DISPOSITIVO DE CONTROL DE POSICION(ES) RELATIVA(S) MEDIANTE ANALISIS DE SEÑALES BIFRECUENCIA, PARA UNA NAVE ESPACIAL DE UN GRUPO DE NAVES ESPACIALES EN FORMACION.
Dispositivo de control (D), para una nave espacial (Si) de un grupo de naves espaciales destinado a desplazarse según una formación elegida,
que comprende:
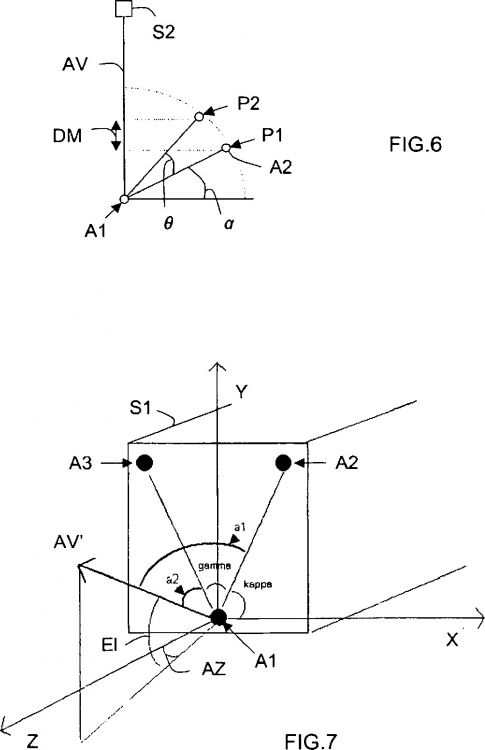
- al menos un conjunto constituido por una antena de emisión/recepción (A1) y por dos antenas receptoras (A2, A3) implantadas en emplazamientos elegidos en una cara de dicha nave espacial (Si) y apropiadas para emitir y/o recibir señales de radiofrecuencias, estando dispuesta cada antena (A1-A3) de dicho conjunto para emitir y/o recibir señales primeras y segundas que presentan frecuencias primera y segunda elegidas separadas una desviación de frecuencia elegida,
- medios de tratamiento (MT) dispuestos para estimar las direcciones de transmisión de las señales emitidas por las otras naves espaciales del grupo a partir de dichas señales recibidas por dichas antenas (A1-A3), cada antena (A1-A3) de dicho conjunto
- primeros medios de medición (M1) dispuestos para determinar diferencias de marcha primeras y segundas entre las antenas (A1-A3) correspondientes a la frecuencia primera o segunda y a dicha desviación de frecuencia, a partir de las señales primeras y segundas recibidas por cada una de dichas antenas de dicho conjunto procedentes de otra nave espacial (Si'') de dicho grupo,
- medios de medición de la actitud (M2) dispuestos para suministrar mediciones de la rotación experimentada por dicha nave espacial (Si),
- dichos medios de tratamiento (MT) están dispuestos para a) estimar de manera basta la dirección de transmisión de las señales emitidas por dicha otra nave espacial (Si'') a partir de diferencias de marcha primera y segunda denominadas iniciales, b) ordenar un posicionamiento basto de dicha nave espacial (Si), caracterizado porque el posicionamiento basto de dicha nave espacial se realiza de manera que un eje elegido (X) de un sistema de referencia ligado a dicha nave espacial esté sensiblemente alineado con respecto a dicha dirección de transmisión estimada de manera basta, y porque dichos medios de tratamiento (MT) están dispuestos para c) ordenar al menos una puesta en rotación elegida de dicha nave espacial (Si) alrededor de dicho eje elegido (X), d) estimar con precisión dicha dirección de transmisión de las señales emitidas por dicha otra nave espacial (Si'') a partir de la medición de la rotación suministrada por dichos medios de medición de la actitud (M2) y de una medición de la variación de la diferencia de marcha primera o segunda inducida por dicha rotación, realizada por dichos primeros medios de medición (M1)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06300040.
Solicitante: ALCATEL LUCENT.
Nacionalidad solicitante: Francia.
Dirección: 54 RUE LA BOETIE,75008 PARIS.
Inventor/es: MEHLEN,CHRISTIAN ALCATEL ALENIA SPACE CANNES, PIERRE,ESTELLE ALCATEL ALENIA SPACE CANNES.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Enero de 2006.
Fecha Concesión Europea: 10 de Marzo de 2010.
Clasificación Internacional de Patentes:
- B64G1/10M
- B64G1/24A
- B64G1/36 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64G ASTRONAUTICA; VEHICULOS O EQUIPOS A ESTE EFECTO (aparatos o métodos para obtener materiales de fuentes extraterrestres E21C 51/00). › B64G 1/00 Vehículos espaciales. › que utilizan sensores, p. ej. sensores solares, sensores de horizonte.
- G01S5/00R3
- G01S5/02B
- G01S5/02R
- G05D1/10 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
Clasificación PCT:
- G01S5/02 G […] › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
- G01S5/14 G01S 5/00 […] › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Dispositivo de control de posición(es) relativa(s) mediante análisis de señales bifrecuencia, para una nave espacial de un grupo de naves espaciales en formación.
La invención se refiere a los grupos de naves espaciales, tales como por ejemplo satélites, destinados a desplazarse en formación para garantizar colectivamente una misión y, más precisamente, al control de las posiciones relativas de esas naves espaciales unas con respecto a otras.
Tal como conoce el experto en la técnica, ciertos grupos de naves espaciales deben posicionarse unas con respecto a otras con una cierta precisión con el fin de garantizar colectivamente una misión. Este posicionamiento interviene especialmente durante varias fases de la misión: despliegue tras el lanzamiento, crucero y mantenimiento fino de la formación para realizar su objetivo de misión. El posicionamiento también puede intervenir para realizar una reconfiguración parcial o total del grupo, o para paliar un fallo técnico (o una avería de equipo) de al menos una de las naves espaciales.
El posicionamiento mediante una técnica de tipo GPS relativo no siempre está adaptado a este tipo de misión o bien porque la altitud de la misión es demasiado elevada con respecto a la altitud de la constelación GPS ("Global Positioning System" - posicionamiento por satélites), o bien porque se requiere un medio de posicionamiento complementario o independiente.
Con el fin de permitir un posicionamiento de este tipo, se ha propuesto equipar las naves espaciales con un dispositivo de control que comprende al menos, por una primera parte, antenas de emisión/recepción, eventualmente completadas mediante antenas de recepción, implantadas en caras de orientaciones diferentes de la nave espacial, y encargadas de emitir/recibir señales de radiofrecuencias (RF), por una segunda parte, un "sensor de RF" que comprende concretamente primeros medios de medición encargados de estimar diferencias de marcha de señales recibidas entre antenas y, por una tercera parte, medios de tratamiento encargados de estimar las direcciones de transmisión de las señales que se emiten por las otras naves espaciales del grupo (denominadas generalmente "ejes de visión"), a partir de las diferencias de marcha, como se describe concretamente en el documento US-A-6 072 433.
Un dispositivo de control de este tipo también puede comprender segundos medios de medición encargados de estimar cada distancia que separa su nave espacial de una de las otras naves espaciales del grupo, a partir de las señales recibidas por las antenas y de señales auxiliares transmitidas por las otras naves espaciales del grupo. En este caso, los medios de tratamiento pueden determinar las posiciones relativas de las naves espaciales del grupo con respecto a un sistema de referencia elegido, a partir de las distancias estimadas y de los ejes de visión estimados.
Una determinación de este tipo de las posiciones relativas permite entonces controlar las naves espaciales del grupo con el fin de llevarlas y de mantenerlas en la configuración geométrica requerida por la misión y de decidir cualquier maniobra de evitación en caso de detección de un riesgo de colisión entre naves espaciales.
La obtención de una precisión centimétrica o subcentimétrica de las posiciones relativas requiere trabajar con mediciones de fase de portadora. Habitualmente el experto en la técnica sabe medir la fase con una precisión igual a una fracción de la longitud de onda (normalmente el 5% de la longitud de onda en un entorno con múltiples trayectorias razonables). No obstante, dado que las mediciones de fase se conocen con una aproximación de 2p, son ambiguas, y una dificultad consiste en eliminar esa ambigüedad.
El uso de señales de frecuencia muy elevada (en SHF o EHF) permite disponer de una banda de frecuencia ancha, lo que puede facilitar eliminar la ambigüedad mediante técnicas de barrido de la portadora o técnicas de múltiples portadoras. Al ser el debilitamiento de una señal en el espacio libre proporcional al cuadrado de su frecuencia, cuando se usan señales de frecuencia muy elevada, es necesaria o bien una potencia emitida elevada, o bien una antena directiva, lo que limita el campo de uso de esas frecuencias muy elevadas. En efecto, no es posible determinar las posiciones relativas precisas de las naves espaciales del grupo cuando sus posiciones iniciales corresponden a ejes de visión muy inclinados.
El uso de frecuencias más bajas, tales como las asignadas en la banda S a las conexiones espaciales bordo/tierra y bordo/bordo (de 2,0 GHz a 2,2 GHz), permite usar antenas omnidireccionales y una potencia de emisión baja (por debajo del vatio para distancias entre naves espaciales de varias decenas de kilómetros). Es posible usar dos frecuencias que distan aproximadamente 100 MHz en el interior de esta banda para facilitar eliminar la ambigüedad: se combinan entonces las mediciones de fase procedentes de estas dos frecuencias para obtener una medición de fase en una portadora virtual cuya longitud de onda es más larga. Una combinación posible consiste en restar las mediciones de fase de las dos frecuencias, con el fin de obtener una medición de fase asociada con la frecuencia de batido de las dos frecuencias.
Se pasa así de una longitud de onda real de aproximadamente 15 cm a una longitud de onda virtual de aproximadamente 3 m. Si la distancia que separa las antenas es por ejemplo de 1 m, la diferencia de marcha está necesariamente comprendida entre -1 m y +1 m. El uso de una longitud de onda de aproximadamente 3 m proporciona entonces una medición no ambigua de esta diferencia de marcha. Sin embargo, esta medición presenta un error importante: si el error de medición en la fase de las dos frecuencias es de aproximadamente el 5% de la longitud de onda (el 5% de 15 cm es 7,5 mm), el error en la medición de fase combinada puede alcanzar el 10% de la longitud de onda "larga" (el 10% de 3 m es 30 cm).
Las principales fuentes de error son las múltiples trayectorias y los residuos de calibración de propagación en la electrónica de recepción. Estos errores evolucionan muy lentamente y son difíciles de filtrar, concretamente si el número de naves espaciales se reduce a dos, ya que entonces no hay ninguna redundancia de observación.
La invención tiene por tanto como objetivo mejorar la situación, concretamente a partir de las siguientes observaciones:
La invención propone un dispositivo de control para una nave espacial de un grupo de naves espaciales destinado a desplazarse según una formación elegida, y tal como se define en la reivindicación 1.
El dispositivo según la invención puede comprender otras características que pueden tomarse por separado o en combinación, y concretamente:
Reivindicaciones:
1. Dispositivo de control (D), para una nave espacial (Si) de un grupo de naves espaciales destinado a desplazarse según una formación elegida, que comprende:
2. Dispositivo según la reivindicación 1, caracterizado porque dichos medios de tratamiento (MT) están dispuestos, antes de ordenar dicha puesta en rotación, para generar instrucciones destinadas a ordenar una estabilización del posicionamiento basto a velocidad casi nula de dicha nave espacial (Si), a partir de dicha medición de la variación de una de las diferencias de marcha primera y segunda realizada por dichos primeros medios de medición (M1).
3. Dispositivo según una de las reivindicaciones 1 ó 2, caracterizado porque dichos medios de tratamiento están dispuestos para mantener un conocimiento preciso de dicha dirección de transmisión, a partir de dichas mediciones de la variación de una de las diferencias de marcha primera y segunda.
4. Dispositivo según una de las reivindicaciones 1 a 3, caracterizado porque dichos primeros medios de medición (M1) están dispuestos para i) determinar las fases primera y segunda de las señales primeras y segundas recibidas por cada una de dichas antenas (A1-A3) de dicho conjunto procedentes de dicha otra nave espacial (Si'), ii) deducir de dichas fases primeras y segundas diferencias de fase primeras y segundas entre dicha antena de emisión/recepción (A1) y cada una de dichas antenas receptoras (A2, A3), iii) deducir de dichas diferencias de fase primeras y segundas terceras diferencias de fase correspondientes a dicha desviación de frecuencia, iv) deducir de diferencias de fase primeras o segundas consecutivas y de terceras diferencias de fase consecutivas mediciones de la variación de la diferencia de marcha primera o segunda, y v) deducir de las mediciones de la variación de la diferencia de marcha primera o segunda mediciones no ambiguas de dichas diferencias de marcha primera y segunda correspondientes a la frecuencia primera o segunda.
5. Dispositivo según una de las reivindicaciones 1 a 4, caracterizado porque comprende segundos medios de medición (M3) dispuestos para estimar la distancia que separa su nave espacial (Si) de dicha otra nave espacial (Si') del grupo, a partir de dichas señales primeras y/o segundas recibidas por al menos una de dichas antenas (A1-A3) procedentes de dicha otra nave espacial (Si'), y porque dichos medios de tratamiento (MT) están dispuestos para determinar las posiciones relativas de dichas naves espaciales (Si') con respecto a su nave espacial (Si), a partir de dichas distancias estimadas y de dicha dirección de transmisión estimada precisa.
6. Dispositivo según la reivindicación 5, caracterizado porque dichos segundos medios de medición (M3) están dispuestos para estimar la distancia que separa su nave espacial (Si) de dicha otra nave espacial (Si') del grupo, a partir de dichas señales primeras y/o segundas recibidas por al menos una de dichas antenas (A1-A3) procedentes de dicha otra nave espacial (Si'), y de señales auxiliares transmitidas por dicha otra nave espacial (Si') y representativas de la distancia que la separa de dicha nave espacial (Si).
7. Dispositivo según una de las reivindicaciones 5 ó 6, caracterizado porque dichos medios de tratamiento (MT) están dispuestos para corregir dicha medición de la distancia y/o dicha medición de la dirección de transmisión precisa de un efecto inducido por múltiples trayectorias, a partir de datos cartográficos almacenados y de dicha dirección de transmisión de las señales.
8. Dispositivo según una de las reivindicaciones 1 a 7, caracterizado porque comprende al menos dos conjuntos de antenas en al menos dos caras de orientaciones diferentes.
9. Dispositivo según una de las reivindicaciones 1 a 8, caracterizado porque comprende al menos una antena de emisión/recepción complementaria (A4) en al menos una cara desprovista de conjunto de antenas.
10. Dispositivo según una de las reivindicaciones 1 a 9, caracterizado porque dichas antenas (A1 -A3) son apropiadas para emitir y/o recibir señales primeras y segundas de radiofrecuencias que se presentan en forma de portadoras primera y segunda de las cuales al menos una está modulada por un código pseudoaleatorio elegido.
11. Dispositivo según una de las reivindicaciones 1 a 10, caracterizado porque dicha desviación de frecuencia corresponde a una longitud de onda de longitud al menos igual al doble de la distancia que separa dicha antena de emisión/recepción (A1) de cada una de dichas antenas receptoras (A2, A3).
12. Dispositivo según una de las reivindicaciones 1 a 11, caracterizado porque dichas antenas (A1-A3) están dispuestas para emitir/recibir portadoras primeras y segundas que presentan frecuencias primera y segunda que pertenecen a una banda de frecuencias elegida de un grupo que comprende las bandas S, SHF y EHF.
13. Dispositivo según la reivindicación 12, caracterizado porque dicha banda de frecuencia es la banda S.
14. Nave espacial (S1) destinada a desplazarse en formación dentro de un grupo de naves espaciales, caracterizada porque comprende un dispositivo de control (D) según una de las reivindicaciones anteriores.
15. Grupo de naves espaciales (Si), destinado a desplazarse según una formación elegida, caracterizado porque al menos una de dichas naves espaciales (S1) comprende un dispositivo de control (D) según una de las reivindicaciones 1 a 13, y porque al menos algunas de las otras naves espaciales (S2, S3) comprenden al menos una antena de emisión/recepción (A1) implantada en al menos una cara elegida.
Patentes similares o relacionadas:
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Métodos y aparatos para sistema de transporte aéreo distribuido, del 27 de Mayo de 2020, de Sunlight Aerospace Inc: Un método para el transporte aéreo distribuido, que comprende: la provisión de un vehículo de transporte aéreo con un ala y una envergadura, con capacidad para transportar […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]
Módulo de función de seguridad para un vehículo, del 12 de Febrero de 2020, de MBDA Deutschland GmbH: Módulo de función de seguridad para un vehículo , que comprende: una unidad de determinación de estado que está configurada […]
Procedimiento y dispositivo de navegación autónoma, del 1 de Enero de 2020, de ALERION TECHNOLOGIES, S.L: Un procedimiento de navegación autónoma para rastrear objetos de una turbina eólica, comprendiendo el procedimiento: - calibrar un sensor de visión artificial y un sensor […]
Procedimiento y sistema para el guiado, en la fase terminal, de un misil interceptor hacia un objetivo aéreo móvil, del 11 de Diciembre de 2019, de MBDA FRANCE: Procedimiento para el guiado, en la fase terminal de un misil interceptor hacia un objetivo aéreo, incluyendo dicho misil interceptor: · instrumentos de abordo […]