Procedimiento y dispositivo para la localización de objetos.
Procedimiento para la localización de un objeto (10, 20, 22) que se mueve en un entorno desconocido,
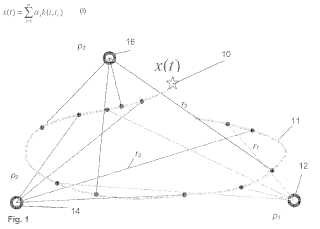
conprevisión de k marcas de posición (12, 14, 16; 22, 24, 25, 26, 27) en posiciones indeterminadas distanciadas unasde otras p1, p2,..., pk, con , siendo k un número natural mayor o igual que 3,
medición repetida de la distancia entre objeto (10, 20, 22) y marca de posición (12, 14, 16; 22, 24, 25, 26, 27) paracada una de las marcas de posición (12, 14, 16; 22, 24, 25, 26, 27) independientemente unas de otras parainstantes incontrolados, de manera que para los instantes existen los valores de distancia, y
cálculo de una curva de movimiento**Fórmula** mediante
siendo n el número de mediciones de distancia empleadas y siendo cada función k(t, ti) una función principaldefinida positivamente y siendo vectores de coeficiente, que son valorados por condiciones deplanitud por medio de un término de regularización formado con las funciones principales, efectuándose lavaloración de las posiciones de las marcas de posición (12, 14, 16; 22, 24, 25, 26, 27) y delos vectores de coeficiente por minimización de un funcional de riesgo regularizado, que con elempleo de coordenadas cartesianas es representable en la forma
con
representando K la matriz de Gram**Fórmula**
y las coordenadas x, y, y z de los vectores de coeficiente cony con**Fórmula**
pk un vector, que contiene las posiciones.**Fórmula**
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/051408.
Solicitante: EADS DEUTSCHLAND GMBH.
Nacionalidad solicitante: Alemania.
Dirección: WILLY-MESSERSCHMITT-STRASSE 85521 OTTOBRUNN ALEMANIA.
Inventor/es: KOTZOR,DANIEL, UTSCHICK,WOLFGANG.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S5/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
- G05D1/00 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
- G06K9/00 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
PDF original: ES-2449466_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo para la localización de objetos El invento se refiere a un procedimiento y a un dispositivo para la localización de objetos en un terreno desconocido. Además el invento se refiere a varios empleos de un procedimiento semejante así como de un dispositivo semejante.
"Simultaneous Localization And Mapping" (en lo que sigue abreviado SLAM) designa uno de los problemas fundamentales en la navegación autónoma. La tarea consiste en localizarse en un entorno desconocido y simultáneamente construir un mapa de este entorno. Tan solo por los procesos de los últimos años es en general posible navegar autónomamente en tiempo real en terreno desconocido.
Se han dado a conocer a la opinión pública las tecnologías correspondientes, en particular por los "Grand Challenges" de la Defense Advanced Research Projects Agency (DARPA) de los Estados Unidos de América. La DARPA ha organizado en los años 2004, 2005 y 2007 carreras de vehículos no tripulados, que debían poder orientarse por sí mismos. Los correspondientes eventos, en los cuales han tomado parte renombrados institutos y científicos, fueron dados a conocer por los medios como radio, televisión e Internet. Un particular desafío representan en ello la localización autónoma de los correspondientes vehículos y la construcción de un mapa del entorno.
Para la comprensión del invento se hace en particular remisión a las siguientes citas de la literatura del estado de la técnica:
[1] B. Schölkopf and A. Smola Learning with Kernels MIT Press, Cambridge, Massachusetts, London 2002
[2] C. Taylor, A. Rahimi, J. Bachrach, H. Shrobe and A. Grue Simultaneous Localization, Calibration, and Tracking in an ad Hoc Sensor Network, Computer Science and Artificial Intelligence Laborator y Massachusetts Institute of 20 Technology, Cambridge, MA 02139
[3] E. Olson, J. Leonard and S. Teller Robust Range-Only Beacon Localization, Proceedings of Autonomous Underwater Vehicles, 2004
[4] P. Newman, and J. Leonard Pure Range-Only Sub-Sea SLAM, Massachusetts Institute of Technology
[5] G. Hollinger, J. Djugash and S. Singh Tracking a moving target in cluttered environments with ranging radios, 2008 25 IEEE International Conference on Robotics and Automation [6] J. L Blanco, J. González and J. A Fernández-Madrigal A pure probabilistic approach to range-only SLAM, 2008 IEEE International Conference on Robotics and Automation [7] X. Nguyen, M. I. Jordan and B. Sinopoli A Kernel-based learning approach to ad hoc sensor network localisation, University of California, Berkeley
[8] Dan Li et al. Detection, classification, and tracking of targets, IEEE Signal Processing Magazine, März 2002
En los procedimientos de localización conocidos hasta ahora es problemático que las posiciones de jalones o marcas de posición, con relación a las cuales se efectúa una localización, deben ser conocidas o por lo menos debe ser conocida su posición una con respecto a otra. Por ejemplo en los procedimientos SLAM empleados hasta ahora se medirían la distancia y la dirección a puntos destacados en el entorno desconocido (por ejemplo una torre de iglesia, un mástil de bandera, un pico o un árbol) . A partir de la información de la distancia y de la dirección se puede determinar con relativa facilidad la propia posición. Esto necesita sin embargo técnicas de medición relativamente complicadas. Por ejemplo debe trabajarse a la vista. En la oscuridad o en edificios una localización semejante es apenas posible.
Para la realización de la mayor parte de los procedimientos de localización conocidos es necesaria una complicada medición o predeterminación exacta de marcas de posición, lo que en muchos casos no es posible realizar o sólo lo es con técnica de medición relativamente complicada.
Existe por eso el deseo de poner a disposición un procedimiento para la localización de objetos, con el cual un objeto que se mueve pueda ser localizado por sí mismo sólo a base de mediciones de distancia a posiciones a fijar, pero en sí desconocidas.
En caso de que no exista ninguna información de distancias entre las marcas de posición, es decir, no tenga lugar
ninguna comunicación entre las marcas de posición, hay sólo muy pocos procedimientos que solucionen el problema de la localización puramente basada en la distancia.
Son de citar aquí los trabajos de investigación de:
C. Taylor, A. Rahimi, J. Bachrach, H. Shrobe and A. Grue [2] :
En su trabajo presentan un procedimiento para la localización a base de medidas de distancia. Sin embargo hay en este procedimiento conocido importantes inconvenientes:
1) Requiere mediciones de distancia sincronizadas/simultáneas de al menos cuatro marcas de posición simultáneamente 5 por paso de valoración. El algoritmo propuesto puede ser empleado sólo para determinadas constelaciones; es necesaria una complicada sincronización de las mediciones de distancia y una complicada técnica de medición.
2) El resultado es devuelto en forma de posiciones discretas. Sensores adicionales, que suministren datos adicionales respecto a instantes no sincrónicos, no pueden ser incluidos sin reticulación en el procedimiento conocido.
J. Leonard, S. Teller, E. Olson and P. Newman [3], [4]
Los autores describen en su trabajo un procedimiento para la localización de un submarino con datos de distancia a boyas como marcas de posición. También este procedimiento presenta los inconvenientes arriba y 1) y 2) citados. Sin embargo en su trabajo se menciona el problema de sincronización y como solución se reclama un modelo de movimiento discreto sencillo, que implícitamente supone que los datos del sensor se presentan con intervalo de tiempo constante. Tampoco este método es apropiado para el problema de localización determinado que aquí interesa.
G. Hollinger, J. Djugash and S. Singh [5] En esta publicación los autores describen un procedimiento para la localización de un objeto que se mueve con ayuda de emisores de radio, cuya posición puede ser conocida o no. Si las posiciones de los emisores de radio son desconocidas, el procedimiento se desarrolla en dos pasos. En un primer paso se calcula la curva de movimiento del objeto que se mueve. A continuación se emplea la curva de movimiento para calcular la posición de los emisores de radio fijos.
El problema del invento es poner a disposición un procedimiento y un dispositivo por medio de los cuales con pequeñas exigencias en la técnica de medición pueda ser localizado un objeto que se mueve en un entorno desconocido.
Este problema es solucionado por un procedimiento con los pasos de la reivindicación principal, así como por un dispositivo con las características de la reivindicación secundaria.
Configuraciones ventajosas del invento son objeto de las reivindicaciones subordinadas.
El invento proporciona un procedimiento para la localización de un objeto que se mueve en un entorno desconocido, con:
medición repetida de la distancia entre objeto y marca de posición para cada una de las marcas de posición independientemente unas de otras para instantes incontrolados, de manera que para los instantes
existen los valores de distancia ,
y cálculo de una curva de movimiento mediante
siendo n el número de mediciones de distancia empleadas y cada función
una función principal definida positivamente y siendo vectores de coeficiente, que son valorados por condiciones de planitud 35 por medio de un término de regularización formado con las funciones principales.
Además se propone según el invento un dispositivo para la realización del procedimiento y/o para la localización de un objeto que se mueve en un entorno desconocido, con: Una instalación de medición, que está configurada para la medición repetida de la distancia entre el objeto y al menos tres marcas de posición dispuestas fijas en posiciones indeterminadas para cada una de las marcas de posición independientemente unas de otras en una serie de instantes y es apta para la emisión de valores de distancia calculados para los instantes y
una instalación de evaluación para calcular una curva de movimiento mediante siendo n el número de mediciones de distancia empleadas y cada función
una función principal definida positivamente y siendo vectores de coeficiente, y estando la instalación de evaluación adaptada para valorar los vectores de coeficiente por condiciones de planitud por medio de un término de regularización formado 5 con las funciones principales.
El presente invento ofrece el desarrollo actual en el campo de la navegación autónoma (SLAM) así como los conocimientos... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la localización de un objeto (10, 20, 22) que se mueve en un entorno desconocido, con previsión de k marcas de posición (12, 14, 16; 22, 24, 25, 26, 27) en posiciones indeterminadas distanciadas unas
de otras p1, p2, ..., pk, con , siendo k un número natural mayor o igual que 3, medición repetida de la distancia entre objeto (10, 20, 22) y marca de posición (12, 14, 16; 22, 24, 25, 26, 27) para cada una de las marcas de posición (12, 14, 16; 22, 24, 25, 26, 27) independientemente unas de otras para
instantes incontrolados, de manera que para los instantes existen los valores de distancia , y cálculo de una curva de movimiento mediante siendo n el número de mediciones de distancia empleadas y siendo cada función k (t, ti) una función principal
definida positivamente y siendo vectores de coeficiente, que son valorados por condiciones de planitud por medio de un término de regularización formado con las funciones principales, efectuándose la
valoración de las posiciones de las marcas de posición (12, 14, 16; 22, 24, 25, 26, 27) y de los vectores de coeficiente por minimización de un funcional de riesgo regularizado, que con el empleo de coordenadas cartesianas es representable en la forma
con representando K la matriz de Gram
y
las coordenadas x, y, y z de los vectores de coeficiente con
y
con pk un vector, que contiene las posiciones de las marcas de posición (12, 14, 16; 22, 24, 25, 26, 27) y en particular es representable en una forma ; y μ un parámetro escalar a adaptar al respectivo objeto (10, 20, 22) , en particular por cálculo empírico, para la ponderación entre el termino de regularización y la función de costes 2. Procedimiento según la reivindicación 1, caracterizado por
3. Procedimiento según la reivindicación 2, caracterizado porque la desviación estándar ! se elige en correspondencia a la dinámica del objeto (10, 20, 22) de manera que en el caso de un objeto (22) con movimiento que varía en cantidad y/o dirección más rápidamente una desviación estándar menor que en el caso de un objeto (20) con movimiento que varía en cantidad y/o dirección más 15 lentamente.
4. Procedimiento según la reivindicación 1, caracterizado por determinación de una función de respuesta de impulso que indica una respuesta de impulso del sistema dinámico formado por el movimiento del objetos (10, 20, 22) y
empleo de la función de respuesta de impulso como función principal k (t, t’) para el cálculo de la curva de movimiento.
5. Procedimiento según una de las reivindicaciones precedentes, caracterizado por formación del término de regularización a partir de un producto vectorial de los vectores de coeficiente con la matriz de Gram de las funciones principales.
6. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque la previsión de marcas de posición (12, 14, 16; 22, 24, 25, 26, 27) comprende el empleo de emisores o emisoresreceptores estacionarios como marcas de posición y porque la medición comprende el cálculo de la distancia del respectivo emisor o emisor-receptor a un receptor o emisor-receptor que se mueve junto con el objeto (10) .
7. Dispositivo para la realización del procedimiento según una de las reivindicaciones precedentes y/o para la localización de un objeto (10, 20, 22) que se mueve en un entorno desconocido con: una instalación de medición, que está configurada para la medición repetida de la distancia entre el objeto (10, 20, 22) y al menos tres marcas de posición (12, 14, 16; 22, 24, 25, 26, 27) dispuestas fijas en posiciones indeterminadas para cada una de las marcas de posición independientemente unas de otras para una serie de
instantes y es apta para la emisión de valores de distancia calculados para los instantes y
una instalación de evaluación para calcular una curva de movimiento mediante evaluación adaptada para valorar los vectores de coeficiente por condiciones de planitud por medio de un término de regularización formado con las funciones principales, efectuándose la valoración de las posiciones de las marcas de posición (12, 14, 16; 22, 24, 25, 26, 27) y de los vectores de coeficiente por minimización de un funcional de riesgo regularizado, que con empleo de coordenadas cartesianas es representable en la forma
con representando K la matriz de Gram
26, 27) y en particular es representable en una forma ; y μ un parámetro escalar a adaptar al respectivo objeto (10, 20, 22) , en particular por cálculo empírico, para la ponderación entre el termino de regularización y la función de costes 8. Procedimiento según la reivindicación 7, caracterizado porque la instalación de medición presenta al menos tres instalaciones de marcado de marcas de posición, en particular emisores o emisores receptores o reflectores o repetidores, para formar o marcar las al menos tres marcas de posición (12, 14, 16; 22, 24, 25, 26, 27) y al menos una instalación de marcado de objetos, en particular receptor o emisor-receptor, estando la instalación de medición adaptada para la determinación individual de las distancias entre las instalaciones de marcado de marcas de posición y la instalación de marcado de objetos bajo identificación de la instalación de marcado de marcas de posición medida en cada caso.
9. Empleo del procedimiento según una de las reivindicaciones 1 a 6 y/o del dispositivo según una de las reivindicaciones 7 u 8 para la localización y configuración de mapas en base a datos de distancia.
10. Empleo del procedimiento según una de las reivindicaciones 1 a 6 y/o del dispositivo según una de las reivindicaciones 7 u 8 para la orientación en un terreno o edificio desconocido.
11. Empleo según la reivindicación 10, caracterizado porque las marcas de posición son colocadas o lanzadas en lugares diferentes cerca del terreno o el edificio.
Patentes similares o relacionadas:
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Aprovechamiento de un apretón de manos físico en pantallas montadas en la cabeza, del 24 de Junio de 2020, de QUALCOMM INCORPORATED: Un procedimiento de gestión de información para un dispositivo de interfaz , comprendiendo dicho procedimiento : detectar […]