PROCEDIMIENTO DE VIGILANCIA EN CARRETERA PARA VEHICULO DE CARRETERA QUE SE ADAPTA AL ESTADO Y A LA NATURALEZA DE REVESTIMIENTO.
Procedimiento de vigilancia en carretera de un vehículo de carretera apto para desplazarse sobre una superficie de rodadura (10) y que comprende al menos un sensor (C1) orientado hacia esta superficie de rodadura (10),
en el cual:
- se ilumina una sección (11) de la superficie de rodadura (10) situada enfrente del sensor (C1) con un emisor de ondas (20) de este sensor (C1);
- se captan las ondas reflejadas por la sección (11) con un receptor (30) del sensor (C1) que produce una señal (A) que tiene una amplitud dependiente de la intensidad de las ondas captadas;
y caracterizado por que comprende una operación de tratamiento de la señal (A) procedente del sensor, en el transcurso de la cual:
- se detecta la naturaleza de la superficie de rodadura (10) identificando transiciones entre una primera y una segunda naturaleza de superficie de rodadura por comparación de una media deslizante de varios valores de amplitudes de la señal procedente del receptor (30) en instantes sucesivos, con un umbral de transición;
- se elige entre al menos dos juegos de umbrales de detección predeterminados aquél correspondiente a la naturaleza de la superficie de rodadura detectada;
- se identifica un marcado sobre la superficie de rodadura cuando la señal (A) reflejada tiene una amplitud superior a un valor umbral predeterminado del juego de umbrales de detección elegido
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03290562.
Solicitante: PEUGEOT CITROEN AUTOMOBILES SA.
Nacionalidad solicitante: Francia.
Dirección: 65-71, BOULEVARD DU CH TEAU,92200 NEUILLY SUR SEINE.
Inventor/es: HESPEL,DENIS, CHARTON,STEPHANE, LARDENNOIS,XAVIER.
Fecha de Publicación: .
Fecha Solicitud PCT: 7 de Marzo de 2003.
Fecha Concesión Europea: 17 de Febrero de 2010.
Clasificación Internacional de Patentes:
- G01S17/88 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
Clasificación PCT:
- G01S17/88 G01S 17/00 […] › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
Clasificación antigua:
- G01S17/88 G01S 17/00 […] › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento de vigilancia en carretera para vehículo de carretera que se adapta al estado y a la naturaleza de revestimiento.
La invención se refiere en general a los procedimientos de vigilancia en carretera de vehículos de carretera.
De modo más preciso, la invención se refiere a un procedimiento de vigilancia en carretera de un vehículo de carretera apto para desplazarse sobre una superficie de rodadura y que comprende al menos un sensor orientado hacia esta superficie de rodadura, comprendiendo el procedimiento una operación consistente en iluminar una sección de la superficie de rodadura situada enfrente del sensor por un emisor de ondas de este sensor, una operación consistente en captar las citadas ondas emitidas por el emisor y reflejadas por la sección con la ayuda de un receptor del sensor que produce una señal de amplitud función de la intensidad de las ondas captadas, una operación de tratamiento de la señal producida por el receptor que permite detectar marcas sobre la superficie de rodadura por comparación de la amplitud de la señal con un juego de umbrales de detección, y una operación de detección y de elección que consiste en detectar la naturaleza y/o el estado de la superficie de rodadura y en adaptar los umbrales de detección del citado juego en función de la naturaleza y/o del estado de la superficie de rodadura.
Procedimientos de este tipo son conocidos en la técnica anterior, en particular por la patente europea EP 0 860 001, que revela la utilización de varios sensores en un mismo vehículo, que comprenden, cada uno, un emisor de infrarrojos y un receptor correspondiente. La intensidad de la señal recibida por los receptores varía en función de la reflectividad de la superficie iluminada por el emisor, lo que permite detectar las discontinuidades del revestimiento de la superficie de rodadura. Las aplicaciones citadas en la patente son múltiples. Una primera aplicación es la detección de la presencia de cuerpos extraños en la calzada, como arena, hierba o placas de nieve. Otra aplicación consiste en advertir al conductor de un desvío de trayectoria que lleve al vehículo a cruzar una línea blanca continua. Una última aplicación consiste en leer códigos constituidos por marcas. dispuestas en la calzada, para prevenir al conductor por ejemplo de un cambio en la limitación de velocidad o de la aproximación de un cruce.
Las discontinuidades, tales como las marcas en la superficie de rodadura, son detectadas de modo muy simple, por comparación del valor de la señal recibida por el receptor de cada sensor con un valor umbral. Si la señal detectada sobrepasa el valor umbral, se considera por ejemplo que el sensor ha detectado una marca en el suelo, más clara que la calzada, por tanto más reflectora.
Para conseguir en el conjunto de la red de carreteras las prestaciones de detección requeridas, es importante tener en cuenta que los diferentes revestimientos, por ejemplo asfalto u hormigón, presentan diferencias importantes de reflectividad frente a la radiación infrarrojo incidente, y que esta reflectividad varía igualmente según que el revestimiento esté seco o húmedo.
Así pues, el valor umbral utilizado es adaptado permanentemente para tener en cuenta las condiciones climáticas y la naturaleza del revestimiento de la superficie de rodadura. A tal fin, se efectúa una medición diferencial del poder reflectante medio detectado de la superficie de rodadura y del poder reflectante de las discontinuidades detectadas. El poder reflectante medio de la superficie de rodadura se evalúa haciendo la media de los valores obtenidos por los diferentes detectores que ven esta superficie de rodadura.
Esta estrategia para adaptar el valor umbral al estado y a la naturaleza de la superficie de rodadura presenta defectos. Es cara, porque implica la utilización de varios sensores, al menos uno para medir el poder reflectante de la superficie de rodadura y uno para medir el poder reflectante de las discontinuidades. Es igualmente compleja, puesto que implica una adaptación permanente de los umbrales por un tratamiento lógico suplementario de las informaciones recogidas por los sensores, lo que aumenta el riesgo de fallo de funcionamiento del procedimiento y aumenta la complejidad y el coste de la programación de los materiales necesarios para la puesta en práctica de este procedimiento.
En este contexto, el objeto de la invención es paliar los defectos anteriormente mencionados.
A tal efecto, el procedimiento de la invención, por otra parte de acuerdo con la definición genérica que de él se da en el preámbulo anterior, está caracterizado esencialmente por que la citada operación de detección y de elección realiza una elección entre varios juegos de umbrales diferentes, estando predeterminados los valores de los umbrales de cada juego, en función de la naturaleza y/o del estado de la superficie de rodadura.
En un modo de realización posible de la invención, la citada operación de detección y de elección realiza una elección entre al menos un primer juego de umbrales de detección de valores predeterminados, correspondiente a una superficie de rodadura de asfalto, y un segundo juego de umbrales de detección de valores predeterminados diferentes, correspondiente a una superficie de rodadura de hormigón.
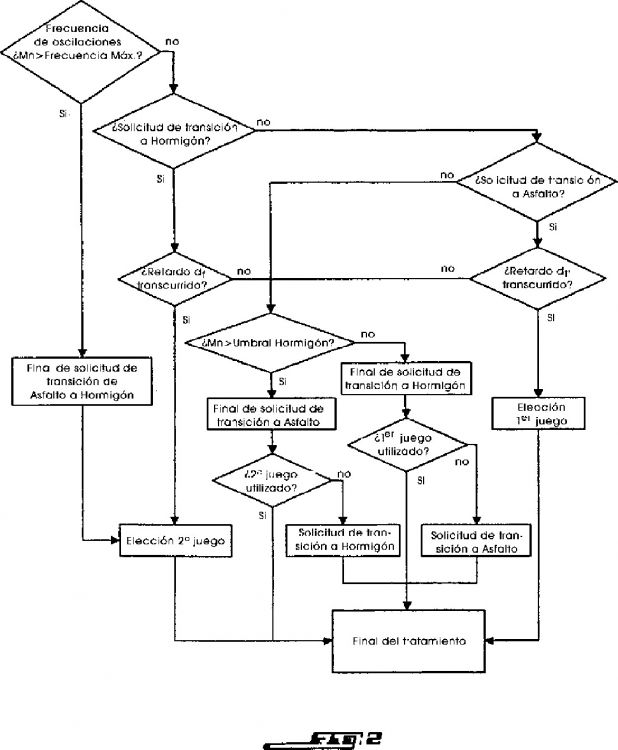
Ventajosamente, la citada operación de tratamiento de la señal puede comprender una etapa de adquisición de los valores de la amplitud de la señal en instantes de adquisición sucesivos separados por un período constante, y una etapa de cálculo en cada instante de adquisición de una media deslizante de los n últimos valores adquiridos, y la citada operación de detección y de elección puede comprender una primera prueba efectuada en cada instante de adquisición, positiva si la media deslizante es superior a un primer umbral de transición de valor predeterminado, negativa si no, una etapa de solicitud de transición a hormigón si esta última prueba es positiva en un instante de adquisición y si en este mismo instante de adquisición se utiliza el primer juego de umbrales de detección para la operación de tratamiento de la señal, y una etapa de solicitud de transición a asfalto si en un instante de adquisición esta prueba es negativa y si en este mismo instante de adquisición se utiliza el segundo juego de umbrales de detección para la operación de tratamiento de la señal.
Preferentemente, la operación de detección y de elección puede conducir a la elección del segundo juego de umbrales de detección correspondiente a una superficie de rodadura de hormigón si en un instante de adquisición se ha efectuado una solicitud de transición a hormigón y si la primera media deslizante permanece continuamente superior al primer umbral de transición durante una primera duración predeterminada siguiente al citado instante de adquisición.
Por ejemplo, la operación de detección y de elección puede conducir a la elección del primer juego de umbrales de detección correspondiente a una superficie de rodadura de asfalto si en un instante de adquisición se ha efectuado una solicitud de transición a asfalto y si la primera media deslizante permanece continuamente inferior al primer umbral de transición durante una segunda duración predeterminada siguiente al citado instante de adquisición.
Ventajosamente, las primeras y segundas duraciones predeterminadas pueden ser al menos iguales a un segundo.
Preferentemente, la operación de detección y de elección puede comprender una segunda prueba efectuada en cada instante de adquisición, positiva si la primera media deslizante oscila alrededor del primer umbral de transición con una frecuencia superior a un segundo umbral de transición, negativa si no, y que conduce a la elección del segundo juego de umbrales de detección correspondiente a una superficie de rodadura de hormigón si esta segunda prueba es positiva.
Por ejemplo, los citados primer y segundo juego de umbrales de detección pueden estar adaptados a superficies de rodadura secas respectivamente de asfalto y de hormigón, y la operación de detección y de elección puede comprender una etapa de detección del estado de la superficie de rodadura, seca o húmeda, y una etapa de elección ya sea de este primer y segundo juego de umbrales de detección o bien de un tercer y un cuarto juego de umbrales de detección de valores predeterminados adaptados para superficies de rodadura húmedas respectivamente de asfalto y de hormi- gón.
Ventajosamente, la operación de detección puede consistir en observar la frecuencia de barrido de...
Reivindicaciones:
1. Procedimiento de vigilancia en carretera de un vehículo de carretera apto para desplazarse sobre una superficie de rodadura (10) y que comprende al menos un sensor (C1) orientado hacia esta superficie de rodadura (10), en el cual:
- se ilumina una sección (11) de la superficie de rodadura (10) situada enfrente del sensor (C1) con un emisor de ondas (20) de este sensor (C1);
- se captan las ondas reflejadas por la sección (11) con un receptor (30) del sensor (C1) que produce una señal (A) que tiene una amplitud dependiente de la intensidad de las ondas captadas;
y caracterizado por que comprende una operación de tratamiento de la señal (A) procedente del sensor, en el transcurso de la cual:
- se detecta la naturaleza de la superficie de rodadura (10) identificando transiciones entre una primera y una segunda naturaleza de superficie de rodadura por comparación de una media deslizante de varios valores de amplitudes de la señal procedente del receptor (30) en instantes sucesivos, con un umbral de transición;
- se elige entre al menos dos juegos de umbrales de detección predeterminados aquél correspondiente a la naturaleza de la superficie de rodadura detectada;
- se identifica un marcado sobre la superficie de rodadura cuando la señal (A) reflejada tiene una amplitud superior a un valor umbral predeterminado del juego de umbrales de detección elegido.
2. Procedimiento de vigilancia de acuerdo con la reivindicación 1, caracterizado por que la citada operación de detección y de elección realiza una elección entre al menos un primer juego de umbrales de detección de valores predeterminados, correspondiente a una superficie de rodadura (10) de asfalto, y un segundo juego de umbrales de detección de valores predeterminados diferentes, correspondiente a una superficie de rodadura (10) de hormigón.
3. Procedimiento de vigilancia de acuerdo con la reivindicación 2, caracterizado por que la operación de detección y de elección comprende una etapa de detección del estado seco o mojado de la superficie de rodadura (10) y porque el juego de umbrales es elegido entre cuatro juegos de umbrales correspondientes respectivamente a la primera naturaleza de superficie de rodadura seca, a la segunda naturaleza de superficie de rodadura seca, a la primera naturaleza de superficie de rodadura mojada, y a la segunda naturaleza de superficie de rodadura mojada.
4. Procedimiento de vigilancia de acuerdo con la reivindicación 2, caracterizado por que la citada operación de tratamiento de la señal (A) comprende una etapa de adquisición de los valores (Ak) de la amplitud de la señal (A) en instantes de adquisición (Tk) sucesivos separados por un período (T) constante, y una etapa de cálculo en cada instante de adquisición (Tk) de una media deslizante (Mn) de los n últimos valores adquiridos, y porque la citada operación de detección y de elección comprende una primera prueba efectuada en cada instante de adquisición (Tk), positiva si la media deslizante (Mn) es superior a un primer umbral de transición de valor predeterminado (UmbralHormigón), negativa si no, una etapa de solicitud de transición a hormigón si esta primera prueba es positiva en un instante de adquisición (Tk) y si en el mismo instante de adquisición (Tk) es utilizado el primer juego de umbrales de detección para la operación de tratamiento de la señal, y una etapa de solicitud de transición a asfalto si en un instante de adquisición (Tk) esta primera prueba es negativa y si en este mismo instante de adquisición (Tk) es utilizado el segundo juego de umbrales de detección para la operación de tratamiento de la señal.
5. Procedimiento de vigilancia de acuerdo con la reivindicación 4, caracterizado por que la operación de detección y de elección conduce a la elección del segundo juego de umbrales de detección correspondiente a una superficie de rodadura (10) de hormigón si en un instante de adquisición (Tk) se ha efectuado una solicitud de transición a hormigón y si la primera media deslizante (Mn) permanece continuamente superior al primer umbral de transición (UmbralHormigón) durante una primera duración predeterminada (Df) siguiente al citado instante de adquisición (Tk).
6. Procedimiento de vigilancia de acuerdo con las reivindicaciones 4 o 5, caracterizado por que la operación de detección y de elección conduce a la elección del primer juego de umbrales de detección correspondiente a una superficie de rodadura (10) de asfalto si en un instante de adquisición (Tk) se ha efectuado una solicitud de transición a asfalto y si la primera media deslizante (Mn) permanece continuamente inferior al primer umbral de transición (UmbralHormigón) durante una segunda duración predeterminada (Df') siguiente al citado instante de adquisición (Tk).
7. Procedimiento de vigilancia de acuerdo con la reivindicación 5 combinada con la reivindicación 6, caracterizado por que las primera y segunda duraciones predeterminadas (Df, Df') son al menos iguales a un segundo.
8. Procedimiento de vigilancia de acuerdo con una cualquiera de las reivindicaciones 4 a 7, caracterizado por que la operación de detección y de elección comprende una segunda prueba efectuada en cada instante de adquisición (Tk), positiva si la primera media deslizante (Mn) oscila alrededor del primer umbral de transición (UmbralHormigón) con una frecuencia superior a un segundo umbral de transición (FrecuenciaMáx), negativa si no, y que conduce a la elección del segundo juego de umbrales de detección correspondiente a una superficie de rodadura (10) de hormigón si esta segunda prueba es positiva.
9. Procedimiento de vigilancia de acuerdo con la reivindicación 3, caracterizado por que los citados primer y segundo juego de umbrales de detección están adaptados a superficies de rodadura (10) secas respectivamente de asfalto y de hormigón, y porque la operación de detección y de elección comprende una etapa de detección del estado de la superficie de rodadura, seca o húmeda, y una etapa de elección ya sea de estos primer y segundo juego de umbrales de detección o bien de un tercer y un cuarto juego de umbrales de detección de valores predeterminados adaptados para superficies de rodadura (10) húmedas respectivamente de asfalto y de hormigón.
10. Procedimiento de vigilancia de acuerdo con la reivindicación 9, caracterizado por que la operación de detección consiste en observar la frecuencia de barrido de los lavacristales delanteros del vehículo.
11. Procedimiento de vigilancia de acuerdo con una cualquiera de las reivindicaciones 4 a 10, caracterizado por que n es superior o igual a 48.
Patentes similares o relacionadas:
CARRIL PARA VEHÍCULOS PESADOS CON MEDIOS DE COMPROBACIÓN DE VEHÍCULO VACÍO, del 18 de Junio de 2020, de INFORMATICA EL CORTE INGLES, S.A.: 1. Carril para vehículos pesados con medios de comprobación de vehículo vacío, caracterizado porque está constituido a partir de un carril para paso de vehículos […]
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Dispositivo para controlar un relleno de separación, vehículo que comprende dicho dispositivo y método de control asociado, del 29 de Abril de 2020, de ALSTOM Transport Technologies: Un dispositivo para controlar un relleno de separación con el que se va a equipar una puerta de un vehículo ferroviario , dicho dispositivo de control comprende: […]
Procedimiento y sistema para evitar mal funcionamiento en llamadas, del 21 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento para evitar errores de operación en llamadas por un teléfono móvil, mediante el cual el procedimiento comprende las etapas de: detectar continuamente […]
Método y aparato para la formación de imágenes fantasma computacional, del 24 de Julio de 2019, de BAE SYSTEMS PLC: Un aparato de formación de imágenes fantasma computacional que comprende una primera fuente de radiación electromagnética y un sistema […]
Procedimiento de adquisición de las coordenadas de un punto de activación de un proyectil y control de disparo que implementa un tal procedimiento, del 20 de Diciembre de 2017, de NEXTER SYSTEMS: Procedimiento de adquisición de las coordenadas de un punto de activación (P) de un proyectil o de una ráfaga de proyectiles en trayectoria y […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]
Técnicas para posicionar un vehículo, del 8 de Noviembre de 2017, de KONECRANES GLOBAL CORPORATION: Un sistema para determinar una ubicación (x_v, y_v) de un vehículo en un entorno provisto de una pluralidad de puntos de referencia (11, 11') cuya […]