Motocicleta con amortiguador de dirección electrónico de actuación mejorada.
(29/01/2020) Motocicleta que presenta una parte delantera (1A) y una parte trasera (1B), comprendiendo la parte delantera (1A) un manillar , un árbol del vástago del manillar y una rueda delantera , comprendiendo la parte trasera (1B) un bastidor de la motocicleta , una rueda trasera y un depósito , un amortiguador electrónico de dirección que comprende una primera parte firmemente unida al bastidor y una segunda parte firmemente unida a una parte del árbol del vástago del manillar tal como el manillar asociado con dicho árbol del vástago del manillar, controlándose dicho amortiguador de dirección electrónicamente por una unidad de control que controla la actuación del propio…
Bicicleta de pedaleo asistido y método para controlar la bicicleta de pedaleo asistido.
(26/10/2018) Bicicleta de pedaleo asistido comprendiendo:
una primera rueda (5') y una segunda rueda (5''),
al menos un freno mecánico aplicado a una de la primera rueda (5') y la segunda rueda (5'') y un mando de frenado para accionar dicho freno mecánico;
un conjunto de pedaleo desacoplado mecánicamente de dichas primera rueda (5') y segunda rueda (5''), mediante el que un usuario puede suministrar una energía de pedaleo (Wped),
un motor eléctrico acoplado mecánicamente al menos a una de dichas primera rueda (5') y segunda rueda (5'') que puede absorber una energía del motor (Wmot),
un dispositivo generador adaptado para generar una energía eléctrica de un dispositivo generador (Wgen) a partir de dicha energía de pedaleo (Wped), dispuesto en una relación de intercambio de energía con el conjunto…
Aparatos, sistema y procedimiento para detectar accidentes.
(08/04/2015) Procedimiento para detectar accidentes, caracterizado porque comprende las siguientes etapas operativas:
- obtención, por lo menos, de dos aceleraciones axiales (Ax, Ay, Az) que comprenden una primera aceleración axial (Ax) orientada a lo largo de un primer eje (x) y una segunda aceleración axial (Ay) orientada a lo largo de un segundo eje (y) que es sustancialmente perpendicular al primer eje (x);
- integrar, por lo menos, la primera aceleración axial (Ax) y la segunda aceleración axial (Ay) de dichas aceleraciones axiales (Ax, Ay, Az) para obtener, por lo menos, dos valores integrados (IAx, IAy) de la aceleración axial;
- cálculo de un módulo de energía (EM) según los dos valores integrados (IAx, IAy) de la aceleración axial;
- comparar el…
Sistema electrónico para el mantenimiento a distancia de una grúa.
(18/03/2015) Sistema electrónico para el mantenimiento a distancia de una grúa , comprendiendo el sistema:
- un ordenador configurado para:
• transmitir por una red de telecomunicaciones un primer mensaje de petición que lleva una orden distante para el mantenimiento de la grúa, estando el citado primer mensaje de petición sometido a un protocolo de radio-móvil de media/larga distancia;
- un dispositivo móvil configurado para:
• recibir de la red de telecomunicaciones el primer mensaje de petición y extraer del mismo la orden de mantenimiento a distancia;
• generar un segundo mensaje de petición que lleva la orden de mantenimiento a distancia, estando el citado segundo mensaje de petición sometido a…
Un sistema y procedimiento de estimación de estilo de conducción de vehículo automotor.
(26/03/2014) Un sistema de estimación de estilo de conducción de vehículo automotor , que comprende:
- un aparato de medición de una señal cinemática representativa de una tendencia de cantidad de movimiento de automotor (v(t)) a lo largo de un trayecto de medición;
caracterizado porque comprende además:
- un módulo de filtrado de paso bajo configurado para filtrar la señal cinemática y proveer una señal filtrada de referencia correspondiente, asociada a una tendencia de referencia de dicha cantidad (vF(t));
- un módulo de procesamiento que comprende:
un módulo de cálculo configurado para:
calcular , a partir de la señal cinemática y un modelo de descripción de…
Sistema y método para controlar la tracción en un vehículo de dos ruedas.
(20/03/2013) Método para el control de la tracción en un vehículo de dos ruedas que comprende un motor controlado porpar y una pluralidad de sensores para la medición instantánea de parámetros de conducción (v, j, q, w,x, a, RPM, marcha ) de dicho vehículo , comprendiendo el método las etapas de:
- determinación de un valor de referencia de deslizamiento (l0) como una función de un parámetro (q) representativode una solicitud de par de un usuario, dicho parámetro (q) representativo de una solicitud de par es detectadomediante dicha pluralidad de sensores ;
- estimación de un valor de deslizamiento instantáneo (lS);
- determinación de un primer componente (TCL) de una señal de par solicitada a dicho motor en base a ladiferencia entre dicho valor de referencia de…
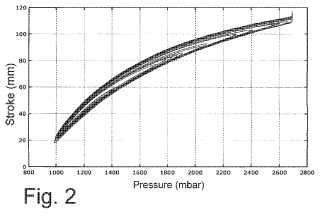
Procedimiento para estimar la carrera de la suspensión de un vehículo y aparato para la puesta en práctica de dicho procedimiento.
Sección de la CIP Técnicas industriales diversas y transportes
(05/09/2012). Ver ilustración. Solicitante/s: PIAGGIO & C. S.P.A.. Clasificación: B62K25/00, B60G17/018.
Procedimiento para estimar la carrera de la suspensión de un vehículo, que comprende las etapas que consistenen:
a) determinar una ley de variabilidad que asocia la carrera de la suspensión con la presión en el interior de unamortiguador de la misma, sobre la base de datos experimentales;
b) estimar el valor de la carrera de la suspensión relacionado con un valor de presión medida, sobre la base de laley de variabilidad identificada en la etapa a);
c) detectar/obtener la dinámica longitudinal del vehículo;
d) recalibrar la ley de variabilidad identificada en la etapa a), sobre la base de la dinámica longitudinal delvehículo detectada/obtenida en la etapa c).
PDF original: ES-2393140_T3.pdf
PROCEDIMIENTO Y APARATO PARA CONTROLAR UNA SUSPENSION SEMIACTIVA.
(26/10/2010) Procedimiento para controlar un generador de fuerza controlable en un sistema de suspensión controlable , estando interconectado dicho sistema de suspensión controlable entre un primer elemento y un segundo elemento , comprendiendo dicho procedimiento las etapas que consisten en:
{kind=link}