Medios de posicionamiento para producir señales luminosas para posicionar una herramienta robótica con relación a un pieza de trabajo; método de utilización de tales medios de posicionamiento.
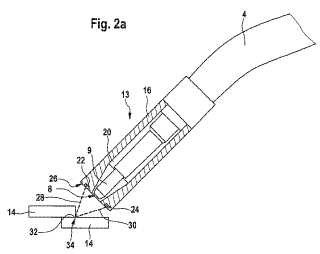
Un dispositivo de posicionamiento (13) para producir una señal luminosa (32) para posicionar una herramienta robótica (2) con relación a una pieza de trabajo (14),
que comprende:
un bastidor (16) que tiene extremos opuestos primero y segundo y un canal (20), pudiendo fijarse el primer extremo del bastidor (16) a un extremo de la herramienta robótica (2);
unos medios de iluminación (22, 24) para producir al menos un par de haces de luz (28, 30) que se proyectan hacia fuera del segundo extremo del bastidor (16);
los medios de iluminación (22, 24) comprenden al menos un par de fuentes de luz y están dispuestos para dirigir los haces de luz (28, 30) de dichas fuentes en direcciones convergentes de modo que los haces de luz (28, 30) se intersequen uno a otro y proporcionen una señal luminosa (32) a una distancia predeterminada del segundo extremo del bastidor (16), caracterizado porque los medios de iluminación comprenden al menos dos pares de fuentes de luz para generar al menos dos pares de haces de luz intersecantes (28, 30; 29, 31), en donde dichos dos pares de haces de luz intersecantes (28, 30; 29, 31) se intersecan sustancialmente en el mismo punto y en donde las fuentes de luz están posicionadas alrededor del canal (20) y montadas en o junto al segundo extremo del bastidor (16).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/003426.
Solicitante: Turner, Andrew.
Nacionalidad solicitante: Reino Unido.
Dirección: 2 Hopelands Heighington County Durham DL5 6PQ REINO UNIDO.
Inventor/es: TURNER,ANDREW.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23K9/127 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › B23K 9/00 Soldadura o corte por arco voltaico (soldadura eléctrica por escoria B23K 25/00; transformadores de soldadura H01F; generadores de soldadura H02K). › Medios para seguir líneas durante la soldadura o el corte por arco (copiado en general B23Q 35/00).
- B23K9/167 B23K 9/00 […] › y un electrodo no consumible.
- B23K9/29 B23K 9/00 […] › Dispositivos de soporte adaptados para servir de medios de protección.
- B23K9/32 B23K 9/00 […] › Accesorios (conexiones a tierra H01R).
- B23Q17/24 B23 […] › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 17/00 Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00). › utilizando medios ópticos.
- B25J19/02 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F). › Dispositivos sensibles.
PDF original: ES-2377421_T3.pdf
Fragmento de la descripción:
Medios de posicionamiento para producir señales luminosas para posicionar una herramienta robótica con relación a una pieza de trabajo; método de utilización de tales medios de posicionamiento.
Esta invención se refiere a unos medios de posicionamiento y a un método de uso de los mismos según el preámbulo de las reivindicaciones 1 y 17, respectivamente (véase, por ejemplo, el documento US 6 352 354) .
Aunque la descripción siguiente se refiere casi exclusivamente a unos medios de posicionamiento para uso en el posicionamiento de un soplete de soldadura robótico con relación a una costura de soldadura o una pieza de trabajo, se apreciará por los expertos en la materia que los medios de posicionamiento de la presente invención pueden utilizarse para posicionar cualquier objeto, pieza o superficie con relación a otro objeto, pieza o superficie en uso, tal como en Mig, Mag, Tig y/o corte con plasma y/o similares.
Los sopletes de soldadura róboticos se utilizan en un gran número de industrias diferentes para permitir una soldadura automatizada precisa entre al menos dos objetos, piezas o superficies. Un soplete de soldadura robótico típico incluye un miembro de brazo que tiene un primer extremo, que se fija sobre el extremo de una unidad robótica, y un segundo extremo libre. Un canal corre a través del miembro de brazo y un alambre de electrodo alargado está situado en el canal. Un extremo del alambre de electrodo sobresale una corta distancia del segundo extremo libre del miembro de brazo y un sistema de alimentación de alambre alimenta alambre a través del miembro de brazo a medida que se consume el alambre durante el proceso de soldadura. Una fuente de potencia suministra corriente eléctrica al alambre de soldadura durante el uso. Unos medios de refrigeración por aire o líquido pueden estar dispuestos en el soplete para refrigerar el aparato de soldadura. Un gas inerte adicional puede ser dispensado junto al segundo extremo libre para que actúe como escudo alrededor del sitio de soldadura a fin de impedir que éste se contamine cuando el charco de soldadura esté en un estado fundido. Una cubierta desmontable puede estar situada alrededor del segundo extremo libre junto a la boquilla dispensadora de gas para asegurar que el gas sea enfocado sobre el lugar de soldadura. El soplete de soldadura puede utilizarse como parte de un sistema de soldadura completamente automatizado o semiautomatizado.
Para unir piezas de soldadura una con otra, las piezas individuales tienen que ser alineadas con precisión y mantenidas con seguridad en su sitio durante el proceso de soldadura. Además, el soplete de soldadura robótico necesita ser alineado de forma precisa con las piezas que se están soldando a fin de proporcionar una soldadura exacta. Convencionalmente, la programación del soplete de soldadura robótico por un operador para emprender un proceso de soldadura implica que el operador mueva remotamente el soplete robótico a lo largo de una trayectoria de soldadura preferida. Una vez programado, el soplete de soldadura sigue entonces la trayectoria de soldadura ajustada por el operador. Si se ajusta una trayectoria de soldadura incorrecta por parte del operador, esto puede dar como resultado problemas asociados con el cordón de soldadura, la garganta de soldadura, la penetración de la soldadura, la posición de la soldadura y/o similares, lo cual puede traducirse en una separación del material de soldadura. Por tanto, es esencial que el operador sea capaz de posicionar con precisión el soplete de soldadura sobre la trayectoria de soldadura.
Sin embargo, un problema asociado con la soldadura es que es con frecuencia difícil que el operador vea el extremo libre del soplete de soldadura debido a las pobres condiciones de iluminación, obstrucciones y/o similares, produciéndose así una desalineación del soplete de soldadura con respecto a una trayectoria de soldadura preferida y una pobre calidad de la soldadura. El operador tiene que estar entrenado y disponer de un alto nivel de pericia para situar con precisión el soplete de soldadura sobre una trayectoria de soldadura correcta. Por tanto, el posicionamiento del soplete de soldadura en términos de distancia y ángulo del soplete con relación a la pieza de trabajo es a menudo susceptible de error humano y requiere que se acometa un costoso entrenamiento por parte del operador. Además, el alambre de soldadura que sobresale del extremo libre del miembro de brazo se dobla frecuentemente durante la programación del soplete de soldadura sobre la trayectoria de soldadura. Por tanto, el operador tiene que recortar frecuentemente el alambre de soldadura para obtener la longitud de proyección correcta. Esto consume tiempo del operador y aumenta el coste del proceso de soldadura. Además, el operador puede no darse cuenta de que el alambre está doblado y programar así la trayectoria de soldadura para un alambre doblado en vez de hacerlo para el alambre recto que será alimentado a través del segundo extremo libre durante la soldadura, creando así un programa de trayectoria de soldadura incorrecto y una pobre calidad de la soldadura.
Por tanto, un objeto de la presente invención consiste en proporcionar unos medios de posicionamiento que incrementen la facilidad y reduzcan el nivel de pericia requerido por un operador para posicionar con precisión un aparato asociado con los medios de posicionamiento. Es también un objeto de la presente invención proporcionar una calidad de soldadura mejorada.
Es otro objeto de la presente invención proporcionar unos medios de posicionamiento para uso en un soplete de soldadura robótico.
Es otro objeto más de la presente invención proporcionar un método de utilización de los medios de posicionamiento.
Según un primer aspecto de la presente invención, se proporcionan unos medios de posicionamiento conforme a la reivindicación 1.
Aunque se utiliza aquí el término "medios de iluminación", este término cubre también el uso de una fuente o fuentes de energía que sean capaces de emitir radiación electromagnética de una longitud de onda predeterminada y que puedan visualizarse directa o indirectamente con el ojo humano, tal como una radiación con una longitud de onda en la parte visible o la parte óptica del espectro (es decir, una longitud de onda aproximadamente entre 380-750 nm) . Por ejemplo, se considera frecuentemente que se emita un rayo láser desde una fuente de energía y que la luz proyectada se vea como una mancha o una pequeña proyección configurada sobre una superficie sobre la que se proyecta el haz durante el uso.
La distancia predeterminada en la que se intersecan los haces de luz corresponde típicamente a una posición correcta u operativa de los medios de posicionamiento respecto del primero y/o segundo objeto, superficie o pieza. Cuando se usan los medios de posicionamiento en un soplete de soldadura robótico, la posición correcta u operativa en cuyo punto se intersecan los haces de luz corresponde típicamente a una costura de soldadura entre piezas de soldadura primera y segunda.
Se pueden utilizar uso medios de lente u otros medios de enfoque para dirigir y/o enfocar los haces de luz o las proyecciones de luz en una dirección convergente. Los medios de lente o los medios de enfoque pueden disponerse en los medios de posicionamiento o asociarse con estos. Sin embargo, en una realización preferida se utilizan medios de iluminación, tal como, por ejemplo, un rayo láser, que emiten o proyectan luz de una longitud de onda estrecha sustancialmente bien definida para producir haces de luz sustancialmente paralelos desde una sola fuente de luz. En esta realización los medios de lente y/o los medios de enfoque pueden no ser requeridos. Esto contrasta típicamente con una fuente de luz incandescente que emite luz sobre un espectro más amplio de longitudes de onda para proporcionar haces de luz divergentes y en donde se requieren lentes y/u otros medios de enfoque para hacer que converja la luz en una dirección requerida.
Como alternativa y/o adicionalmente, los medios de iluminación pueden disponerse a una o más distancias de separación predeterminadas y/o bajo uno o más ángulos predeterminados uno con relación a otro a fin de crear los haces convergentes. Por ejemplo, si se utilizan rayos láser o proyecciones de láser, las fuentes de luz pueden ajustarse a un ángulo predeterminado para permitir que los haces o proyecciones de luz converjan uno hacia otro a fin de permitir la intersección de los haces o proyecciones a cierta distancia predefinida.
Si los haces de luz se intersecan... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo de posicionamiento (13) para producir una señal luminosa (32) para posicionar una herramienta robótica (2) con relación a una pieza de trabajo (14) , que comprende:
un bastidor (16) que tiene extremos opuestos primero y segundo y un canal (20) , pudiendo fijarse el primer extremo del bastidor (16) a un extremo de la herramienta robótica (2) ;
unos medios de iluminación (22, 24) para producir al menos un par de haces de luz (28, 30) que se proyectan hacia fuera del segundo extremo del bastidor (16) ;
los medios de iluminación (22, 24) comprenden al menos un par de fuentes de luz y están dispuestos para dirigir los haces de luz (28, 30) de dichas fuentes en direcciones convergentes de modo que los haces de luz (28, 30) se intersequen uno a otro y proporcionen una señal luminosa (32) a una distancia predeterminada del segundo extremo del bastidor (16) , caracterizado porque los medios de iluminación comprenden al menos dos pares de fuentes de luz para generar al menos dos pares de haces de luz intersecantes (28, 30; 29, 31) , en donde dichos dos pares de haces de luz intersecantes (28, 30; 29, 31) se intersecan sustancialmente en el mismo punto y en donde las fuentes de luz están posicionadas alrededor del canal (20) y montadas en o junto al segundo extremo del bastidor (16) .
2. El dispositivo de posicionamiento (13) según la reivindicación 1, caracterizado porque el dispositivo de posicionamiento (13) incluye medios para ajustar el ángulo o la distancia de las fuentes de luz (22, 24) a fin de ajustar el punto de intersección de los haces de luz (28, 30) .
3. El dispositivo de posicionamiento (13) según la reivindicación 1 ó 2 en combinación con una herramienta robótica (2) , caracterizado porque el bastidor (16) tiene la forma de una cubierta (12) y la herramienta robótica (2) tiene la forma de un soplete de soldadura robótico (2) que lleva una boquilla (9) , estando fijado el primer extremo de la cubierta (12) al soplete de soldadura (2) y recibiendo el segundo extremo de la cubierta (12) la boquilla (9) .
4. El dispositivo de posicionamiento (13) según la reivindicación 1 ó 2, caracterizado porque el par de fuentes de iluminación son un par de fuentes de luz de diodo láser.
5. El dispositivo de posicionamiento (13) según la reivindicación 1 ó 2, caracterizado porque están previstos unos medios de ajuste para ajustar la posición longitudinal del bastidor (16) y/o las fuentes de luz montadas en el bastidor
(16) con relación al extremo de la herramienta robótica (2) a fin de ajustar la distancia del punto de intersección de los haces de luz (28, 30; 29, 31) al extremo de la herramienta robótica.
6. El dispositivo de posicionamiento (13) según la reivindicación 1 ó 2 en combinación con una herramienta robótica (2) , caracterizado porque el bastidor (16) está montado de forma giratoria sobre el extremo de la herramienta robótica (2) .
7. El dispositivo de posicionamiento (13) según la reivindicación 5, caracterizado porque están previstos unos medios limitadores para limitar el movimiento longitudinal del bastidor (16) y/o las fuentes de luz montadas en el bastidor (16) con relación a la herramienta robótica (2) .
8. El dispositivo de posicionamiento (13) según la reivindicación 1 ó 2, caracterizado porque están previstos unos medios de fijación para fijar o sujetar de manera separable el bastidor (16) al soplete de soldadura (2) .
9. El dispositivo de posicionamiento (13) según la reivindicación 8, caracterizado porque los medios de fijación comprenden un racor de tornillo, un racor de bayoneta, un ajuste de fricción, uno o más tornillos, pernos, tirantes, pinzas, miembros interacoplables o similares.
10. El dispositivo de posicionamiento (13) según la reivindicación 1 ó 2, caracterizado porque las fuentes de luz están dispuestas en rebajos definidos en el segundo extremo del bastidor (16) .
11. El dispositivo de posicionamiento (13) según la reivindicación 1 ó 2, caracterizado porque unos medios de lente
o de aumento están asociados con las fuentes de luz para ajustar el tamaño y/o el ángulo de convergencia de los haces de luz (28, 30; 29, 31) producidos por dichas fuentes de luz.
12. El dispositivo de posicionamiento (13) según las reivindicación 1 ó 2, caracterizado porque cada par de haces de luz (28, 30; 29, 31) es proyectado sustancialmente a 90 grados con relación al otro par de haces de luz.
13. El dispositivo de posicionamiento (13) según la reivindicación 1 ó 2, caracterizado porque el bastidor (16) tiene una fuente de potencia en forma de al menos una batería recargable, y el bastidor (16) incluye unos medios de contacto eléctrico para permitir un acoplamiento con medios de contacto eléctrico complementarios dispuestos en una estación de acogida para permitir la recarga de dicha batería.
14. El dispositivo de posicionamiento (13) según la reivindicación 5, caracterizado porque los medios de ajuste
incluyen uno o más elementos espaciadores desmontables para colocación entre el primer extremo del bastidor (16) y la herramienta robótica.
15. El dispositivo de posicionamiento (13) según la reivindicación 1 ó 2, caracterizado porque cada haz de luz (28, 30; 29, 31) o un par de haces de luz son de un color diferente de modo que, cuando se solapen dichos haces de luz, se produzca una señal luminosa de otro color diferente.
16. El dispositivo de posicionamiento (13) según la reivindicación 1 ó 2, caracterizado porque están previstos unos medios adaptadores para acoplamiento entre el primer extremo del bastidor (16) y el extremo de la herramienta robótica (2) .
17. Un método de utilización de un dispositivo de posicionamiento (13) para producir una señal luminosa (32) para posicionar una herramienta robótica (2) con relación a una pieza de trabajo (14) , comprendiendo el dispositivo de posicionamiento (13) :
un bastidor (16) que tiene extremos opuestos primero y segundo y un canal (20) , pudiendo fijarse el primer extremo del bastidor (16) a un extremo de la herramienta robótica (2) ;
unos medios de iluminación (22, 24) para producir al menos un par de haces de luz (28, 30) que se proyectan hacia fuera del segundo extremo del bastidor (16) , comprendiendo los medios de iluminación (22, 24) al menos un par de fuentes de luz que proporcionan al menos un par de haces de luz (28, 30) ;
caracterizado porque el método incluye los pasos de:
dirigir dos pares de haces de luz (28, 30; 29, 31) en direcciones divergentes de modo que los haces de luz (28, 30; 29, 31) se intersequen uno a otro y proporcionen una señal luminosa (32) a una distancia predeterminada del segundo extremo del bastidor (16) , en donde dichos dos pares de haces de luz intersecantes (28, 30; 29, 31) se intersecan sustancialmente en el mismo punto y en donde las fuentes de luz se posicionan alrededor del canal (20) y se montan en o junto al segundo extremo del bastidor (16) .
18. Un método para posicionar una herramienta robótica (2) con relación a una plataforma (100) y determinar si una o más espigas de localización (200) están correctamente posicionadas en la plataforma (100) , utilizando un dispositivo de posicionamiento (13) según la reivindicación 1 y caracterizado por los pasos de:
mover la herramienta robótica (2) hasta una posición preprogramada para la espiga de localización (200) ;
proyectar los dos pares de haces de luz (28, 30; 29, 31) desde el dispositivo de posicionamiento (13) sobre la espiga de localización (200) ; y determinar si los haces de luz (28, 30; 29, 31) se proyectan sustancialmente por igual alrededor del centro (202) de la espiga de localización (200) en una posición correcta o si los haces de luz (28, 30; 29, 31) se proyectan de una manera decalada respecto del centro (202) de la espiga de localización (200) en una posición incorrecta.
19. El método según la reivindicación 18, caracterizado porque los dos pares de haces de luz (28, 30; 29, 31) se colocan a sustancialmente 90 grados uno con respecto a otro.
Patentes similares o relacionadas:
Dispositivo de mandril y método, del 18 de Marzo de 2020, de In-Situ Oilfield Services Limited: Un dispositivo de mandril que tiene al menos dos mandíbulas para agarrar un objeto (T), y un mecanismo de ajuste configurado para ajustar el centro rotacional […]
Dispositivo de biopsia con elemento de corte interior, del 15 de Enero de 2020, de SENORX, INC.: Sonda para un dispositivo de biopsia de tejido para acceder a y recoger una muestra de tejido de un sitio diana dentro de un paciente que comprende: […]
Método para mecanizado e inspección de piezas de trabajo, del 13 de Noviembre de 2019, de Agie Charmilles SA: Método para mecanizado de piezas de trabajo e inspección de una superficie de pieza de trabajo procesada en una máquina herramienta , comprendiendo el método […]
Módulo de mecanización, conjunto de accesorio para módulo de mecanización, y procedimiento de puesta en marcha de un módulo de mecanización, del 9 de Octubre de 2019, de Watch Out SA: Conjunto de accesorios para módulo de mecanización por arrancado de virutas, que comprende: por lo menos un portaherramientas provisto de una […]
Procedimiento y dispositivo para detectar y corregir una ubicación espacial de una pieza de trabajo sostenida en un dispositivo de posicionamiento, del 4 de Septiembre de 2019, de JENOPTIK AUTOMATISIERUNGSTECHNIK GMBH: Procedimiento para detectar y corregir una ubicación espacial de una pieza de trabajo no simétrica en rotación sostenida en un dispositivo de posicionamiento […]
Procedimiento y dispositivo de control para equipo de motor, del 7 de Agosto de 2019, de PELLENC: Dispositivo de control para un equipo de motor, que comprende al menos un sensor y una tarjeta electrónica de control del equipo en función de […]
Aparato para el remachado, del 7 de Agosto de 2019, de COMAU S.P.A.: Aparato para aplicar remaches en una parte (π) de una superficie plana de una pieza (P), en el que dicha parte (π) de la superficie plana define un eje operativo […]
Sistema robótico autónomo supervisado para inspección y procesamiento de superficie compleja, del 24 de Abril de 2019, de CARNEGIE MELLON UNIVERSITY: Un sistema para realizar procesamiento de superficie en un objeto tridimensional en un entorno de trabajo que comprende: una base estacionaria […]