Robot autónomo de cubrimiento compacto.
(02/03/2016) Un robot autónomo de cubrimiento que comprende:
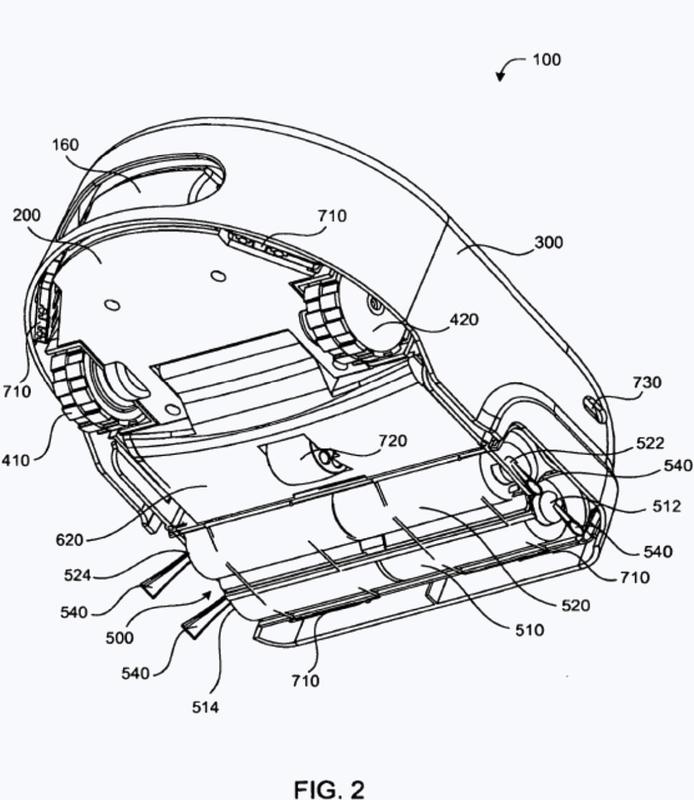
un chasis que tiene una parte delantera y una parte posterior , definiendo la parte delantera una forma sustancialmente rectangular y definiendo la parte posterior una forma arqueada;
un sistema de accionamiento portado por la parte posterior del chasis y configurado para maniobrar el robot sobre una superficie de limpieza, comprendiendo el sistema de accionamiento ruedas motrices derecha e izquierda accionadas de manera diferencial por motores correspondientes derecho e izquierdo ;
un controlador en comunicación con el sistema de accionamiento , donde el controlador está configurado para maniobrar el robot a fin de que pivote sobre sí mismo;
un conjunto de limpieza montado…
Robot autónomo de cubrimiento compacto.
Secciones de la CIP Física Necesidades corrientes de la vida
(10/02/2016). Ver ilustración. Inventor/es: MAMMEN,JEFFREY W, SCHNITTMAN,MARK, DUBROVSKY,ZIVTHAN A, SOLOCHEK,AARON. Clasificación: G05D1/02, A47L9/28, A47L9/00, A47L9/04.
Robot autónomo de cubrimiento que comprende:
un chasis que tiene partes delantera y posterior , definiendo la parte delantera una forma sustancialmente rectangular y definiendo la parte posterior una forma arqueada;
un sistema de accionamiento portado por el chasis configurado para maniobrar el robot sobre una superficie de limpieza;
ruedas motrices accionadas de manera diferencial derecha e izquierda ;
un conjunto de limpieza montado en la parte delantera del chasis ; y
un compartimento de basura dispuesto adyacente al conjunto de limpieza y configurado para recibir residuos agitados por el conjunto de limpieza ;
caracterizado por que el robot comprende además sensores antichoque dispuestos en las esquinas delanteras del chasis , con al menos un sensor antichoque dispuesto a cada lado de cada esquina, permitiendo así que el robot determine una dirección y / o una ubicación de una colisión.
PDF original: ES-2559128_T3.pdf
Robot Autónomo de Cubrimiento.
(01/10/2014) Un robot autónomo de cubrimiento comprende:
un sistema de tracción configurado para maniobrar el robot de acuerdo con una configuración de partida y una configuración de velocidad;
un sensor de parachoques sensible a una colisión del robot con un obstáculo en una dirección delantera; y caracterizado porque comprende adicionalmente
un sensor de proximidad sensible a un obstáculo potencial en la dirección delantera del robot;
en el que el sistema de tracción se configura para reducir la configuración de velocidad en respuesta a una señal desde el sensor de proximidad que indica la detección de un obstáculo potencial, mientras que continúa avanzando el robot de acuerdo con la configuración de partida; y
en el que el sistema de tracción…
Cobertura multimodo para un robot autónomo.
(06/08/2014) Un robot móvil , que comprende:
(a) medios para mover el robot sobre una superficie;
(b) un sensor de detección de obstáculos ;
(c) y un sistema de control conectado de manera operativa a dicho sensor de detección de obstáculos y a dichos medios de movimiento;
(d) estando configurado dicho sistema de control para hacer funcionar el robot en una pluralidad de modos, comprendiendo dicha pluralidad de modos: un modo de seguimiento de obstáculo mediante el cual dicho robot se desplaza de manera adyacente a un obstáculo, y un modo de rebote mediante el cual el robot se desplaza sustancialmente en una dirección alejándose de un obstáculo después de encontrarse un obstáculo,
caracterizado por que el robot móvil comprende además
sensores de desnivel que impiden que el robot móvil…
Robot autónomo de limpieza de superficies para una limpieza en seco y en mojado.
(13/11/2013) Un robot de tratamiento de superficies , que comprende:
un cuerpo de robot que tiene un perímetro exterior formado sustancialmente como una forma de ancho constante, accionado hacia delante mediante al menos un elemento de circulación;
un compartimento de material dispensado (S) que contiene el material que vaya a ser dispensado por el robot ;
un cabezal de limpieza en mojado que utiliza al menos un elemento de limpieza en mojado para limpiar a lo largo de una línea de ancho de limpieza del robot con la ayuda del material dispensado, definiendo el cabezal de limpieza en mojado un ancho de limpieza; y
un compartimento…
(19/09/2013) Un robot de amplia cobertura que comprende:
un chasis ;
múltiples conjuntos de rueda motriz (110a-b) dispuestos sobre el chasis ,
comprendiendo cada conjunto de rueda motriz:
una carcasa del conjunto de rueda motriz (324a-b);
una rueda (326a-b) acoplada giratoriamente a la carcasa (324a-b); y
un motor de accionamiento de rueda (328a-b) situado en la carcasa del conjunto de rueda motriz (324a-b) y quefunciona para accionar la rueda (326a-b); y
un conjunto de limpieza situado en el chasis comprendiendo el conjunto de limpieza:una carcasa del conjunto de limpieza ;
un cabezal de limpieza acoplado giratoriamente a la carcasa del conjunto de limpieza ; yun motor de accionamiento de limpieza situado en la carcasa…
(17/07/2013) Un robot de amplia cobertura que comprende:
un chasis unitario que define una pluralidad de receptáculos que reciben módulos teniendo cada uno un enchufe eléctrico del lado del receptáculo que funciona sin herramientas;un controlador configurado para proporcionar un control eléctrico independiente a cada enchufe eléctrico del lado del receptáculo que funciona sin herramientas; y
una cubierta inferior para la retención de la batería recibida dentro de un receptáculo ;
al menos uno de los receptáculos recibe un módulo de la rueda motriz (110a-b) fácilmenteextraíble del chasis como una unidad completa cuando ya no está asegurada por la cubierta inferior ,comprendiendo el módulo de la rueda motriz (110a-b):
una carcasa del módulo de rueda motriz (324a-b);
una rueda (326a-b)…
Robot autónomo de limpieza de superficies para una limpieza en seco y en mojado.
(02/04/2013) Un robot de tratamiento de superficies , que comprende:
un armazón de robot que tiene un perímetro externo formado sustancialmente como una forma de ancho constante,accionado hacia delante mediante al menos un miembro rotatorio;
un compartimento de fluido dispensado (S) que alberga un fluido para ser dispensado por el robot ;un cabezal de limpieza en mojado que emplea al menos un miembro de limpieza en mojado accionado paralimpiar un ancho de limpieza a lo largo de una linea de ancho de limpieza del robot con la ayuda de fluidodispensado; y
un compartimento de material residual (D) que alberga fluido residual recogido por el robot;
teniendo el cabezal de limpieza en mojado un ancho de limpieza con respecto a la masa total del robot delarmazon de robot , compartimento de material dispensado (S) una vez…
(07/06/2012) Un sistema de robot que comprende:
por lo menos un dispositivo periférico que se va a colocar en un ambiente y que comprende:
un suministro de energía ;
un componente de comunicación inalámbrica ; y
un controlador que tiene un modo activo en el que el dispositivo periférico es completamente operativo y un modo de hibernación en el que el dispositivo periférico es por lo menos parcialmente inactivo, el componente de comunicación inalámbrica es capaz de activación en el modo de hibernación ; y un robot móvil que comprende:
un sistema de impulsión que mueve el robot cerca al ambiente,
un componente de comunicación inalámbrica ; y
caracterizado porque el robot…
Movilidad de robot de cubrimiento.
(09/04/2012) Un robot autónomo comprende:
un chasis ; un sistema de tracción montado sobre el chasis y configurado para maniobrar el robot
un sensor de proximidad de piso ubicado en el chasis y configurado para detectar una superficie de piso adyacente, el sensor comprende:
un emisor de rayo configurado para dirigir un rayo hacia la superficie del piso; y un receptor de rayo sensible a una reflexión del rayo dirigido desde la superficie del piso y montado en un receptáculo dirigido hacia abajo del chasis ; y una cubierta transparente a los rayos que tiene un borde delantero y un borde posterior dispuesto a través de un extremo inferior del receptáculo…
PROCEDIMIENTO Y SISTEMA PARA UNA COBERTURA MULTIMODO PARA UN ROBOT AUTÓNOMO.
(24/10/2011) Un robot móvil, que comprende: (a) medios para desplazar el robot sobre una superficie; (b) un sensor de detección de obstáculos ; (c) y un sistema de control conectado de manera operativa a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento; (d) estando configurado dicho sistema de control para hacer funcionar el robot en una pluralidad de modos de funcionamiento y para realizar una selección entre la pluralidad de modos de funcionamiento durante el desplazamiento del robot al menos en parte como respuesta a señales generadas por el sensor de detección de obstáculos, comprendiendo dicha pluralidad de modos de funcionamiento: un modo de cobertura localizada mediante el cual el…
ROBOT AUTONOMO DE LIMPIEZA DE SUPERFICIES PARA UNA LIMPIEZA EN SECO Y EN MOJADO.
(14/10/2010) Un robot de limpieza autónomo , que comprende:
un armazón soportado para desplazarse sobre una superficie de limpieza, estando definido el armazón por un eje longitudinal y un eje transversal perpendicular ;
un primer aparato de recogida, acoplado al armazón y configurado para recoger partículas sueltas de la superficie de limpieza a través de un ancho de limpieza (W), estando dispuesto dicho ancho de limpieza (W) generalmente de manera paralela al eje transversal:
un aplicador de líquido , acoplado al armazón y configurado para aplicar un fluido de limpieza directamente sobre la superficie de limpieza; y en el que la disposición del primer aparato de recogida con respecto al aplicador de líquido hace que el primer aparato de recogida preceda al aplicador…
(04/03/2010) Un robot de amplia cobertura que comprende: un chasis ; múltiples conjuntos de rueda motriz (110a-b) dispuestos sobre el chasis , comprendiendo cada conjunto de rueda motriz: una carcasa del conjunto de rueda motriz (324a-b); una rueda (326a-b) acoplada giratoriamente a la carcasa (324a-b); y un motor de accionamiento de rueda (328a-b) situado en la carcasa del conjunto de rueda motriz (324ab) y que funciona para accionar la rueda (326a-b); y un conjunto de limpieza situado en el chasis comprendiendo el conjunto de limpieza: una carcasa del conjunto de limpieza ; un cabezal de limpieza acoplado giratoriamente a la carcasa del conjunto de limpieza ; y un motor de accionamiento de limpieza situado…
{kind=link}