SISTEMA DETECTOR DE OBSTACULOS BASADO EN TECNOLOGIA LASER.
La actual instancia por la que se solicita la patente consiste en la fabricación de un sistema detector de obstáculos basado en tecnología láser (puntero láser) así como la electrónica asociada para un correcto y adecuado funcionamiento del mismo.
Este sistema puede formar parte de cualquier vehículo capaz de moverse por sí mismo alrededor de un entorno, con presencia de obstáculos diversos.
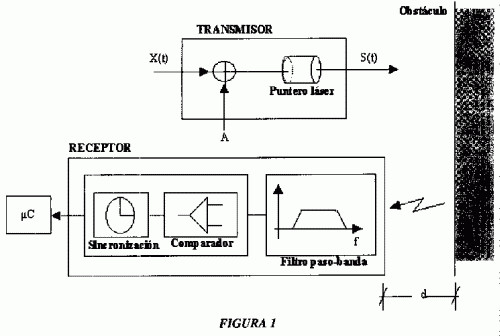
El detector de obstáculos está principalmente compuesto por dos bloques funcionales: transmisor y receptor.
La base técnica en la que se sustenta el diseño consiste en la emisión de un rayo láser y la recepción de la potencia reflejada en cualquier posible obstáculo. Utilizando este método, el receptor es capaz de hacer una estimación de la distancia del vehículo al obstáculo dependiendo de la potencia recibida.
Tipo: Resumen de patente/invención.
Solicitante: UNIVERSIDAD DE ALCALA..
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: GOMEZ PLAZA,MARIANO, SANCHEZ PRIETO,SEBASTIAN, GARCIA DAVILA,OSCAR, MEZIAT LUNA,DANIEL.
Fecha de Solicitud: 23 de Mayo de 2001.
Fecha de Publicación: .
Fecha de Concesión: 16 de Septiembre de 2004.
Clasificación Internacional de Patentes:
- G01C3/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Medida de distancias en línea de vista; Telémetros ópticos (cintas, cadenas o ruedas para la medida de la longitud G01B 3/00; sistemas de triangulación activos, p. ej. que utilizan la transmisión y reflexión de ondas electromagnéticas que no sean ondas de radio, G01S 17/48).
- G01S17/93 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › como anti-colisión.
Patentes similares o relacionadas:
Procedimiento para la detección y localización de un garaje y vehículo, del 6 de Mayo de 2020, de AUDI AG: Procedimiento para la detección y localización de al menos un garaje que ofrezca una plaza de aparcamiento para un vehículo en el vehículo , en donde el vehículo […]
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
Método para procesar pulsos de eco de un sensor láser 3d activo para proporcionar mediciones de distancia, del 24 de Julio de 2019, de HENSOLDT Sensors GmbH: Un método para procesar pulsos de eco de un sensor 3D activo para proporcionar mediciones de distancia del entorno frente al sensor, que comprende las siguientes […]
Sistema de seguimiento dinámico y método de guiado automático basado en cámaras 3D de tiempo de vuelo, del 3 de Abril de 2019, de Terabee S.A.S: Un sistema [Fig. 1, ] de seguimiento dinámico que comprende: - una cámara [Fig. 1, ] tridimensional basada en tecnología de tiempo […]
 Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento y disposición para desarrollar un modelo tridimensional de un entorno, del 13 de Diciembre de 2018, de Vricon Systems Aktiebolag: Procedimiento para desarrollar un modelo 3D de un entorno, que comprende las etapas de: proporcionar una pluralidad de imágenes superpuestas del entorno […]
Luna con campo sensor ópticamente transparente, del 1 de Junio de 2016, de SAINT-GOBAIN GLASS FRANCE: Luna en forma de luna de parabrisas, o bien de una luna trasera de un vehículo, con un campo sensor ópticamente transparente, comprendiendo: a) al menos una […]
 Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]
Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]