CIP-2021 : G01S 13/72 : para el seguimiento en dos dimensiones, p. ej. combinación de seguimiento en ángulo y en distancia,
radar de detección y seguimiento automático "track-while-scan".
CIP-2021 › G › G01 › G01S › G01S 13/00 › G01S 13/72[2] › para el seguimiento en dos dimensiones, p. ej. combinación de seguimiento en ángulo y en distancia, radar de detección y seguimiento automático "track-while-scan".
Notas[n] desde G01S 13/00 hasta G01S 17/00: - Los grupos G01S 13/00 - G01S 17/00 cubren :
- los sistemas para detectar la presencia de un objeto, p. ej. por reflexión o por rerradiación desde el mismo objeto o desde un transpondedor asociado al objeto, para determinar la distancia o la velocidad relativa de un objeto, para proporcionar una representación coordenada de la distancia y de la dirección de un objeto o para obtener su imagen;
- los sistemas dispuestos para ser montados en una nave o vehículo móviles y que utilizan la reflexión de ondas en una superficie extensa externa a la nave, p. ej. sobre la superficie de la tierra, para determinar la velocidad y la dirección del movimiento de la nave con relación a la superficie.
- Los grupos G01S 13/00 - G01S 17/00 no cubren :
- los sistemas para determinar la dirección de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por los grupos G01S 1/00 o G01S 3/00;
- los sistemas para determinar la distancia o la velocidad de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por el grupo G01S 11/00 .
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada.
G01S 13/72 · · para el seguimiento en dos dimensiones, p. ej. combinación de seguimiento en ángulo y en distancia, radar de detección y seguimiento automático "track-while-scan".
CIP2021: Invenciones publicadas en esta sección.
Sistemas y métodos de seguimiento de objetos asociativos.
(08/01/2020). Solicitante/s: Isolynx, LLC. Inventor/es: DEANGELIS, DOUGLAS, J., REILLY,GERARD M, EVANSEN,EDWARD G.
Un aparato de seguimiento asociativo para seguir un primer objeto (402 , 1206) usando información de seguimiento para el primer objeto (402 , 1206) e información de seguimiento para un segundo objeto (402 , 1204), que comprende:
un monitor de fiabilidad de seguimiento (TRM) para determinar cuándo la información de seguimiento para el primer objeto (402 , 1206) no es fiable;
caracterizado por que además comprende:
un detector de proximidad para identificar el segundo objeto (402 , 1204) como más cercano al primer objeto (402 , 1206) cuando la información de seguimiento para el primer objeto (402 , 1206) no es fiable; y
un seguidor asociativo para asociar una localización del primer objeto (402 , 1206) con una localización del segundo objeto (402 , 1204) cuando la información de seguimiento del primer objeto (402 , 1206) no es fiable.
PDF original: ES-2783999_T3.pdf
Procedimiento de gestión de cruces en el seguimiento de objetos móviles y dispositivos asociado.
(01/01/2020) Procedimiento de gestión de cruces de pistas implementado por al menos un dispositivo de seguimiento de objetos móviles que comprende un grupo de al menos un sensor , consistiendo el seguimiento de objetos móviles en estimar un conjunto de pistas correspondientes a los diferentes objetos móviles percibidos por el grupo de al menos un sensor , correspondiendo cada pista a un conjunto de puntos sucesivos que traducen el movimiento de un mismo objeto móvil, estando dicho procedimiento caracterizado porque comprende para cada pista en un instante considerado, una etapa Etp1 de prueba, con el fin de determinar si la pista considerada es ambigua o no en el instante considerado, diciéndose que una pista k no es ambigua en el instante t|,…
Sistema satelital autónomo de evitación de desechos orbitales.
(15/05/2019) Un sistema satelital que puede evitar de forma autónoma una colisión con desechos orbitales , que incluye un satélite , en donde el satélite incluye:
un dispositivo de seguimiento de desechos orbitales adaptado para proporcionar datos de seguimiento sobre un fragmento de desecho;
un procesador de determinación de órbitas adaptado para recibir dichos datos de seguimiento de dicho dispositivo de seguimiento de desechos orbitales y calcular las órbitas de los desechos, para producir datos de elementos orbitales de los desechos y para calcular los elementos orbitales de los satélites a partir de sensores integrados o datos almacenados a bordo o ambos;
un procesador de efemérides adaptado para recibir dichos datos de elementos orbitales de los desechos y datos…
Sistema y método para detección por radar de un objeto.
(16/01/2019) Un sistema de radar para detección de uno o más objetos, comprendiendo dicho sistema:
un transmisor de ondas de radar para transmitir simultáneamente una señal de radar de CW y una señal de radar de FM-CW, primer, segundo y tercer receptor de ondas de radar para la recepción de señales de radar de CW y de FM-CW reflejadas desde uno o más objetos presentes en un alcance de detección del sistema de radar,
primer, segundo y tercer mezcladores de CW para mezcla de señales de transmisión de CW y señales de CW reflejadas recibidas por el primer, segundo y tercer receptores, respectivamente, para producir una o más de primera, segunda y tercera señales de batido de CW, refiriéndose cada primera, segunda y…
Procedimiento y dispositivo para el seguimiento de la trayectoria de un objeto en movimiento así como programa informático y soporte de datos.
(09/10/2018) Procedimiento para el seguimiento de la trayectoria de un objeto en movimiento con las siguientes etapas:
a) facilitación de datos de al menos una magnitud de estado a determinar, que influye en el movimiento, del objeto en movimiento en un primer instante;
b) inicialización de la densidad de probabilidad (p) de la al menos una magnitud de estado a determinar en el primer instante;
c) predicción de la densidad de probabilidad (p) de la al menos una magnitud de estado a determinar en un instante siguiente situado después del primer instante;
d) verificación de si los datos de medición están presentes, los cuales se pueden consultar…
Un método para rastrear de forma continua la ubicación de múltiples objetos.
(06/06/2018). Solicitante/s: Isolynx, LLC. Inventor/es: DEANGELIS, DOUGLAS, J., REILLY,GERARD M, EVANSEN,EDWARD G.
Un método para rastrear de forma continua la ubicación de múltiples objetos y que consta de los siguientes pasos:
determinar la probabilidad de transferencia del primer objeto a cualquiera de los múltiples objetos;
asociar el primer objeto con el más probable de los múltiples objetos; y
utilizar la ubicación actual (A) del objeto asociado como la ubicación del primer objeto.
PDF original: ES-2677094_T3.pdf
Procesamiento de datos multiobjetivo para radares pasivos multiestáticos y multicanales.
(22/11/2017) Procedimiento de rastreo para sistemas de radares pasivos multicanales, incluyendo dicho sistema un receptor que aprovecha las emisiones producidas por una pluralidad de emisores de oportunidad, constituyendo cada emisor con el receptor una base biestática, presentando la emisión producida por cada uno de los emisores un espectro constituido por diferentes canales de frecuencia cuyo procesamiento conduce en cada instante a la constitución de marcaciones, estando cada marcación caracterizada por un vector de tres componentes constituidos por una medida de distancia biestática, una medida de velocidad biestática y una medida de azimut, así como por la matriz diagonal 3x3 de los…
Un método de estimación de una densidad de trazado local en un sistema de radar; un estimador de la densidad de trazado y un sistema de radar con un estimador de la densidad de trazado.
(22/02/2017) Un método de estimación de la densidad de trazado local en un sistema de radar que observa un volumen de observación y configurado para generar trazados con atributos de trazado , comprendiendo el método :
- establecer un conjunto no vacío de funciones base M-dimensionales y coeficientes correspondientes en un espacio de medición M-dimensional, representando el conjunto no vacío de funciones base Mdimensionales y coeficientes correspondientes , una densidad de trazado local , en donde M es el número de atributos del trazado, representados los coeficientes correspondientes que corresponden a un número de…
Procedimiento para el funcionamiento de un sensor de radar en un automóvil, sensor de radar y automóvil.
(09/11/2016). Solicitante/s: AUDI AG. Inventor/es: KHLIFI,RACHID.
Procedimiento para el funcionamiento de un sensor de radar utilizado para la percepción del entorno para un automóvil , en el que para al menos un trayecto recorrido por el automóvil se calculan datos de referencia que describen características estáticas perceptibles a través del sensor de radar , teniendo en cuenta datos de radar registrados a lo largo del trayecto y se registran dentro del sensor de radar , caracterizado por que en el caso de un recorrido nuevo de al menos una sección de un trayecto, para el que se han registrado datos de referencia, se realiza con gasto reducido la evaluación de datos de radar registrado actualmente teniendo en cuenta los datos de referencia.
PDF original: ES-2651339_T3.pdf
Procedimiento y dispositivo de procesamiento de datos.
(10/08/2016) Procedimiento para aumentar la precisión de asociación de datos, que comprende las etapas de
• generar una primera entidad de datos de cinemática (KIN1) y una primera entidad de datos de identidad (ID1) referidas al menos a un objeto; y
• generar una segunda entidad de datos de cinemática (KIN2) y una segunda entidad de datos de identidad (ID2) referidas al menos a un objeto,
• generar al menos una matriz de distancias utilizando las entidades de datos de cinemática (KIN1, KIN2) o las entidades de datos de identidad (ID1, ID2); y
• filtrar la citada al menos una matriz de distancias generada;
caracterizado por
• generar la primera…
Planificación basada en urgencia.
(06/07/2016) Un procedimiento de planificación de tareas de radar, por ejemplo, búsqueda de vigilancia, seguimiento por radar o BITE, que se tienen que llevar a cabo en función de la disponibilidad del radar en un aparato de radar, que comprende las etapas de:
recibir una o varias tareas a planificar, teniendo una tarea un tiempo deseado de ejecución;
calcular una función de urgencia basada en el tiempo para antes del tiempo deseado para cada mencionada tarea, y una función de urgencia basada en el tiempo para después del tiempo deseado para cada mencionada tarea, donde cada función de urgencia tiene un tiempo deseado de finalización y es una función lineal con gradientes diferentes antes y después…
Sensores coordinados de vigilancia marítima.
(24/02/2016) Sistema de vigilancia marítima que comprende: i) al menos un Centro de Procesamiento y Control (PCC, 10), ii) al menos un racimo de Plataformas de Sensores Múltiples (MSPs, 30), comprendiendo cada MSP al menos dos sensores de un primer tipo y de un segundo tipo ; iii) un primer módulo de fusión de datos que está adaptado para tratar los datos procedentes de los sensores de uno de entre los primero y segundo tipos de dicho racimo; iv) un segundo módulo de fusión de datos que está adaptado para tratar la salida del primer módulo de fusión de datos con respecto a al menos dos sensores de una MSP, estando dicho sistema de vigilancia marítima caracterizado porque los al menos dos sensores están adaptados para proporcionar una distancia…
Procedimiento para advertir al conductor de un vehículo motorizado de la generación de una situación de peligro como consecuencia de una deriva no intencional a un carril de tránsito en sentido contrario.
(13/05/2015) Procedimiento para advertir al conductor de un vehículo motorizado de la generación de una situación de peligro como consecuencia de una deriva no intencional en sentido de o a un carril de tránsito en sentido contrario, caracterizado por que
- se determina un corredor virtual de circulación dirigido en el sentido de marcha del vehículo motorizado propio,
- usando en particular un sistema de captación, particularmente óptica, se determina una señalización horizontal de calzada que separa el carril propio del carril de tránsito en sentido contrario,
- se determina la posición relativa del vehículo propio respecto de la señalización horizontal de calzada,
- usando…
Procedimiento para la detección de la trayectoria de vuelo de proyectiles.
(01/04/2015) Procedimiento para la detección de la trayectoria de vuelo de proyectiles, en el que por medio de un radar Doppler a lo largo de la trayectoria de vuelo del proyectil se detecta una secuencia de N detecciones de objetivos en los instantes tn con n ≥ 1... 5 N y N ≥ 3, con las velocidades radiales medidas vrad(tn) y marcaciones azimutales α(tn) del proyectil y a partir de estas mediciones se calculan la trayectoria de vuelo y la dirección de movimiento del proyectil, caracterizado por que
- las mediciones vrad(tn) se adaptan en una primera adaptación no lineal de los parámetros a una relación analítica de la curva de tiempo de la velocidad radial vrad(t) del proyectil durante la transición de…
Procedimiento y disposición para la fusión de datos.
(04/03/2015) Procedimiento para fusionar datos procedentes de diferentes sensores de diferentes plataformas dentro de una única plataforma, que comprende las etapas de:
- la generación (s610) en una primera plataforma de una primera entidad de información, que comprende las etapas de:
- la asociación de un primer conjunto de datos generado por un primer sensor de dicha primera plataforma con un segundo conjunto de datos generado por un segundo sensor de dicha plataforma;
- la realización de un proceso de fusión de los conjuntos de datos asociados, y
- la generación de la primera entidad de información dependiendo del proceso de fusión realizado;
- la recepción de una segunda entidad de información relacionada con una segunda plataforma de cooperación;
-…
Procedimiento de tratamiento del seguimiento multi-sensor con reducido tiempo de latencia.
(25/02/2015) Procedimiento de tratamiento del seguimiento de objetivos aéreos que evolucionan en un espacio de interés detectados mediante una pluralidad de sensores , caracterizado porque:
• las detecciones procedentes de los sensores son sintetizados bajo la forma de detecciones de un único radar ficticio sincronizado para una pluralidad de sectores virtuales internos temporales de duración determinada,
• el procedimiento comprende una etapa previa que establece una rejilla bidimensional de un plano de proyección estereográfico del espacio de interés, estando dividida la rejilla bidimensional en una pluralidad de células de forma rectangular,
• el sistema de rastreo memoriza en una memoria tampón todas las detecciones realizadas durante al menos un sector virtual interno,
• una función de…
Mejoras en relación con el seguimiento de un objetivo.
(20/08/2014) Un método de seguimiento de un objetivo, cuyo método se aplica a una red descentralizada que comprende una pluralidad de nodos, comprendiendo cada nodo un sensor que tiene por función efectuar observaciones de objetivos, un medio de comunicación que tiene por función transmitir y recibir información de seguimiento y un medio de almacenamiento que tiene por función memorizar la información de seguimiento caracterizado por cuanto que: el método comprende, además, efectuar, en un nodo local, las etapas de: (i) proporcionar un conjunto de modelos de dinámica del objetivo;
(ii) proporcionar un conjunto de probabilidades de modelos iniciales,…
Sistema y método de multilateración.
(14/05/2014) Sistema de multilateración que comprende:
una pluralidad de estaciones receptoras para recibir señales desde una aeronave ; y un controlador para aplicar un proceso de multilateración a salidas de las estaciones receptoras, salidas que indican la recepción de la señal, para derivar una posición de la aeronave;
en el que:
el controlador:
determina un valor de la altura de la aeronave;
compara la altura determinada con valores umbral para determinar el proceso de multilateración que va a usarse;
si la altura está por debajo de un primer umbral (hmin) entonces se usa un proceso de multilateración en 2D;
si la altura está entre el primer umbral (hmin) y un segundo umbral (h3D) entonces se usa un proceso de multilateración asistido en 2D; y
realiza el proceso de multilateración seleccionado para…
Selección de forma de onda de seguimiento para radar multifunción.
(30/04/2014) Un método para seleccionar una forma de onda de seguimiento en un aparato de radar para seguir uno o más blancos, comprendiendo el método los pasos de:
i) para al menos una traza, utilizar una forma de onda de seguimiento dotada de una energía y una frecuencia de repetición de impulsos adecuadas para determinar una tasa de distancia de blanco y una intensidad de señal retornada para un blanco; caracterizado por que el método comprende además:
ii) determinar la frecuencia radiada de una forma de onda de seguimiento transmitida subsiguiente para la al menos una traza; y
iii) modificar la energía y la frecuencia de repetición de impulsos para uso en la forma de onda de seguimiento subsiguiente para la al menos una traza sobre la base de la…
Métodos y aparato para proporcionar estimación de altitud de blanco en un sistema de radar bidimensional.
(20/11/2013) Un método, incluyendo:
seguir un contacto usando un sensor en un sistema de radar bidimensional para determinar una posiciónrelativa y una velocidad relativa del contacto con respecto al sensor;
determinar un tiempo estimado al punto de aproximación más cercano, TCPA, para el contacto usando laposición relativa y la velocidad relativa;
determinar un punto de aproximación más cercano estimado, CPA, para el contacto a partir del TCPAestimado;
determinar una distancia de línea de visión transversal estimada en el CPA estimado en base al TCPA estimado ylos datos de seguimiento de posición relativa y velocidad relativa; y
estimar una altitud para el contacto a partir del punto de aproximación más cercano estimado, CPA, y la…
Procedimiento de compresión de datos, plataforma distribuida de imagen integrada única y red que utiliza dicha plataforma.
(20/11/2013) Un procedimiento de compresión de datos adaptado para distribuir datos de medición de sensores a través deuna red de plataformas, comprendiendo cada plataforma un sistema para seguir blancos a partir de datos demedición de sensores,
prediciendo cada sistema de seguimiento trayectorias (P) de blancos a partir de datos de mediciónadquiridos de al menos un sensor colocalizado, calculando cada sistema de seguimiento, además, unrecorrido corto (ST) a partir de cada trayectoria prevista, basándose el recorrido corto únicamente en losdatos de medición más recientes de la trayectoria y,
distribuyendo cada sistema de seguimiento recorridos cortos (ST) a otras plataformas a través de la red;comprendiendo dicho recorrido corto…
Procedimiento para el seguimiento de blancos de objetos.
(03/10/2012) Un procedimiento para el seguimiento de blancos de objetos situados en el suelo por medio de observaciones procedentes de un sensor, en el que a una región geográfica dentro de la cual está presente al menos un objeto se le asigna un número de estados determinado de antemano, en el que
- la región geográfica está representada por una cuadrícula rectangular, en la que cada cuadro se corresponde con un estado Si en un modelo Markov oculto (HMM);
- la probabilidad de transición entre los estados Si y Sj en el modelo se representa por una matriz de transición, en el que las probabilidades de transición aij están condicionadas por la distancia geográfica entre estados y por el terreno existente en los estados,
- la región geográfica se divide en subregiones las cuales se definen de…
Sistema para evitar colisiones.
(19/09/2012) Un método para evitar una colisión entre un vehículo anfitrión y un vehículo intruso que comprende los pasosde:
- detectar un vehículo intruso dentro de una región predeterminada en torno al 5 vehículo anfitrión y recoger datossobre la posición del vehículo intruso en función del tiempo;
- predecir una trayectoria proyectada del vehículo intruso usando una extrapolación cuadrática de los datosde posición del vehículo intruso;
- asignar una región de protección en torno al vehículo anfitrión;
- determinar si la trayectoria proyectada del vehículo intruso interceptará la región de protección del vehículoanfitrión y determinar con ello si habrá un conflicto, y,
- al determinarse que habrá un conflicto entre el vehículo anfitrión y el vehículo intruso, calcular una alteracióndel rumbo del vehículo anfitrión de modo…
Procedimiento de compresión de datos, plataforma de cuadro integrado único distribuido y red para su uso.
(15/08/2012) Un procedimiento de compresión de datos adaptado para la distribución de datos de medición de sensores através de una red de plataformas, comprendiendo cada una de las plataformas un sistema para el seguimiento deobjetivos a partir de las mediciones de sensores, comprendiendo cada uno de los sistemas de seguimiento:
- predicción de trayectorias (P) de objetivos a partir de los datos de mediciones adquiridas desde un sensorcolocado, y:
- cálculo de una trayectoria corta (ST) a partir de cada una de las trayectorias previstas, basándose latrayectoria corta solo en los datos de mediciones más recientes en la trayectoria, y:
- distribución de trayectorias…
SISTEMA DE RADAR PARA AVIONES.
(03/11/2009) Sistema de radar para un avión, para su utilización como mínimo para detectar otro objeto aéreo dentro de una zona que rodea el avión, en el que el sistema comprende como mínimo un subsistema dotado de: como mínimo un transmisor para transmitir una señal de exploración electromagnética; un conjunto de receptores , en fase, para recibir simultáneamente reflexiones de la señal de exploración transmitida y para generar señales de recepción cada una de las cuales representa una reflexión recibida de la señal de exploración; y una unidad de proceso de señales para procesar cada una de las señales de recepción para obtener información con respecto a un objeto aéreo detectado dentro de la zona que rodea el avión, de manera que…
(01/11/2004) LA INVENCION SE REFIERE A UN PROCEDIMIENTO PARA EL SEGUIMIENTO AUTOMATICO DE UN GRUPO QUE DETECTA LAS FORMACIONES DE OBJETIVO Y LAS PISTAS DE LOS GRUPOS CORRESPONDIENTES A CADA FORMACION. SE FORMAN UNAS SEUDO-OBSERVACIONES PARA REPRESENTAR LAS OBSERVACIONES AUSENTES EN CADA GRUPO DE PISTAS. LAS SEUDO-OBSERVACIONES ACTUALIZAN LOS ESTADOS DE LAS PISTAS DE LOS OBJETIVOS SIN DETECTAR. LAS ESTIMACIONES DE LA VALIDEZ DE LAS PISTAS ELIMINAN LAS PISTAS FALSAS RESULTANTES DE LAS SERIES DE SEUDO-OBSERVACIONES. UNA VELOCIDAD DE GRUPO MEDIA, APLICADA A CADA PISTA DEL GRUPO, AYUDA A MANTENER LA ESTABILIDAD DE LA VELOCIDAD. EL OPERADOR TIENE LA OPCION DE SUPRIMIR LA VISUALIZACION DE TODAS LAS PISTAS, EXCEPTO PARA LA CABECERA DE CADA GRUPO, PARA ELIMINAR…
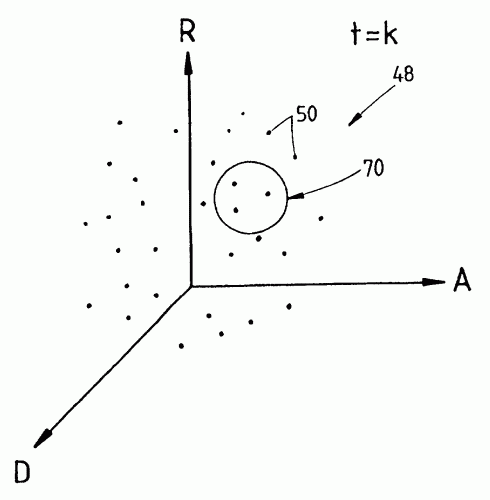
PROCEDIMIENTO DE SEGUIMIENTO PARA SISTEMA DE RADAR.
(01/12/2002). Ver ilustración. Solicitante/s: THE COMMONWEALTH OF AUSTRALIA. Inventor/es: PULFORD, GRAHAM, WILLIAM, JARROTT, ROBERT, KEITH, EVANS, ROBIN, JOHN.
LA INVENCION SE REFIERE A UN METODO DE RASTREO PARA UN SISTEMA DE ECO DE SEÑALES, QUE INCLUYE LA GENERACION DE VARIAS PUERTAS PARA MODOS DE PROPAGACION RESPECTIVOS SOBRE LA BASE DE UNA PREDICCION DE ESTADO OBJETIVO REFERENTE A UN TIEMPO DE PERMANENCIA, Y LA GENERACION DE UNA ESTIMACION DE ESTADO OBJETIVO REFERENTE AL TIEMPO DE PERMANENCIA SOBRE LA BASE DE LOS PUNTOS DE MEDICION DE OBJETIVO QUE QUEDAN DENTRO DE LAS PUERTAS.
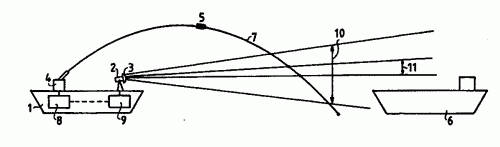
METODO PARA DETERMINAR EL PUNTO DE IMPACTO DE UN PROYECTIL DISPARADO CON RELACION A UN BLANCO.
(16/10/2001). Ver ilustración. Solicitante/s: HOLLANDSE SIGNAALAPPARATEN B.V.. Inventor/es: DEKKER, JACOB, EELKE.
ESTA INVENCION SE REFIERE A UN PROCEDIMIENTO DE DETERMINACION DE UN PUNTO DE IMPACTO DE UN PROYECTIL DISPARADO , CON RELACION A UNA SUPERFICIE O A UN OBJETIVO AEREO . SE DETERMINA ESTE PUNTO DE IMPACTO SEGUN UN PROCEDIMIENTO QUE CONSISTE EN PERSEGUIR EL OBJETIVO MEDIANTE UN PRIMER HAZ , AL MISMO TIEMPO QUE SE DIRIGE UN SEGUNDO HAZ , ENCIMA DE ESTE OBJETIVO , EN ESPERA A QUE EL PROYECTIL SE SITUE EN EL SEGUNDO HAZ , Y LUEGO EN PREDECIR EL PUNTO DE IMPACTO DEL PROYECTIL POR EXTRAPOLACION DE LOS DATOS DE MEDIDA DEL SEGUNDO HAZ.
PROCEDIMIENTO PARA EFECTUAR EL SEGUIMIENTO DE UN BLANCO MANIOBRABLE CON UN DETECTOR DE VELOCIDAD DE EXPLORACION LENTA.
(01/12/2000) CUANDO EL INTERVALO DE EXPLORACION O TIEMPO ENTRE DETECCIONES POTENCIALES SUCESIVAS ES LARGO CON RESPECTO A LA CAPACIDAD DE MANIOBRA DEL POTENCIAL OBJETIVO (DICHO EN EL ORDEN DE SEGUNDOS PARA UN SISTEMA DE RADAR), EXISTE LA POSIBILIDAD DE QUE EL OBJETIVO PUEDA SER CAPAZ DE DESVIARSE BASTANTE LEJOS MAS ALLA DE SU ULTIMA POSICION DETECTADA EN LA EXPLORACION I-1, QUE CORRELACIONA EL OBJETIVO CON UNA DETECCION EN LA EXPLORACION I, PUEDE NO SER POSIBLE USANDO METODOS DE SEGUIMIENTO CONVENCIONAL. LA PRESENTE INVENCION USA UNA PUERTA DE MANIOBRA PARA SUPERVISAR UN VOLUMEN EN EL ESPACIO. EL VOLUMEN ESTA LIMITADO POR ELIPSOIDES DE INTERSECCION Y ESTA DISPUESTO, PREFERIBLEMENTE, UNIFORMEMENTE ALREDEDOR DEL VECTOR DE VELOCIDAD ESTIMADA DEL ULTIMO OBJETIVO. LAS SUPERFICIES DEL ELIPSOIDE EL CUAL LIMITA EL VOLUMEN PUEDEN SER DETERMINADAS…
(01/11/1996). Solicitante/s: DAIMLER-BENZ AEROSPACE AKTIENGESELLSCHAFT. Inventor/es: SEELS, WERNER, DIPL.-MATH., ROBINSON, DAVID.
LA INVENCION SE REFIERE A UN FILTRO KALMAN, POR EJEMPLO PARA INSTALACIONES DE RADAR DE SEGUIMIENTO DE BLANCOS, EN EL QUE LAS COMPONENTES DE UN VECTOR DE MEDIDA SE PROCESAN INDEPENDIENTEMENTE ENTRE SI, CON LO QUE SE MODIFICA UNA TRAYECTORIA ANTERIOR. PARA EL PROCESAMIENTO DE LAS COMPONENTES SE UTILIZA UN SISTEMA DE COORDENADAS CARTESIANAS ESPECIFICO DE LOS SENSORES EN EL QUE UNO DE LOS EJES DE COORDENADAS COINCIDE CON LA DIRECCION DEL SENSOR AL BLANCO. EL FILTRO DE COMPONENTES SE CARACTERIZA POR SU FACILIDAD DE REALIZACION, SU UTILIZACION EN SISTEMAS MONOSENSORES Y MULTISENSORES ASI COMO POR UN COEFICIENTE DE CARGA ALTO.
{kind=link}
{kind=link}