ROBOT TREPADOR PARALELO PARA EL MANTENIMIENTO DE ESTRUCTURAS TUBULARES.
1. Robot trepador paralelo para el mantenimiento de estructuras tubulares:
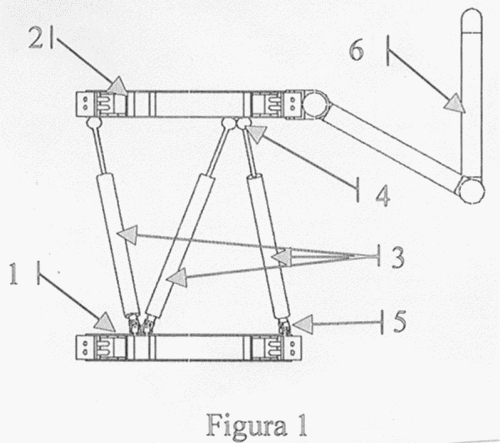
Caracterizado por ser del tipo de los constituidos por dos anillos (1) y (2) unidos entre sí mediante seis accionamientos lineales de potencia (3), los cuales se conectan a los mencionados anillos (1) y (2) a través de las juntas esféricas (5) y las juntas universales (4) acopladas en los extremos de cada uno de los seis accionamientos lineales (3).
2. Robot trepador paralelo para el mantenimiento de estructuras tubulares: según reivindicación anterior, caracterizado por que cada uno de los anillos estructurales (1) y (2) están articulados en su parte media mediante un mecanismo de apertura y cierre (8), del tipo de bisagra y pasador.
3. Robot trepador paralelo para el mantenimiento de estructuras tubulares: según reivindicaciones anteriores, caracterizado por que cada uno de los anillos estructurales (1) y (2) incorporan los dispositivos (10) que son del tipo de desplazamiento lineal accionados con motores que dan lugar a movimientos en dirección radial hacia el interior o exterior de los anillos (1) y (2) en orden a conseguir anclaje y fijación entre los anillos (1) y (2) y la estructura tubular (12).
4. Robot trepador paralelo para el mantenimiento de estructuras tubulares: según reivindicaciones anteriores, caracterizado por que en los anillos estructurales (1) ó (2) lleva incorporados los apéndices mecánicos (11), estando estos apéndices dotados de taladros para tornillos de fijación destinados a acoplar el brazo robotizado (6) de cinco articulaciones, el brazo robotizado (6) incorpora en cada articulación servomotores y sensores de posición disponiéndose en su extremo de una pinza motorizada (7) para herramientas.
Tipo: Resumen de patente/invención.
Solicitante: ARACIL SANTOJA,RAFAEL
SALTAREN PAZMIO,ROQUE JACINTO.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: SALTAREN PAZMIO,ROQUE JACINTO.
Fecha de Solicitud: 28 de Mayo de 2001.
Fecha de Publicación: .
Fecha de Concesión: 21 de Junio de 2002.
Clasificación Internacional de Patentes:
- B62D57/024 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075; coches que permiten subir o bajar un tramo de escalera B62B 5/02).
Patentes similares o relacionadas:
Sistema robótico y métodos para tareas de mantenimiento en farolas y estructuras verticales de forma cónica, del 11 de Mayo de 2020, de FCC INDUSTRIAL E INFRAESTRUCTURAS ENERGETICAS, S.A.U: Un sistema robótico destinado a realizar de manera autónoma las tareas de mantenimiento de farolas o estructuras verticales con forma cónica o similar, como por ejemplo el pintado […]
Sistema de desplazamiento para superficies cilíndricas y/o cónicas, del 17 de Julio de 2019, de Fachhochschule Aachen: Sistema de desplazamiento para superficies cilíndricas y/o cónicas, en particular para la superficie exterior o la superficie interior de un conducto o poste […]
Cabezal limpiador para limpiar una superficie, dispositivo que comprende dicho cabezal limpiador y método de limpieza, del 20 de Febrero de 2019, de Fleet Cleaner Holding B.V: Cabezal limpiador para limpiar una superficie, tal como el casco de un barco, comprendiendo el cabezal limpiador: - un bastidor que comprende un eje […]
Robot escalador para mástiles, del 7 de Marzo de 2018, de Fachhochschule Aachen: Robot escalador para mástiles/torres , en particular para aerogeneradores, que comprende al menos un primer dispositivo de soporte y al […]
Dispositivo para salvar un obstáculo durante el desplazamiento, del 1 de Febrero de 2017, de VORWERK & CO. INTERHOLDING GMBH: Aparato de limpieza de suelos de desplazamiento automático con un dispositivo para salvar un obstáculo durante el desplazamiento, presentando el […]
Máquina-útil que comprende un carril longitudinal y un brazo transversal, del 24 de Agosto de 2016, de AIRBUS OPERATIONS: Máquina-útil para la realización de operaciones sobre una pieza que comprende: * un carril longitudinal configurado para ser posicionado frente a la pieza, […]
Robot magnético móvil con hueco de aire, del 18 de Febrero de 2015, de Chariot Robotics, LLC: Un robot magnético móvil para decapar revestimientos desde una pieza de trabajo ferro-magnética que comprende un chasis, en el que dicho chasis […]
Instalación para el montaje de piezas de carrocería, del 16 de Octubre de 2013, de ThyssenKrupp System Engineering GmbH: Instalación para el montaje de una carrocería de vehículo, que comprende: - una estación de mecanización para el montaje y/o mecanización de piezas de la carrocería, a […]