SISTEMA DE POSICIONAMIENTO SIN ANCLAS PARA EMBARCACIONES.
Lancha (10) que comprende un sistema de control (40) para controlar un primer motor eléctrico (30.
1) y para tratar información de posicionamiento por satélite, por lo que el sistema de control (40) es capaz de corregir la posición de la lancha (10) activando dicho primer motor eléctrico (30.1) si la información de posicionamiento por satélite indica que la lancha (10) ha abandonado su posición original, caracterizada porque
- la lancha comprende un segundo motor eléctrico (30.2) similar al primer motor eléctrico (30.1), - estando dispuestos dicho primer motor eléctrico (30.1) y dicho segundo motor eléctrico (30.2) simétricamente con respecto al eje geométrico de la lancha (10),
- activando dicho sistema de control (40) a dicho primer motor eléctrico (30.1) y a dicho segundo motor eléctrico (30.2) con el fin de compensar desplazamientos posicionales.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/059837.
Solicitante: Code-X AG.
Nacionalidad solicitante: Suiza.
Dirección: Naumatthalde 11 6045 Meggen SUIZA.
Inventor/es: SUTER, ESKIL, SUTER,David.
Fecha de Publicación: .
Fecha Solicitud PCT: 18 de Septiembre de 2007.
Clasificación PCT:
B63H25/42TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 25/00 Gobierno; Disminución de marcha utilizando medios distintos a los elementos propulsores (que emplean unidades de propulsión fueraborda instaladas de forma amovible B63H 20/00 ); Anclaje o amarre dinámico, es decir, posicionamiento de los buques por medio de elementos propulsores auxiliares o principales. › Gobierno o anclaje dinámico por elementos propulsores (con la ayuda de chorros B63H 25/46 ); Gobierno o anclaje dinámico por hélices utilizadas únicamente con este fin; Gobierno o anclaje dinámico por timones que llevan las hélices.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
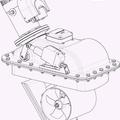
Sistema de posicionamiento sin anclas para embarcaciones El invento se refiere a un sistema de posicionamiento sin anclas para embarcaciones, diseñado para mantener una posición geográfica fija de una embarcación sin emplear las anclas o los pesos tradicionales, adecuado para ser utilizado en una embarcación del tipo catamarán. Se reivindica en este caso la prioridad de la solicitud de patente alemana número DE10 2007 037 828.0, presentada el 10 de Agosto de 2007, titulada "Doppelrumpfmotorboot" ("Embarcación a motor con doble casco") Las lanchas rápidas (para altas velocidades) son, típicamente, muy difíciles de gobernar y, por ello, con frecuencia solamente son utilizadas por expertos. El diseño completo y la configuración de estas lanchas son tales que para intervenir en carreras a gran velocidad, se prevé un sistema muy rígido. La comodidad de los pasajeros y la facilidad de gobierno son cuestiones que, típicamente, no se tienen en consideración, ya que las medidas respectivas incrementarían el peso y las dimensiones de tales lanchas. Sin embargo, se presentan situaciones en las que la lancha rápida ha de ser hecha funcionar lo mismo que muchas otras lanchas, a saber cuando se entra en un puerto o cuando se realiza la aproximación a un embarcadero, por ejemplo. Pero, también, cuando se utiliza la lancha para tomar el sol o para nadar, los elementos que constituyen los elementos de alta velocidad de la lancha, estorban bastante. Por ejemplo, resulta muy difícil el acceso a la cabina de pasajeros de una lancha rápida y, típicamente, la puerta o la escotilla de entrada es pequeña. Dicho de otro modo, una lancha rápida no ofrece, típicamente, un entorno lujoso ni elementos que puedan hacer confortables los viajes con ella realizados. Por otro lado, las confortables lanchas de recreo carecen de la capacidad para alcanzar altas velocidades de una lancha rápida, lo que limita su uso como medios efectivos para el transporte a un área geográfica muy confinada. Otro inconveniente importante, común a la mayoría de las lanchas rápidas y de otras embarcaciones, es la necesidad de utilizar un ancla tradicional cuando se desea mantener una posición relativamente fija de la lancha. Tal sistema de anclaje tradicional tiene muchas desventajas, como su peso, unas necesidades de almacenamiento que reducen el volumen interno utilizable de la embarcación, la laboriosa y larga tarea que supone el echar/izar el ancla y, en algunas áreas frágiles desde el punto de vista ambiental, como los arrecifes coralinos, el uso de estas anclas tradicionales está estrictamente prohibido. Se han realizado unos pocos intentos para proporcionar un sistema de posicionamiento para una lancha sin utilizar anclas, como el reivindicado en la patente norteamericana 5491636. El dispositivo reivindicado en esta solicitud de patente utiliza un propulsor de empuje en conjunto con el posicionamiento por satélite para compensar el movimiento relativo de la lancha. La principal desventaja de este sistema es que el propulsor de empuje tiene que poder ser hecho girar, lo complica la disposición y hace que sea imperativa la utilización de los denominados colectores con el fin de permitir una conexión eléctrica continua entre el propulsor de empuje y otros componentes de la disposición, como la fuente de potencia y la electrónica de control. Por otra parte, el uso de los corrientes sistemas de posicionamiento sin anclas no resulta muy eficaz debido al hecho de que cuando se compensa la deriva de la embarcación, debido a la inercia, tras una compensación de la deriva inicial, se produce el denominado efecto de sobrecompensación, es decir, la embarcación tiende a manifestar una deriva en dirección contraria a la deriva inicial que, de nuevo, tiene que corregirse. Estas derivas adicionales en direcciones contrarias, aún cuando sean de menor magnitud, hacen que el sistema sea muy poco eficaz debido a que los propulsores de empuje tienen que conectarse y desconectarse frecuentemente y tienen que ser hechos girar con frecuencia. Asimismo, los sistemas corrientemente disponibles no resultan adecuados para ser utilizados en lanchas con dos cascos espacialmente separados, por ejemplo, los catamaranes. El objeto del presente invento es, por tanto, proporcionar un sistema de posicionamiento para una embarcación sin anclas, sumamente eficaz y respetuoso con el entorno, que sea adecuado para su empleo en una lancha del tipo catamarán. SUMARIO DEL INVENTO Los objetos anteriormente mencionados se consiguen, merced al presente invento, empleando dos motores eléctricos separados espacialmente en una disposición de auto-compensación, diferencial, controlada mediante un sistema de control que actúa basándose en información de posicionamiento por satélite. El dispositivo de acuerdo con el presente invento permite el mantenimiento automático de la posición, libre de interacciones, de una lancha, proporcionando una función muy similar en comparación con un sistema de anclas clásico, sin los inconvenientes previamente mencionados que presentan estos sistemas de anclaje tradicionales. 2 E07803540 17-11-2011 El sistema de posicionamiento sin anclas para embarcaciones es un sistema activo que vigila constantemente la posición de la embarcación y responde inmediatamente a cualquier deriva respecto de la posición predefinida emitiendo señales de control para los motores eléctricos que, cuando se ponen en marcha, son capaces de proporcionar un empuje suficiente en la dirección deseada para mover la embarcación de vuelta a la posición predefinida. La disposición que incluye dos motores separados espacialmente es particularmente ventajosa ya que tal disposición elimina la posibilidad de que la lancha gire indeseablemente y, también, reduce o elimina por completo el riesgo de sobrecompensación y, por ello, el balanceo continuo de la embarcación. De acuerdo con una realización preferida del presente invento, se utilizan hélices cicloidales, que son las preferidas en áreas en las que han de evitarse las turbulencias creadas por las hélices usuales. Estas áreas incluyen las áreas frágiles desde el punto de vista ambien- tal, antes mencionadas, como los arrecifes de coral, pero también los canales artificiales o incluso naturales pero poco profundos y, también, los alrededores de las playas y de las islas artificiales en donde, debido a las turbulencias, podría producirse el traslado de arena o de otros sedimentos. Así, la elección de emplear hélices cicloidales contribuye a la versatilidad del sistema y a su diversificado campo de utilización. En la realización preferida del presente invento, los motores eléctricos van acompañados por motores de combustión interna de gran potencia, separados, que se utilizan para la navegación a alta velocidad de la lancha, mientras los motores eléctricos se mantienen, de preferencia, retraídos en el casco de la lancha de manera que las partes sumergidas de la lancha no supongan obstáculos cuando se navega con la lancha en el modo de alta velocidad. En otra realización del invento, el sistema también es capaz de reducir el balanceo de la embarcación midiendo la tendencia al balanceo y haciendo que los motores eléctricos dirijan su empuje de tal forma que se compense dicha tendencia al balanceo de la embarcación. Esta característica incrementa la comodidad de los pasajeros mientras la embarcación está "fondeada" o en un denominado modo de funcionamiento en marcha lenta. Breve descripción de los dibujos Para conseguir una comprensión más completa del presente invento y para entender otros objetos y ventajas del mismo, se hace referencia a la siguiente descripción, tomada en conjunto con los dibujos anejos, en los que: la figura 1 es una vista en perspectiva de una realización del invento; la figura 2A es una sección transversal de la lancha representada en la fig. 1, en la que los dos motores eléctricos se muestran en posición bajada; la figura 2B es una vista desde abajo, en perspectiva, de la lancha ilustrada en la fig. 1, con los dos motores eléctricos representados en posición bajada; la figura 3 es una vista esquemática, desde arriba, de la lancha mostrada en la fig.1, en la que se muestran las posiciones de los dos motores de gran potencia y de los dos motores eléctricos; la figura 4 es una sección transversal parcial, esquemática, de la lancha, en la que se muestra uno de los motores eléctricos montado en el casco de la lancha; la figura 5 es una vista desde arriba de la lancha representada en la fig. 1, en la que se indican los sentidos de rotación y los ejes geométricos de movimiento lateral; la figura 6 es un diagrama estructural de los componentes principales de acuerdo con el presente invento; la figura 7 es una gráfica de proceso que ilustra el procedimiento de posicionamiento sin anclas de la embarcación. Descripción detallada El presente... [Seguir leyendo]
Reivindicaciones:
1. Lancha (10) que comprende un sistema de control (40) para controlar un primer motor eléctrico (30.1) y para tratar información de posicionamiento por satélite, por lo que el sistema de control (40) es capaz de corregir la posición de la lancha (10) activando dicho primer motor eléctrico (30.1) si la información de posicionamiento por satélite indica que la lancha (10) ha abandonado su posición original, caracterizada porque - la lancha comprende un segundo motor eléctrico (30.2) similar al primer motor eléctrico (30.1), - estando dispuestos dicho primer motor eléctrico (30.1) y dicho segundo motor eléctrico (30.2) simétricamente con respecto al eje geométrico de la lancha (10), - activando dicho sistema de control (40) a dicho primer motor eléctrico (30.1) y a dicho segundo motor eléctrico (30.2) con el fin de compensar desplazamientos posicionales. 2. La lancha (10) de la reivindicación 1, caracterizada porque comprende además medios (59) para determinar la orientación de la lancha. 3. La lancha (10) de la reivindicación 2, caracterizada porque dichos medios (59) para determinar la orientación de la lancha son una brújula digital. 4. La lancha (10) de la reivindicación 2, caracterizada porque dichos medios (59) para determinar la orientación de la lancha son un perceptor giroscópico. 5. La lancha (10) de la reivindicación 4, caracterizada porque utilizando información proporcionada por el perceptor giroscópico el sistema de control (40) es capaz de reducir el movimiento de balanceo de la lancha (10) controlando el primer motor eléctrico (30.1) y el segundo motor eléctrico (30.2). 6. La lancha (10) de la reivindicación 2, caracterizada porque dichos medios (59) para determinar la orientación de la lancha son una disposición de, al menos, dos receptores (58) de información de posicionamiento por satélite situados espacialmente separados a una distancia mayor que el error esperado de la información de posicionamiento por satélite. 7. La lancha (10) de una de las reivindicaciones precedentes, caracterizada porque comprende - un sistema de almacenamiento (56) para almacenar energía eléctrica, - un panel solar (14) para convertir los rayos solares en energía eléctrica, por lo que dicho sistema de almacenamiento (56) y dicho panel solar (14) están conectados de manera que la energía eléctrica proporcionada por el cita- do panel solar (14) se almacena en el sistema de almacenamiento (56) y la energía eléctrica obtenida a partir de dicho sistema de almacenamiento (56) es aplicable a dicho primer motor eléctrico (30.1) y a dicho segundo motor eléctrico (30.2). 8. La lancha (10) de una de las reivindicaciones precedentes, caracterizada porque dicho sistema de control (40) es capaz de activar dicho primer motor eléctrico (30.1) y dicho segundo motor eléctrico (30.2) con energía eléctrica obtenida a partir de dicho sistema de almacenamiento (56). 9. La lancha (10) de una de las reivindicaciones precedentes, caracterizada porque dicho sistema de control (40) ofrece un modo de funcionamiento con anclaje virtual que es un modo de funcionamiento libre de emisiones. 10. La lancha (10) de una de las reivindicaciones precedentes, caracterizada porque es un catamarán que comprende, además, un casco izquierdo (11.1) y un casco derecho (11.2), en la que el primer motor eléctrico (30.1) y el segundo motor eléctrico (30.2) están montados, espacialmente separados, en el casco izquierdo (11.1) y en el casco derecho (11.2), respectivamente. 11. La lancha (10) de una de las reivindicaciones precedentes, caracterizada porque dicho primer motor eléctrico (30.1) y dicho segundo motor eléctrico (30.2) comprenden hélices cicloidales. 12. La lancha (10) de una de las reivindicaciones precedentes, caracterizada porque, cuando no se utilizan, dicho primer motor eléctrico (30.1) y dicho segundo motor eléctrico (30.2) pueden ser retraídos por completo al interior de un caso de la lancha (10). 13. La lancha (10) de una de las reivindicaciones precedentes, caracterizada porque todos los motores de la citada lancha (10) están situados en el tercio trasero de la lancha (10) 8 E07803540 17-11-2011 9 E07803540 17-11-2011 E07803540 17-11-2011 11 E07803540 17-11-2011 12 E07803540 17-11-2011 13 E07803540 17-11-2011
Patentes similares o relacionadas:
Sistema de suministro de energía de una embarcación flotante, del 17 de Junio de 2020, de Siemens Energy AS: Un sistema de suministro de energía de una embarcación flotante, en particular, de una embarcación de posicionamiento dinámico en mar abierto, que comprende:
- al menos […]
Dispositivo flotante generador de energía eólica, del 11 de Septiembre de 2019, de University Of Ulsan Foundation For Industry Cooperation: Un dispositivo flotante generador de energía eólica que comprende:
un cuerpo principal flotante que tiene flotabilidad, de forma que flote sobre el mar, y tiene una […]
Procedimiento para el atraque operado a motor, del 22 de Mayo de 2019, de Kuhn, Andreas: Procedimiento para el atraque operado a motor con un barco , en particular un yate, en un punto de atraque en una zona de atraque, donde en una etapa de elaboración […]
Vehículo mejorado para su uso en agua, en particular en el mar, del 3 de Abril de 2019, de Crazy Dolphin S.r.l: Un vehículo para su uso en agua por un usuario, que comprende:
• una tabla flotante ,
• un componente de cola , acoplado a dicha placa ,
[…]
Propulsión azimutal modular, del 9 de Enero de 2019, de ROLLS-ROYCE MARINE AS: Un propulsor azimutal para propulsar una embarcación, que tiene una carcasa de propulsor alrededor de la que fluye agua, y que comprende:
- […]
Propulsor retráctil, del 21 de Noviembre de 2018, de LEWMAR LIMITED: Un conjunto de propulsor para una embarcación marina, que comprende:
una unidad de hélice ,
un motor ,
un eje de accionamiento que une el motor […]
PROPULSOR PORTÁTIL DE MANIOBRA, del 24 de Mayo de 2018, de RESINO BODAS, Santiago: El dispositivo se concreta en una hélice de maniobra, accionada por un motor eléctrico, de 12 o 24 voltios que se lleva en la embarcación a modo […]
SISTEMA DE RECUPERACIÓN DE ENERGÍA CINÉTICA EN UN BARCO, del 12 de Abril de 2018, de GARCIA LAGE, Gerardo: La presente Invención se reitere a un método y un sistema de recuperación de energía cinética en un barco que comprende; un conducta , practicado en el […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Propulsor retráctil, del 21 de Noviembre de 2018, de LEWMAR LIMITED: Un conjunto de propulsor para una embarcación marina, que comprende:
una unidad de hélice ,
un motor ,
un eje de accionamiento que une el motor […]
Propulsor retráctil, del 21 de Noviembre de 2018, de LEWMAR LIMITED: Un conjunto de propulsor para una embarcación marina, que comprende:
una unidad de hélice ,
un motor ,
un eje de accionamiento que une el motor […]