PROCEDIMIENTO PARA DETERMINAR UNA SOLUCION DE NAVEGACION DE UN SISTEMA DE NAVEGACION CON UN MODULO DE NAVEGACION DE TERRENO, ASI COMO UN SISTEMA DE NAVEGACION.
- Procedimiento para determinar una solución de na- vegación de un sistema de navegación con un módulo de na- vegación de terreno,
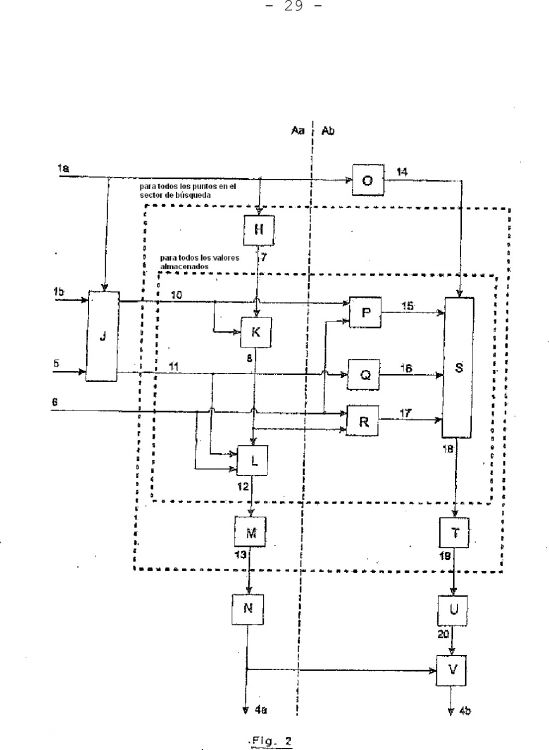
que comprende los pasos siguientes: - determinación de una solución de navegación (1), una solución de posición asistida (1a) y el camino relativo (1b) recorrido entre dos mediciones de altura con ayuda de sensores de navegación (A), (B), (Ga), (Gb), un módulo Strap Down (C) y un filtro de navegación (D), - obtención (M) de una calidad (14) de la respectiva posición asistida actual (1a) a partir de la res- pectiva posición asistida actual (1a) por medio de una primera función de calidad, - formación (H) de un sector de búsqueda sobre la base de criterios predeterminados y sobre la base de una respectiva solución de posición asistida predeterminada (1a) y formación de posiciones pre- determinadas (7) dentro del sector de búsqueda, - almacenamiento (J) de una medición de altura de terreno actual y del camino recorrido relativo en- tre la medición de altura de terreno actual y la medición de altura de terreno últimamente almace- nada (1b) para emplear éstas en la obtención de la calidad (15) de un respectivo camino relativamente recorrido y de la calidad (16) de una respectiva medición de altura de terreno almacenada, - determinación (K) de una posición de comparación (8) para una respectiva posición (7) dentro del sector de búsqueda y de un respectivo camino rela- tivamente recorrido almacenado (10), - obtención (P) de una calidad - transformada con ayuda del mapa de referencia (6) - de un respecti- vo camino relativamente recorrido almacenado (10) null - 21 - por medio de una segunda función de calidad emple- ando un respectivo camino relativamente recorrido almacenado (10), - obtención (Q) de una calidad (16) de una respecti- va medición de altura de terreno almacenada (11) por medio de una tercera función de calidad emple- ando la correspondiente medición de altura de te- rreno almacenada (11), - obtención (R) de una calidad (17) de una respecti- va altura de referencia (6) para una respectiva posición de comparación (8) a partir de parámetros predeterminados y de la altura de referencia co- rrespondiente (6) por medio de una cuarta función de calidad, - determinación (S) de posiciones de distribución (18) de las medidas de error para una respectiva posición de comparación (8) a partir de una fun- ción de la calidad de la respectiva posición asis- tida actual (14), la calidad - transformada con ayuda del mapa de referencia - de un respectivo camino relativamente recorrido (15), la calidad de una respectiva medición de altura de terreno alma- cenada (16) y la calidad de una respectiva altura de referencia (17), ES 2 348 044 T3 - obtención (T) de una función de distribución (19) del error total para una respectiva posición pre- determinada dentro del sector de búsqueda (7) en función de las funciones de distribución obtenidas (18) de las medidas de error, - obtención (U) de las probabilidades mínimas (20) de todas las posiciones empleadas (7) en el sector de búsqueda por medio de una función de las fun- ciones de distribución (19) de todos los errores totales como probabilidad con la que una respecti- null - 22 - va posición del sector de búsqueda presenta el error total mínimo, - determinación (V) de la calidad de la asistencia de posición (4b) con ayuda de una función de todas las probabilidades mínimas (20), - asistencia de la solución de navegación obtenida en el módulo Strap Down (C) a través del filtro de navegación (D) con ayuda de la asistencia de posi- ción determinada (4a) y de la calidad determinada de la asistencia de posición (4b)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06011459.
Solicitante: EADS DEUTSCHLAND GMBH.
Nacionalidad solicitante: Alemania.
Dirección: WILLY-MESSERSCHMITT-STRASSE 85521 OTTOBRUNN ALEMANIA.
Inventor/es: METZGER, JURGEN, KREUTZ,PETER, TADDIKEN,BERND.
Fecha de Publicación: .
Fecha Solicitud PCT: 2 de Junio de 2006.
Fecha Concesión Europea: 11 de Agosto de 2010.
Clasificación Internacional de Patentes:
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
Clasificación PCT:
- G01C21/00 G01C […] › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La invención concierne a un procedimiento para deter-minar una solución de navegación de un sistema de navega-ción con un módulo de navegación de terreno, así como a un sistema de navegación.
En D. H. Titterton y J. L. Weston: Strapdown inertial 10 navigation technology, Peter Peregrinus Ltd. 1997, se pre-senta cómo puede construirse con ayuda de un algoritmo Strap Down, que integra aceleraciones y velocidades de ro-tación, un sistema de navegación inercial. Este sistema de navegación inercial representa la base para un sistema de 15 navegación que determina posición, velocidad y situación de un vehículo. Dado que la integración de los datos de sensor inercial afectados de errores no permite una solu-ción de navegación estable a largo plazo, se fusionan otros sensores, como, por ejemplo, el sistema de posicio-20 namiento global (GPS), que permite una determinación de posición absoluto, con la solución del sistema de navega-ción inercial. En Mohinder S. Grewal y Lawrence R. Weill y Angus P. Andrews: Global Positioning Systems, Inertial Na-vigation, and Integration, John Wiley & Sons, Inc., 2001, 25 se describe cómo se fusiona mediante un filtro estocásti-co, especialmente un filtro de Kalman, la solución de la navegación inercial con otros datos de sensor, especial-mente GPS. Debido a la dependencia del GPS respecto de se-ñales de satélite externas es fácilmente posible que este 30 sistema pueda ser perturbado intencionadamente o sin in-tención. Por este motivo, se aprovechan otras señales de sensor para la fusión con la solución de navegación iner-cial. Una señal de sensor de esta clase es generada por un
módulo de navegación de terreno sobre la base de medicio-nes de distancia con respecto al suelo (radar, láser, so-nar...), en lo que sigue llamadas medición de altura. Esto se efectúa mediante la comparación de las mediciones de altura del terreno obtenidas a partir de las mediciones de 5 altura con un mapa de referencia que contiene las alturas reales del terreno. Existen varios enfoques acerca de cómo puede estar constituido un sistema de navegación de terre-no de esta clase. En F. Gustafsson, F. Gunnarsson, N. Bergman, U. Forssel, J. Jansson, R. Karlsson, P. Nordlund: 10 Particle Filters for Positioning, Navigation, and Trac-king, en: IEEE Transactions on Signal Processing, 50, 425-435, 2002, se describe un grupo basado en filtros estocás-ticos no lineales, especialmente filtros de partículas. Sin embargo, este grupo posee algunos inconvenientes con 15 respecto a su modularidad (posibilidad de desarrollo sepa-rado del sistema de navegación y el módulo de navegación de terreno) y a las prestaciones de adquisición (posibili-dad de corregir grandes errores de posición inicial). El segundo grupo se basa en procedimientos de comparación que 20 realizan una comparación directa de valores de medida de altura del terreno y el mapa de referencia, y se describe en J. P. Goldon: Terrain contour matching (TERCOM): a cruise missile guidance aid, en: Proceedings of the SPIE Image Processing for Missile Guidance, volumen 238, 1980. 25 Estos procedimientos de comparación son modulares y tienen unas excelentes prestaciones de adquisición y seguimiento. El inconveniente consiste en que este módulo de navegación de terreno no suministra ninguna información sobre la ca-lidad de la asistencia de posición propia. Por tanto, los 30 procedimientos actuales, como se describe en J. Metzger, O. Meister, G. F. Trommer, F. Tumbrägel, B. Taddiken: Coo-variance Estimation for Terrain Referenced Navigation with a Comparison Technique, en: Proceedings of the ION 60th
Annual Meeting, Junio 7-9, Dayton, Ohio, USA, 2004, emple-an procedimientos heurísticos para determinar la calidad necesaria para la fusión. En particular, en un procedi-miento heurístico de esta clase se evalúa la escabrosidad del terreno y se estima a partir de ella la calidad espe-5 rada de la asistencia de posición. Sin embargo, dado que, aparte de la escabrosidad, también otros factores, como la calidad de la IMU, la calidad del mapa de referencia y el propio algoritmo de comparación, tienen una influencia so-bre la calidad de las asistencias de posición, la calidad 10 determinada es tan sólo una solución subóptima. Un segundo procedimiento, como el que se describe en J. Metzger, G. F. Trommer: Improvement of Modular Terrain Navigatión Sys-tems by Measurement Decorrelation, en: Procedings of the ION 59th Annual Meeting, Junio 23-25, Albuquerque, Nuevo 15 México, USA, 2003, estima la varianza de las asistencias de posición a partir de varias asistencias de posición pa-sadas. Sin embargo, esto presupone un proceso de ruido ergódico estacionario para los errores de los valores fi-jos de posición, lo que no es aplicable en la mayoría de 20 los casos. Por tanto, también esta descripción de la cali-dad es tan sólo subóptima. En este punto se inicia el núcleo de la invención, que permite una indicación neta-mente más exacta de la calidad de las asistencias de posición. 25
El problema de la invención consiste en proporcionar un procedimiento y un sistema de navegación para determi-nar una solución de navegación de un sistema de navegación con un módulo de navegación de terreno, con los cuales se haga posible la determinación de la solución de navega-30 ción, especialmente la posición, velocidad y situación con calidad mejorada.
Este problema se resuelve con las características de las reivindicaciones independientes. Otras formas de rea-
lización están indicadas en las reivindicaciones subordi-nadas referidas a éstas.
Según la invención, se ha previsto un procedimiento para determinar una solución de navegación de un sistema de navegación con un módulo de navegación de terreno con 5 los pasos siguientes:
- determinación de una solución de navegación, una solución de posición asistida y el camino relativo recorrido entre dos mediciones de altura con ayuda de sensores de navegación, un módulo Strap Down y 10 un filtro de navegación,
- obtención de una calidad de la respectiva posición asistida actual a partir de la respectiva posición asistida actual por medio de una primera función de calidad, 15
- formación de un sector de búsqueda sobre la base de criterios predeterminados y sobre la base de una respectiva solución de posición asistida pre-determinada y formación de posiciones predetermi-nadas dentro del sector de búsqueda, 20
- almacenamiento de una medición actual de altura del terreno y del camino relativo recorrido entre la medición actual de altura del terreno y la me-dición de altura del terreno últimamente almacena-da para emplear éstas en la obtención de la cali-25 dad de un respectivo camino relativamente recorri-do y de la calidad de una respectiva medición al-macenada de altura del terreno,
- determinación de una posición de comparación para una respectiva posición dentro del sector de 30 búsqueda y un respectivo camino relativamente re-corrido almacenado,
- obtención de una calidad - transformada por medio del mapa de referencia - de un respectivo camino
relativamente recorrido almacenado por medio de una segunda función de calidad empleando un res-pectivo camino relativamente recorrido almacenado,
- obtención de la calidad de una respectiva medición almacenada de altura del terreno por medio de una 5 tercera función de calidad empleando la correspon-diente medición almacenada de altura del terreno,
- obtención de una calidad de una respectiva altura de referencia para una respectiva posición de com-paración a partir de parámetros predeterminados y 10 de la altura de referencia correspondiente por me-dio de una cuarta función de calidad,
- determinación de funciones de distribución de las medidas de error para una respectiva posición de comparación a partir de una función de la calidad 15 de la respectiva posición asistida actual, la ca-lidad - transformada por medio del mapa de refe-rencia - de un respectivo camino relativamente re-corrido, la calidad de una respectiva medición al-macenada de altura del terreno y la calidad de una 20 respectiva altura de referencia,
- obtención de una función de distribución del error total para una respectiva posición predeterminada dentro del sector de búsqueda en función de las funciones de distribución obtenidas de las medidas 25 de error,
- obtención de las probabilidades mínimas de todas...
Reivindicaciones:
1. Procedimiento para determinar una solución de na-vegación de un sistema de navegación con un módulo de na-vegación de terreno, que comprende los pasos siguientes:
- determinación de una solución de navegación (1), 5 una solución de posición asistida (1a) y el camino relativo (1b) recorrido entre dos mediciones de altura con ayuda de sensores de navegación (A), (B), (Ga), (Gb), un módulo Strap Down (C) y un filtro de navegación (D), 10
- obtención (M) de una calidad (14) de la respectiva posición asistida actual (1a) a partir de la res-pectiva posición asistida actual (1a) por medio de una primera función de calidad,
- formación (H) de un sector de búsqueda sobre la 15 base de criterios predeterminados y sobre la base de una respectiva solución de posición asistida predeterminada (1a) y formación de posiciones pre-determinadas (7) dentro del sector de búsqueda,
- almacenamiento (J) de una medición de altura de 20 terreno actual y del camino recorrido relativo en-tre la medición de altura de terreno actual y la medición de altura de terreno últimamente almace-nada (1b) para emplear éstas en la obtención de la calidad (15) de un respectivo camino relativamente 25 recorrido y de la calidad (16) de una respectiva medición de altura de terreno almacenada,
- determinación (K) de una posición de comparación (8) para una respectiva posición (7) dentro del sector de búsqueda y de un respectivo camino rela-30 tivamente recorrido almacenado (10),
- obtención (P) de una calidad - transformada con ayuda del mapa de referencia (6) - de un respecti-vo camino relativamente recorrido almacenado (10)
por medio de una segunda función de calidad emple-ando un respectivo camino relativamente recorrido almacenado (10),
- obtención (Q) de una calidad (16) de una respecti-va medición de altura de terreno almacenada (11) 5 por medio de una tercera función de calidad emple-ando la correspondiente medición de altura de te-rreno almacenada (11),
- obtención (R) de una calidad (17) de una respecti-va altura de referencia (6) para una respectiva 10 posición de comparación (8) a partir de parámetros predeterminados y de la altura de referencia co-rrespondiente (6) por medio de una cuarta función de calidad,
- determinación (S) de posiciones de distribución 15 (18) de las medidas de error para una respectiva posición de comparación (8) a partir de una fun-ción de la calidad de la respectiva posición asis-tida actual (14), la calidad - transformada con ayuda del mapa de referencia - de un respectivo 20 camino relativamente recorrido (15), la calidad de una respectiva medición de altura de terreno alma-cenada (16) y la calidad de una respectiva altura de referencia (17),
- obtención (T) de una función de distribución (19) 25 del error total para una respectiva posición pre-determinada dentro del sector de búsqueda (7) en función de las funciones de distribución obtenidas (18) de las medidas de error,
- obtención (U) de las probabilidades mínimas (20) 30 de todas las posiciones empleadas (7) en el sector de búsqueda por medio de una función de las fun-ciones de distribución (19) de todos los errores totales como probabilidad con la que una respecti-
va posición del sector de búsqueda presenta el error total mínimo,
- determinación (V) de la calidad de la asistencia de posición (4b) con ayuda de una función de todas las probabilidades mínimas (20), 5
- asistencia de la solución de navegación obtenida en el módulo Strap Down (C) a través del filtro de navegación (D) con ayuda de la asistencia de posición determinada (4a) y de la calidad determinada de la asistencia de posición (4b). 10
2. Procedimiento según la reivindicación 1, caracte-rizado porque la obtención (M) de la calidad (14) de la respectiva posición asistida actual (1a) se efectúa a par-tir de las respectiva posición asistida actual (1a) por medio de una primera función de calidad con ayuda de una 15 primera función de distribución.
3. Procedimiento según la reivindicación 2, caracte-rizado porque la primera función de calidad emplea una función de distribución gaussiana con una primera varian-za. 20
4. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque en la formación (H) del sector de búsqueda se emplea un sector de búsqueda centrado en torno a una solución de posición asistida (1a). 25
5. Procedimiento según cualquiera de las reivindicaciones 1 a 3 anteriores, caracterizado porque en la forma-ción (H) del sector de búsqueda se emplean unas magnitudes de sector de búsqueda que varían sobre la base de la inex-actitud de una respectiva solución de posición asistida 30 (1a).
6. Procedimiento según cualquiera de las reivindicaciones 1 a 3 anteriores, caracterizado porque en la forma-ción (H) del sector de búsqueda se emplean posiciones (7)
que están dispuestas equidistantemente sobre una trama predefinida.
7. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque en el almacena-miento (J) se obtiene la medición de altura de terreno ac-5 tual a partir de la medición de altura actual (5) y de la posición asistida actual (1a).
8. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque en el almacena-miento (J) de una medición de altura de terreno actual y 10 del camino recorrido relativo se almacena un número prefi-jado de mediciones de altura de terreno y de caminos reco-rridos relativos (1b).
9. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque en la obtención 15 (P) de la calidad - transformada con ayuda del mapa de re-ferencia (6) - del camino relativamente recorrido almace-nado (10) se emplea una segunda función de distribución.
10. Procedimiento según la reivindicación 9, carac-terizado porque en la obtención (P) de la calidad trans-20 formada con ayuda del mapa de referencia (6) se emplea una función de distribución gaussiana con una segunda varian-za.
11. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque en la obtención 25 (Q) de la calidad (16) de una respectiva medición de altu-ra de terreno almacenada (11) se emplea una tercera fun-ción de distribución,
12. Procedimiento según la reivindicación 11, carac-terizado porque en la obtención (Q) de la calidad se em-30 plea una función de distribución gaussiana con una tercera varianza.
13. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque en la obtención
(R) de la calidad (16) de una altura de referencia se em-plea una cuarta función de distribución.
14. Procedimiento según la reivindicación 13, carac-terizado porque en la obtención (R) de la calidad se em-plea una función de distribución gaussiana con una cuarta 5 varianza.
15. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque la obtención (T) de las funciones de distribución (19) del error total para una respectiva posición predeterminada dentro del sector 10 de búsqueda (7) se realiza por medio del plegado de las distintas funciones de distribución de las medidas de error (15).
16. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque la determinación 15 (V) de la calidad de la asistencia de posición (4b) se efectúa con ayuda de una función de toda las probabilida-des mínimas (20) por medio de una función de distribución discreta que está definida por las probabilidades mínimas (20). 20
17. Procedimiento según cualquiera de las reivindicaciones 1 a 14 anteriores, caracterizado porque la deter-minación (V) de la calidad de la asistencia de posición (4b) se efectúa con ayuda de una matriz de covarianzas que se calcula a partir de las probabilidades mínimas (20) y 25 de la asistencia de posición real (4a).
18. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque en la asistencia de la solución de navegación obtenida en el módulo Strap Down (C) se emplean: 30
- la determinación de la asistencia de posición (4a) con ayuda del cálculo (L) de la medida de error (12) para la respectiva posición de comparación (8),
- la determinación (M) del error total (13) para la respectiva posición en el sector de búsqueda (7) y
- la búsqueda del error total mínimo (N) con ayuda de todos los errores totales en el sector de búsqueda para la identificación de la asistencia 5 de posición (4a).
19. Sistema de navegación con un módulo Strap Down y un filtro de navegación y con un módulo de navegación de terreno para determinar una solución de navegación, en donde se alimentan al módulo de navegación de terreno (A) 10 una solución de posición asistida (1a) y unos caminos re-lativos (1b) recorridos entre dos mediciones de altura, caracterizado porque el módulo de navegación de terreno (A) comprende las funciones siguientes:
- una función para la obtención (M) de una calidad 15 (14) de la respectiva posición asistida actual (1a) a partir de la respectiva posición asistida actual (1a) por medio de una primera función de calidad,
- una función para la formación (H) de un sector de 20 búsqueda y para la formación de posiciones prede-terminadas (7) dentro del sector de búsqueda,
- una función para el almacenamiento (J) de una me-dición actual de altura del terreno y del camino recorrido relativo entre la medición actual de al-25 tura del terreno y la medición de altura del te-rreno últimamente almacenada (1b) a fin de emplear éstas para obtener la calidad (15) de un respecti-vo camino relativamente recorrido y la calidad (16) de una respectiva medición de altura del te-30 rreno,
- una función para la determinación (K) de una posición de comparación (8) para una respectiva posición (7) dentro del sector de búsqueda y de un
respectivo camino relativamente recorrido almace-nado (10),
- una función para la obtención (P) de una calidad - transformada por medio del mapa de referencia (6) - de un respectivo camino relativamente recorrido 5 almacenado (10) por medio de una segunda función de calidad empleando un respectivo camino relati-vamente recorrido almacenado (10),
- una función para la obtención (Q) de una calidad (16) de una respectiva medición de altura de te-10 rreno almacenada (11) por medio de una tercera función de calidad empleando la correspondiente medición de altura de terreno almacenada (11),
- una función para la obtención (R) de una calidad (17) de una respectiva altura de referencia (6) 15 para una respectiva posición de comparación (8) a partir de parámetros predeterminados y de la co-rrespondiente altura de referencia (6) por medio de una cuarta función de calidad,
- una función para la determinación (S) de funciones 20 de distribución (18) de las medidas de error para una respectiva posición de comparación (8) a par-tir de una función de la calidad de la respectiva posición asistida actual (14), la calidad - trans-formada a través del mapa de referencia - de un 25 respectivo camino relativamente recorrido (15), la calidad de una respectiva medición de altura de terreno almacenada (16) y la calidad de una res-pectiva altura de referencia (17),
- una función para la obtención (T) de una función 30 de distribución (19) del error total para una res-pectiva posición predeterminada dentro del sector de búsqueda (7) en función de las funciones de distribución obtenidas (18) de las medidas de
error,
- una función para la obtención (U) de las probabi-lidades mínimas (20) de todas las posiciones em-pleadas (7) en el sector de búsqueda por medio de una función de las funciones de distribución (19) 5 de todos los errores totales como probabilidad con la que una respectiva posición del sector de búsqueda presenta el error total mínimo,
- una función para la determinación (V) de la cali-dad de la asistencia de posición (4b) a través de 10 una función de todas las probabilidades mínimas (20),
- una función para la asistencia de la solución de navegación obtenida en el módulo Strap Down (C) a través del filtro de navegación (D) con ayuda de 15 la asistencia de posición determinada (4a) y de la calidad determinada de la asistencia de posición (4b).
Patentes similares o relacionadas:
Captación de corredor, del 29 de Abril de 2020, de nearmap australia pty, ltd: Un método para crear un ortomosaico de un área de corredor que consiste en una faja de tierra o de agua a lo largo de una trayectoria arbitraria , área […]
 Procedimiento para mejorar la precisión de un sistema de navegación en base a radio, del 25 de Marzo de 2020, de SAAB AB: Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema […]
Procedimiento para mejorar la precisión de un sistema de navegación en base a radio, del 25 de Marzo de 2020, de SAAB AB: Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema […]
Sistema y método para medir un desplazamiento de una plataforma móvil, del 18 de Marzo de 2020, de SZ DJI Technology Co., Ltd: Un metodo para detectar un desplazamiento de una plataforma movil, que comprende: obtener un primer marco (811a) y un segundo marco (811b) con un dispositivo […]
Un método y sistema implementados por ordenador para generar una trayectoria 3D a una ubicación de aterrizaje para un vehículo aéreo, del 1 de Enero de 2020, de THE BOEING COMPANY: Un sistema para generar una trayectoria 3D a partir de un origen a un destino para un vehículo aéreo (AV), el sistema comprende: - una unidad de gestión […]
Navegación vehicular basada en datos de calidad de sensor específicos del sitio, del 23 de Octubre de 2019, de DEERE & COMPANY: Un método para determinar la localización de un vehículo, el método que comprende: determinar los datos de localización de recepción dentro de una celda de un área […]
Navegación basada en al menos un sensor y un mapa 3D, del 16 de Octubre de 2019, de Vricon Systems Aktiebolag: Un procedimiento de navegación de un vehículo aéreo, comprendiendo el procedimiento la provisión de una imagen de sensor a partir de un […]
Procedimiento de provisión de información de ruta y dispositivo electrónico para procesar el mismo, del 17 de Julio de 2019, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de operación de un dispositivo electrónico, que comprende: determinar por al menos un sensor una ubicación presente como una […]
Múltiples grupos de control de enlace de radio (RLC), del 15 de Mayo de 2019, de Intel IP Corporation: Un equipo de usuario, UE, capaz de agregación de portadoras, CA, configurado para procesar el flujo de control de enlace de radio, RLC, dicho UE […]