los semáforos se pueden controlar de forma centralizada, basándose en dicho movimiento.
Usando componentes normalizados, la unidad de control central, en una forma de realización, puede comprender un servidor que tenga una memoria, un espacio de almacenamiento, y una unidad procesadora. En el espacio de almacenamiento, que...
Reivindicaciones:
1. Sistema de control de semáforos para controlar los semáforos (4, 5, 6) en por lo menos una intersección (10, 11, 12,..., 26) basándose en la posición de un vehículo (1), que comprende:
en el que los medios de control comprenden,
caracterizado porque,
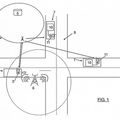
2. Sistema de control de semáforos según la reivindicación 1, caracterizado porque los medios de determinación de la posición comprenden un receptor GPS dispuesto en el vehículo (1), para recibir señales de satélites GPS (2).
3. Sistema de control de semáforos según cualquiera de las reivindicaciones 1 a 2, caracterizado porque dichos primeros y segundos medios de comunicación son de comunicación inalámbrica tal como el GPRS en una red GSM.
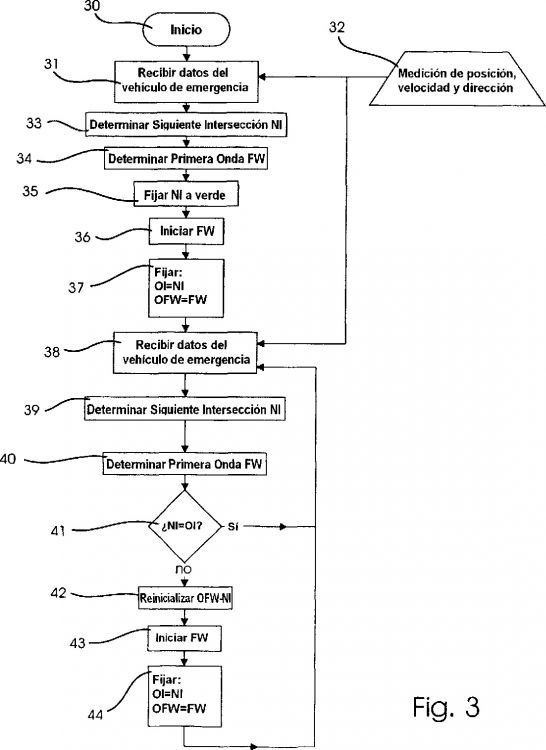
4. Método para controlar los semáforos (4, 5, 6) en por lo menos una intersección (10, 11, 12,..., 26) basándose en la posición de un vehículo (1), que comprende las etapas en las que,
caracterizado porque el método comprende además las etapas en las que,
5. Método según la reivindicación 4, caracterizado porque la etapa en la que se determina una siguiente intersección a la que llegará el vehículo (1) basándose en la posición determinada periódicamente comprende,
6. Método según la reivindicación 5, caracterizado porque la etapa en la que se determina la intersección posterior, que es la intersección a la que puede llegar el vehículo (1) después de pasar por la siguiente intersección, comprende,
7. Método según las reivindicaciones 4, 5 ó 6, caracterizado porque el control de los semáforos en dicha por lo menos una intersección (10, 11, 12,..., 26) se realiza usando una unidad (3) de control ubicada remotamente con respecto al vehículo (1).
Patentes similares o relacionadas:
Determinación de viaje para administrar horarios de vehículos de tránsito, del 3 de Julio de 2019, de Global Traffic Technologies LLC: Un procedimiento de administración de horarios de vehículos de tránsito, que comprende: determinar una ubicación actual y rumbo actual de un vehículo de tránsito mediante […]
APARATO Y SISTEMA DE CONTROL DE TRÁNSITO INTELIGENTE, del 22 de Diciembre de 2016, de MEDIA TRADE SOFTWARE, S.A. DE C.V: Se describe un aparato y sistema de control de tránsito inteligente. El aparato y sistema de control de tránsito inteligente de la presente invención […]
 Sistema interactivo para la prioridad semafórica aplicada a los servicios publicos, del 12 de Agosto de 2015, de MORENO LUZÓN, Jesús: Sistema interactivo para la prioridad semafórica aplicada a los servicios públicos, cuyo funcionamiento es el siguiente, el vehículo a priorizar […]
Sistema interactivo para la prioridad semafórica aplicada a los servicios publicos, del 12 de Agosto de 2015, de MORENO LUZÓN, Jesús: Sistema interactivo para la prioridad semafórica aplicada a los servicios públicos, cuyo funcionamiento es el siguiente, el vehículo a priorizar […]
 Método para controlar las señales de tráfico para dar prioridad de señalización a un vehículo, del 30 de Abril de 2012, de AB TRYGGIT: Un método para controlar las señales de tráfico con el fin de dar priorización de señalización a un vehículo que viaja a lo largo de […]
Método para controlar las señales de tráfico para dar prioridad de señalización a un vehículo, del 30 de Abril de 2012, de AB TRYGGIT: Un método para controlar las señales de tráfico con el fin de dar priorización de señalización a un vehículo que viaja a lo largo de […]
DETERMINACION AUTOMATICA DE PREFERENCIAS DE SEÑALES DE TRAFICO USANDO DIFERENCIALES GPS., del 1 de Agosto de 2003, de L & H COMPANY, INC.: UN SISTEMA DE PREFERENCIA PARA SEÑAL DE TRAFICO, Y UN METODO ASOCIADO PARA SU USO, UTILIZANDO MEDICIONES DE UN SISTEMA DE POSICIONAMIENTO GLOBAL DIFERENCIAL (GPS) […]
SISTEMA DE PRIORIDAD DE CONTROL DE TRAFICO BASADO EN GPS., del 16 de Enero de 1999, de MINNESOTA MINING AND MANUFACTURING COMPANY: UN SISTEMA DE PRIORIDAD PARA CONTROLAR EL TRAFICO UTILIZA LOS DATOS RECIBIDOS PROCEDENTES DE UNA RED DE SATELITES DE POSICIONAMIENTO GLOBAL (GPS), PARA […]
DETECTOR OPTICO DE LA PRIORIDAD DEL TRAFICO., del 16 de Abril de 1998, de MINNESOTA MINING AND MANUFACTURING COMPANY: SE PRESENTA UN DETECTOR OPTICO DE LA PRIORIDAD DEL TRAFICO COMO EL MOSTRADO EN LA FIGURA 2 PARA DETECTAR LOS IMPULSOS DE LUZ EMITIDOS POR UN VEHICULO DE EMERGENCIA […]
 METODO PARA LA MEJORA DEL TRANSITO DE VEHICULOS DE EMERGENCIA MEDIANTE EL USO DE BALIZAS, del 1 de Mayo de 2009, de VODAFONE ESPAA, S.A.: Método para la mejora del tránsito de vehículos de emergencia mediante el uso de balizas, en el que el vehículo de emergencia dispone de un terminal TE que […]
METODO PARA LA MEJORA DEL TRANSITO DE VEHICULOS DE EMERGENCIA MEDIANTE EL USO DE BALIZAS, del 1 de Mayo de 2009, de VODAFONE ESPAA, S.A.: Método para la mejora del tránsito de vehículos de emergencia mediante el uso de balizas, en el que el vehículo de emergencia dispone de un terminal TE que […]