DETECCION DE PERFIL DE RUTA.
Un aparato para la predicción del perfil de ruta por delante de un vehículo que comprende:
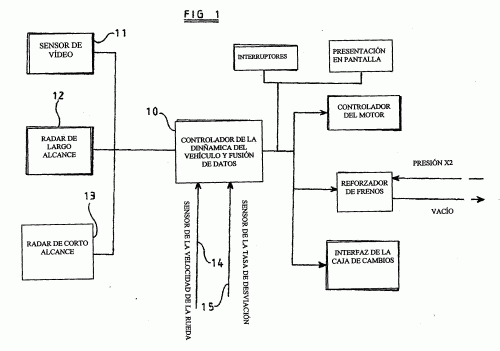
medios de digitalización y almacenamiento operables para digitalizar y almacenar sucesivos cuadros datos de imagen de vídeo en coordenadas de pantalla (X, Y) donde cada cuadro contiene puntos característicos y un horizonte de imagen de pantalla (H), relacionados con la carretera por delante del vehículo utilizando algoritmos de detección de bordes; y medios de procesamiento (10) operables para procesar los datos de imagen de vídeo a fin de identificar marcas de carril en la carretera, donde el procesador incluye:
I) una transformación de perspectiva inversa (ecuación 1) operativa para transformar los puntos característicos según coordenadas de pantalla (X, Y) en coordenadas reales basadas en la carretera (x, z) con referencia al horizonte de la imagen de pantalla;
II) una expresión de restricción espacial (ecuación 2) para los desplazamientos de las marcas de carril derecha e izquierda (c1), el ángulo de dirección del carril (c2) y la curvatura del carril (c3); y
III) medios de estimación para analizar simultáneamente pares de líneas que se considera constituyen marcas de carril tomando en cuenta los cuadros de vídeo actual y anterior (k; k-1) por medio de un solo procedimiento recursivo de estimación para encontrar la mejor concordancia con una expresión (ecuación 3) que incluye los desplazamientos de las marcas de carril izquierda y derecha, el ángulo de dirección del carril, la curvatura del carril y un error de horizonte H; en los que el medio de procesamiento (10) es operativo para obtener el efecto del error de horizonte aplicando la transformación de perspectiva inversa a la expresión de restricción espacial, proporcionando así dicha expresión (ecuación 3) con las coordenadas corregidas (X0;Z0) de los puntos característicos.
Tipo: Resumen de patente/invención.
Solicitante: LUCAS INDUSTRIES LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: 46 PARK STREET,LONDON W1Y 4DJ.
Inventor/es: HERMANS, FILIP, JOZEF, JOHAN.
Fecha de Publicación: .
Fecha Solicitud PCT: 26 de Febrero de 1999.
Fecha Concesión Europea: 24 de Agosto de 2005.
Clasificación Internacional de Patentes:
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
- G06T7/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
Países PCT: Alemania, España, Francia, Reino Unido, Italia, Oficina Europea de Patentes.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]