DISPOSICION DE ASCENSOR.
Un método para vigilar la condición de una puerta automática en un edificio,
caracterizado porque el método comprende las operaciones de:
medir la aceleración o la velocidad de la puerta y el par de torsión de un motor de puerta que acciona la puerta;
crear un modelo dinámico de la puerta, que incluye como parte del mismo las fuerzas que actúan sobre la puerta;
crear un modelo de la aceleración o de la velocidad de la puerta utilizando el modelo dinámico de la puerta;
calcular un término de error como diferencia entre los valores medido y estimado de la aceleración o de la velocidad de la puerta;
calcular la fuerza de fricción aplicada a la puerta reduciendo al mínimo el antes citado término de error o una expresión derivada del mismo y que contenga el término de error; y
deducir la condición operativa de la puerta comparando la fuerza de fricción calculada y su cambio con valores de referencia
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FI2005/000025.
Solicitante: KONE CORPORATION.
Nacionalidad solicitante: Finlandia.
Dirección: KARTANONTIE 1,00330 HELSINKI.
Inventor/es: PERALA, PEKKA, TYNI,TAPIO.
Fecha de Publicación: .
Fecha Concesión Europea: 6 de Enero de 2010.
Clasificación Internacional de Patentes:
- B66B13/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › Puertas, barreras u otros aparatos que controlan el acceso o la salida de las cabinas o de los descansillos de cajas de ascensores.
- B66B5/00B
Clasificación PCT:
Clasificación antigua:
Fragmento de la descripción:
Disposición de ascensor.
Campo del invento
El presente invento se refiere a la gestión de fallos de una puerta controlada por ordenador en un sistema de ascensor o en otro sistema que contenga los componentes en cuestión.
Antecedentes del invento
Un sistema mecánico, en condiciones de funcionamiento normal comprende una cierta cantidad de fuerza de fricción debida al rozamiento que se opone al movimiento. Si las magnitudes de las fuerzas de fricción del sistema pueden determinarse midiéndolas o por métodos matemáticos, esta información puede utilizarse como indicador de la condición operativa del sistema.
Un sistema de ascensor contiene numerosos componentes que están expuestos a rozamiento y desgaste. El movimiento de la cabina del ascensor causa desgaste de los componentes incluyendo, por ejemplo, los cables del ascensor y los carriles de guía de la cabina del ascensor. Uno de tales componentes es la puerta del ascensor, que se mueve automáticamente por un carril horizontal. Sobre ella actúan fuerzas que le son aplicadas en distintas direcciones y tanto su borde superior como su borde inferior están en contacto con los carriles que hacen que el movimiento de la puerta se realice en su pista. También existe una fuerza de fricción que se opone al movimiento de la puerta automática. El funcionamiento de la puerta puede verse perturbado cuando en el carril del umbral de la puerta de la cabina del ascensor se ha acumulado suciedad en cantidad suficiente. Debido a esta obstrucción física, la fuerza que se opone al movimiento de la puerta puede crecer hasta un punto tal que, finalmente, el sistema de control de la puerta ya no sea capaz de abrir o de cerrar la puerta.
La magnitud de la fuerza de fricción no puede medirse directamente. No es posible montar en la puerta un "medidor de rozamiento" separado. La magnitud del rozamiento que se opone al movimiento de la puerta ha de medirse indirectamente. Es posible crear un modelo del sistema a examinar, en este caso la puerta del ascensor, con el fin de estudiar las fuerzas que se le aplican a la puerta. Una de las fuerzas que aparecen en el modelo es la fuerza de fricción que se opone al movimiento. Haciendo uso del modelo, es posible calcular los parámetros deseados cuando las magnitudes de las fuerzas que abren y cierran la puerta son conocidas y se mide la aceleración o la velocidad de la puerta. De este modo, pueden resolverse parámetros desconocidos, tales como la fuerza de fricción. Así, la cuestión que se plantea es un problema de optimización y estimación de parámetros.
Por ejemplo, en un sistema de ascensor el conjunto de la puerta consiste en una puerta de cabina que se mueve con la cabina y puertas de rellano en los distintos pisos. Una moderna puerta automática de ascensor es abierta y cerrada por medio de un motor de corriente continua. El par de torsión generado por el motor de corriente continua es directamente proporcional a la corriente del motor. La energía del motor es transmitida a la puerta, por ejemplo mediante una correa dentada, y la puerta se desplaza sobre rodillos. Por motivos de seguridad, la puerta de rellano solamente es cerrada sin motores, por medio de un dispositivo de cierre. La fuerza de cierre del dispositivo de cierre puede ser generada por un peso de cierre o un resorte helicoidal. La corriente del motor y el par correspondiente se miden en la placa de control de la puerta o, directamente, a partir de un conductor de la corriente del motor. También es posible vigilar una señal pulsatoria, denominada tacométrica, del motor. La señal tacométrica es una onda cuadrada cuya frecuencia depende de la velocidad del motor y, por tanto, de la velocidad de la puerta. Un ejemplo de un sistema de vigilancia de la puerta de la cabina de un ascensor se encuentra en el documento EP 0298784.
El problema con las soluciones de la técnica anterior es que la fuerza de fricción que actúa sobre la puerta del ascensor no puede medirse directamente. Se necesita utilizar un método indirecto de estimación de la magnitud de la fuerza de fricción. La magnitud de la fuerza de fricción es necesaria para conseguir una estimación del tiempo que transcurre hasta que falle la puerta o para predecir el momento futuro en el que la condición operativa de la puerta se deteriorará hasta un nivel consistente con un criterio dado.
Objeto del invento
El objeto del presente invento es detectar la condición operativa de una puerta eléctrica automática utilizada en un sistema de ascensor o en algún otro sistema, vigilando continuamente la magnitud de la fuerza de fricción que se opone al movimiento de la puerta.
Breve descripción del invento
El método y el sistema del invento se caracterizan por lo que se describe en las partes caracterizadoras de las reivindicaciones 1 y 8. Otras realizaciones del invento se caracterizan por el contenido de las otras reivindicaciones.
En la parte descriptiva de la presente solicitud se ofrecen, también, realizaciones inventivas. El contenido inventivo expuesto en la solicitud puede definirse, también, de formas diferentes a como se hace en las reivindicaciones siguientes. El contenido inventivo puede consistir, igualmente, en varios inventos separados, especialmente si se considera el invento a la luz de sub-tareas explícitas o implícitas o con respecto a ventajas o conjuntos de ventajas conseguidas. En este caso, algunos de los atributos contenidos en las adjuntas reivindicaciones, pueden resultar superfluos desde el punto de vista de los conceptos inventivos separados. Dentro del marco del concepto básico del invento, características de diferentes realizaciones del invento pueden aplicarse en conjunto con otras realizaciones.
El método del invento puede utilizarse para el examen, en tiempo real, de la condición de una puerta automática de un ascensor o, más generalmente, de una puerta automática de un edificio. En términos más precisos, una puerta automática es una puerta que deslice horizontalmente, controlada mediante un motor y cuyo movimiento de cierre puede ser asistido por un dispositivo de cierre. Sobre la puerta actúan diversas fuerzas de las que, en este momento, estamos particularmente interesados en la magnitud de la fuerza de fricción aplicada a la puerta. A partir de la fuerza de fricción, es posible deducir una necesidad urgente de mantenimiento y, en casos menos serios, la información relativa a la fuerza de fricción puede utilizarse del mejor modo para anticipar un momento futuro en el que, con la máxima probabilidad, empezarán a presentarse perturbaciones en el funcionamiento de la puerta. La condición operativa del dispositivo de cierre de la puerta puede determinarse en forma inmediata.
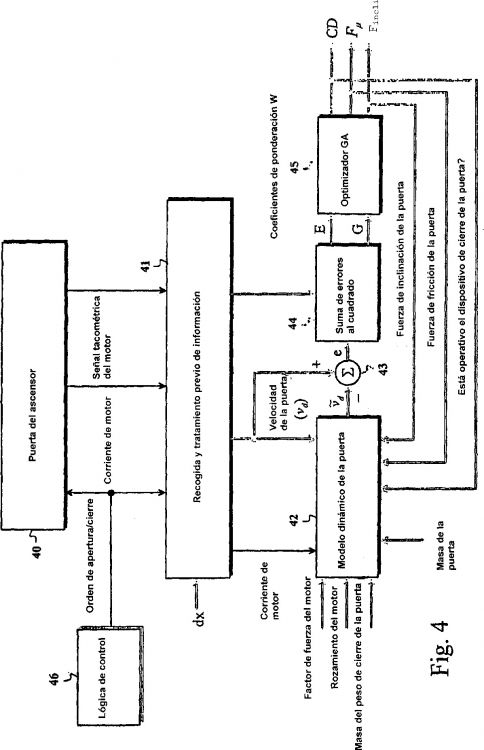
En una realización del método del presente invento, se mide la velocidad de la puerta automática. Esto puede conseguirse utilizando la denominada señal tacométrica obtenida del motor de la puerta. La señal tacométrica es una onda cuadrada en la que el espacio entre impulsos depende de la velocidad del motor y, por tanto, de la velocidad de la puerta. La velocidad de la puerta puede calcularse a partir de la señal tacométrica. Una parte esencial del método la constituye un modelo dinámico de la puerta. Algunos de los parámetros del modelo son actualizados después de cada secuencia pura de la puerta. Por secuencia pura de la puerta deben entenderse las operaciones de apertura y de cierre de la puerta durante las que no se producen re-aperturas durante el movimiento de cierre. El modelo incluye la puerta y el dispositivo de cierre y las fuerzas aplicadas a estas partes, incluyendo la fuerza de fricción. Empleando el modelo como ayuda, se estima la aceleración de la puerta y, a partir de ella, la velocidad de la puerta en función del tiempo. Se comparan las velocidades instantáneas medida y estimada y se obtiene un término de error. En cada instante, el término de error es función de tres variables (masa de la puerta, fuerza de fricción aplicada a la puerta, y fuerza resultante de la inclinación de la puerta). A continuación, se calcula la suma de los cuadrados de los términos de error, ponderándose cada cuadrado de un término de error mediante un coeficiente de ponderación deseado. Para el denominado término de error al cuadrado obtenido como resultado se halla un valor mínimo, en cuya situación los tres parámetros buscados del modelo son los que mejor responden a la realidad. A partir de la magnitud de la fuerza de fricción así obtenida, puede deducirse el presente estado de la condición operativa de la puerta.
En otra realización del método del presente invento, la aceleración de la puerta se mide...
Reivindicaciones:
1. Un método para vigilar la condición de una puerta automática en un edificio, caracterizado porque el método comprende las operaciones de:
medir la aceleración o la velocidad de la puerta y el par de torsión de un motor de puerta que acciona la puerta;
crear un modelo dinámico de la puerta, que incluye como parte del mismo las fuerzas que actúan sobre la puerta;
crear un modelo de la aceleración o de la velocidad de la puerta utilizando el modelo dinámico de la puerta;
calcular un término de error como diferencia entre los valores medido y estimado de la aceleración o de la velocidad de la puerta;
calcular la fuerza de fricción aplicada a la puerta reduciendo al mínimo el antes citado término de error o una expresión derivada del mismo y que contenga el término de error; y
deducir la condición operativa de la puerta comparando la fuerza de fricción calculada y su cambio con valores de referencia.
2. Un método de acuerdo con la reivindicación 1, caracterizado porque el método comprende, además, la operación de medir la aceleración de la puerta utilizando un perceptor de aceleración.
3. Un método de acuerdo con una cualquiera de las reivindicaciones 1-2 precedentes, caracterizado porque el método comprende, además, la operación de medir la velocidad de la puerta utilizando una señal proporcional a la velocidad, obtenida a partir del motor de la puerta.
4. Un método de acuerdo con una cualquiera de las reivindicaciones 1-3 precedentes, caracterizado porque el método comprende, además, las operaciones de:
utilizar como parámetros del modelo dinámico uno o más de los siguientes parámetros; velocidad de la puerta, corriente del motor de accionamiento de la puerta, coeficiente de par de torsión del motor, par de fricción del motor, factor de fuerza de un resorte de cierre de la puerta y masa de un peso de cierre de la puerta;
crear un modelo de la aceleración y la velocidad de la puerta en el modelo en función de uno o más parámetros, siendo estos parámetros la masa de la puerta, la fuerza de fricción aplicada a la puerta y la fuerza generada por el ángulo de inclinación de la puerta;
calcular una primera función de error como la diferencia entre una velocidad instantánea medida de la puerta y una velocidad instantánea de la puerta estimada en el modelo;
calcular una segunda función de error elevando al cuadrado la primera función de error y sumando las primeras funciones de error elevadas al cuadrado obtenidas durante un período dado de tiempo, utilizando coeficientes de ponderación deseados, calcular uno o más de los parámetros: masa de la puerta, fuerza de fricción aplicada a la puerta, y fuerza generada por el ángulo de inclinación de la puerta, reduciendo al mínimo la segunda función de error, y
alimentar los parámetros calculados de vuelta al modelo dinámico para uso en el siguiente ciclo de cálculo.
5. Un método de acuerdo con una cualquiera de las reivindicaciones 1-4 precedentes, caracterizado porque el método comprende, además, las operaciones de:
utilizar como parámetros en el modelo dinámico uno o más de los parámetros: aceleración de la puerta, corriente del motor de accionamiento de la puerta, coeficiente de par de torsión del motor, par de rozamiento del motor, factor de fuerza de un resorte de cierre de la puerta y masa de un peso de cierre de la puerta;
crear un modelo de la aceleración de la puerta en el modelo en función de uno o más parámetros, siendo estos parámetros la masa de la puerta, la fuerza de fricción aplicada a la puerta y la fuerza generada por el ángulo de inclinación de la puerta;
calcular una tercera función de error como la diferencia entre la aceleración instantánea medida de la puerta y la aceleración instantánea de la puerta estimada en el modelo;
calcular una cuarta función de error elevando al cuadrado la tercera función de error y sumando las terceras funciones de error elevadas al cuadrado obtenidas durante un período de tiempo dado, utilizando coeficientes de ponderación deseados;
calcular uno o más de los parámetros: masa de la puerta, fuerza de fricción aplicada a la puerta y fuerza generada por el ángulo de inclinación de la puerta, reduciendo al mínimo la cuarta función de error; y
alimentar los parámetros calculados de vuelta al modelo dinámico para uso en el siguiente ciclo de cálculo.
6. Un método de acuerdo con una cualquiera de las reivindicaciones 1-5 precedentes, caracterizado porque el método comprende, además, las operaciones de:
determinar el valor de la masa de la puerta en conexión con la puesta en marcha del sistema; y
definir la masa de la puerta como una constante en el modelo dinámico de la puerta.
7. Un método de acuerdo con una cualquiera de las reivindicaciones 1-6 precedentes, caracterizado porque el método comprende, además, las operaciones de:
utilizar un algoritmo genético para detectar un fallo del dispositivo de cierre de la puerta;
utilizar en el algoritmo genético un cromosoma que consiste en genes que describen el funcionamiento del dispositivo de cierre, la fuerza de fricción aplicada a la puerta y la fuerza generada por el ángulo de inclinación de la puerta;
utilizar una función de error al cuadrado como valor de calidad del algoritmo genético; y
utilizar el modelo dinámico de la puerta para determinar el fenotipo del algoritmo genético.
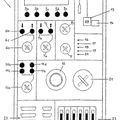
8. Un sistema para vigilar la condición de una puerta automática de un ascensor o de un edificio, comprendiendo dicho sistema:
al menos una puerta (20, 30, 40) que desliza horizontalmente en su lugar de montaje;
un sistema de control (26, 36, 46) para abrir y cerrar la puerta;
caracterizado porque el sistema, además, comprende:
medios (20, 30, 40) para medir la aceleración o la velocidad de la puerta y el par de torsión de un motor de accionamiento de la puerta;
un modelo dinámico (22, 32, 42) de la puerta, que incluye las fuerzas que actúan sobre la puerta;
medios (22, 32, 42) para crear un modelo de la aceleración o de la velocidad de la puerta utilizando el modelo dinámico de la puerta;
medios (23, 33, 43, 24, 34, 44) para calcular un término de error empleando información relativa a la aceleración o la velocidad de la puerta medidas y estimadas en el modelo;
medios (25, 35, 45) para calcular la fuerza de fricción aplicada a la puerta para reducir al mínimo el término de error antes mencionado o una expresión derivada de él y que contiene el término de error; y
medios (26, 35, 46) para deducir la condición operativa de la puerta para comparar la fuerza de fricción medida y su cambio con valores de referencia.
9. Un sistema de acuerdo con la reivindicación 8, caracterizado porque el sistema comprende, además:
una placa (26, 36, 46) de control de la puerta como sistema de control de la puerta.
10. Un sistema de acuerdo con una cualquiera de las reivindicaciones 8-9 precedentes, caracterizado porque el sistema comprende, además:
un perceptor de aceleración (30, 40) como medios de medición de la aceleración de la puerta.
11. Un sistema de acuerdo con una cualquiera de las reivindicaciones 8-10 precedentes, caracterizado porque el sistema comprende, además:
una señal (20) proporcional a la velocidad y obtenida a partir del motor de la puerta, utilizada como medios de medición de la velocidad vd de la puerta.
12. Un sistema de acuerdo con una cualquiera de las reivindicaciones 8-11 precedentes, caracterizado porque el sistema comprende, además:
medios para determinar uno o más parámetros del modelo dinámico (22) mediante operaciones que incluyen la medición de la velocidad vd de la puerta, la medición de la corriente del motor de accionamiento de la puerta, la determinación del coeficiente del par de torsión del motor, la determinación del par de rozamiento del motor, la determinación del factor fuerza de un resorte de cierre de la puerta, y la medición de la masa de un peso de cierre de la puerta;
medios para crear un modelo de la velocidad de la puerta en el modelo dinámico (22), definiéndose dicha velocidad como función de uno o más parámetros, siendo estos parámetros la masa de la puerta, la fuerza de fricción aplicada a la puerta y la fuerza generada por el ángulo de inclinación de la puerta;
medios (23) para calcular una primera función de error, obteniéndose dicha función como la diferencia entre una velocidad instantánea medida de la puerta y una velocidad instantánea de la puerta estimada en el modelo;
medios (24) para calcular una segunda función de error, obteniéndose dicha segunda función de error elevando al cuadrado la primera función de error (23) y sumando las primeras funciones de error elevadas al cuadrado obtenidas durante un período de tiempo dado, utilizando coeficientes de ponderación (21) deseados;
primeros medios de optimización (25) para reducir al mínimo la segunda función de error (24), resolviendo uno o más de los parámetros: masa de la puerta, fuerza de fricción aplicada a la puerta y fuerza generada por el ángulo de inclinación de la puerta; y
primeros medios de realimentación para hacer pasar los parámetros calculados al modelo dinámico (22) para uso en el siguiente ciclo de cálculo.
13. Un sistema de acuerdo con una de las reivindicaciones 8-12 precedentes, caracterizado porque el sistema comprende, además:
medios para determinar uno o más parámetros del modelo dinámico (32) mediante operaciones que incluyen la medición de la aceleración de la puerta, la medición de la corriente del motor de accionamiento de la puerta, la determinación del coeficiente de par de torsión del motor, la determinación del par de rozamiento del motor, la determi- nación del factor fuerza de un resorte de cierre de la puerta, y la medición de la masa de un peso de cierre de la puerta;
medios para crear un modelo de la aceleración de la puerta en el modelo dinámico (32), definiéndose dicha aceleración como función de uno o más parámetros, siendo estos parámetros: la masa de la puerta, la fuerza de fricción aplicada a la puerta y la fuerza generada por el ángulo de inclinación de la puerta;
medios (33) para calcular una tercera función de error, obteniéndose dicha función de error como la diferencia entre la aceleración instantánea medida de la puerta y la aceleración instantánea de la puerta estimada en el modelo;
medios (34) para calcular una cuarta función de error, obteniéndose dicha cuarta función de error elevando al cuadrado la tercera función de error (33) y sumando las terceras funciones de error elevadas al cuadrado obtenidas durante un período de tiempo dado, utilizando coeficientes de ponderación (31) deseados;
segundos medios de optimización (35) para reducir al mínimo la cuarta función de error (34), resolviendo uno o más de los parámetros: masa de la puerta, fuerza de fricción aplicada a la puerta y fuerza generada por el ángulo de inclinación de la puerta; y
segundos medios de realimentación para hacer pasar los parámetros calculados al modelo dinámico (32) para uso en el siguiente ciclo de cálculo.
14. Un sistema de acuerdo con una cualquiera de las reivindicaciones 8-13 precedentes, caracterizado porque el sistema comprende, además:
terceros medios de optimización (45) para utilizar un algoritmo genético para detectar un fallo del dispositivo de cierre de la puerta;
estando destinados los terceros medios de optimización (45) antes mencionados a utilizar uno o más parámetros en el algoritmo genético como genes de un cromosoma, siendo estos parámetros el funcionamiento del dispositivo de cierre, la fuerza de fricción aplicada a la puerta y la fuerza generada por el ángulo de inclinación de la puerta;
estando destinados los terceros medios de optimización (45) antes mencionados a utilizar una función de error al cuadrado (44) como valor de calidad del algoritmo genético; y
estando destinados los terceros medios de optimización (45) antes mencionados a utilizar el modelo dinámico (42) de la puerta para determinar el fenotipo del algoritmo genético.
Patentes similares o relacionadas:
PLATAFORMA ABATIBLE EXTERNA PARA ENTRADA/SALIDA EN ASCENSORES., del 3 de Febrero de 2017, de SALLERAS HERMANOS, S.L: 1. Plataforma abatible externa para entrada/salida en ascensores, específicamente concebida para ser instalada en posiciones previamente establecidas de tramos […]
 Unidad de accionamiento para puertas, especialmente puertas de ascensor que no tienen un perfil rectilíneo, del 30 de Marzo de 2012, de SEMATIC S.p.A: Unidad de accionamiento para puertas, especialmente puertas de ascensor que no tienen un perfil rectilíneo, formada por batientes alineados (24, 24', 26, 26') o batientes […]
Unidad de accionamiento para puertas, especialmente puertas de ascensor que no tienen un perfil rectilíneo, del 30 de Marzo de 2012, de SEMATIC S.p.A: Unidad de accionamiento para puertas, especialmente puertas de ascensor que no tienen un perfil rectilíneo, formada por batientes alineados (24, 24', 26, 26') o batientes […]
MARCO PRECABLEADO DE PUERTA DE ASCENSOR, del 1 de Octubre de 2005, de OTIS ELEVATOR COMPANY: Marco precableado de puerta de ascensor. Un sistema de ascensor incluye conjuntos de marco de puerta que están precableados con la pluralidad de hilos necesarios para hacer […]
 ASCENSOR QUE UITLIZA DISPOSITIVOS DE IDENTIFICACIÓN DE RADIOFRECUENCIA (RFID), del 25 de Mayo de 2011, de OTIS ELEVATOR COMPANY: Cadena de seguridad de ascensor para monitorizar el estado de una pluralidad de parámetros relacionados con la seguridad de un ascensor, incluyendo dichos […]
ASCENSOR QUE UITLIZA DISPOSITIVOS DE IDENTIFICACIÓN DE RADIOFRECUENCIA (RFID), del 25 de Mayo de 2011, de OTIS ELEVATOR COMPANY: Cadena de seguridad de ascensor para monitorizar el estado de una pluralidad de parámetros relacionados con la seguridad de un ascensor, incluyendo dichos […]
 DISPOSITIVO DE ACCESO PARA ASCENSORES, del 1 de Marzo de 2011, de MISTRAL TECNOLOGIES, S.L: 1. Dispositivo de acceso para ascensores, dichos ascensores del tipo de los que comprenden una puerta dispuesta frente a un desnivel (D), dicho […]
DISPOSITIVO DE ACCESO PARA ASCENSORES, del 1 de Marzo de 2011, de MISTRAL TECNOLOGIES, S.L: 1. Dispositivo de acceso para ascensores, dichos ascensores del tipo de los que comprenden una puerta dispuesta frente a un desnivel (D), dicho […]
DETECCIÓN DE FRENO DEL ASCENSOR Y OTRA RESISTENCIA MEDIANTE LA SUPERVISIÓN DE LA CORRIENTE DEL MOTOR, del 9 de Junio de 2011, de OTIS ELEVATOR COMPANY: Un método para verificar una resistencia excesiva en un sistema de ascensor que tiene un camarín desplazable en una caja de ascensor, caracterizado por: establecer, […]
 MONITORIZACIÓN DEL MANTENIMIENTO DE UN ASCENSOR SOBRE LA BASE DE UNAS CONDICIONES, del 16 de Mayo de 2011, de OTIS ELEVATOR COMPANY: Procedimiento para determinar cuándo se debe generar uno o más mensajes de recomendación de mantenimiento específicos, cada uno de ellos referido a un parámetro […]
MONITORIZACIÓN DEL MANTENIMIENTO DE UN ASCENSOR SOBRE LA BASE DE UNAS CONDICIONES, del 16 de Mayo de 2011, de OTIS ELEVATOR COMPANY: Procedimiento para determinar cuándo se debe generar uno o más mensajes de recomendación de mantenimiento específicos, cada uno de ellos referido a un parámetro […]
 DISPOSITIVO PARA EL FUNCIONAMIENTO ESPECIAL DE INSTALACIONES DE ASCENSOR, del 3 de Diciembre de 2009, de INVENTIO AG: Instalación de ascensor con un dispositivo para el funcionamiento especial, presentando el dispositivo como mínimo un elemento de mando (5a, 5b, 5c, 5d, 5e, 6a, […]
DISPOSITIVO PARA EL FUNCIONAMIENTO ESPECIAL DE INSTALACIONES DE ASCENSOR, del 3 de Diciembre de 2009, de INVENTIO AG: Instalación de ascensor con un dispositivo para el funcionamiento especial, presentando el dispositivo como mínimo un elemento de mando (5a, 5b, 5c, 5d, 5e, 6a, […]