Procedimiento de compresión de datos, plataforma distribuida de imagen integrada única y red que utiliza dicha plataforma.
Un procedimiento de compresión de datos adaptado para distribuir datos de medición de sensores a través deuna red de plataformas,
comprendiendo cada plataforma un sistema para seguir blancos a partir de datos demedición de sensores,
prediciendo cada sistema de seguimiento trayectorias (P) de blancos a partir de datos de mediciónadquiridos de al menos un sensor colocalizado, calculando cada sistema de seguimiento, además, unrecorrido corto (ST) a partir de cada trayectoria prevista, basándose el recorrido corto únicamente en losdatos de medición más recientes de la trayectoria y,
distribuyendo cada sistema de seguimiento recorridos cortos (ST) a otras plataformas a través de la red;comprendiendo dicho recorrido corto un vector y una matriz de covarianzas, caracterizado porque comprendeun cálculo de mediciones artificiales de cada recorrido corto, comprendiendo dicha medición artificialinformación de alcance, rumbo y épsilon.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04105200.
Solicitante: THALES NEDERLAND B.V..
Nacionalidad solicitante: Países Bajos.
Dirección: ZUIDELIJKE HAVENWEG 40 P.O. BOX 42 7550 GD HENGELO PAISES BAJOS.
Inventor/es: DE WAARD,HUUBTHALES INTELLECTUAL PROPERTY.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/72 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para el seguimiento en dos dimensiones, p. ej. combinación de seguimiento en ángulo y en distancia, radar de detección y seguimiento automático "track-while-scan".
- G01S13/87 G01S 13/00 […] › Combinaciones de sistemas de radar, p. ej. radar primario y radar secundario.
- G01S13/91 G01S 13/00 […] › para el control de tráfico (G01S 13/93 tiene prioridad).
- G08G5/00 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › Sistemas del control del tráfico aéreo.
PDF original: ES-2442852_T3.pdf
Fragmento de la descripción:
Procedimiento de compresión de datos, plataforma distribuida de imagen integrada única y red que utiliza dicha plataforma La presente invención versa acerca de un procedimiento, una plataforma y una red distribuida de imagen integrada única para seguir objetos en movimiento. Más en particular, la presente invención está adaptada para crear y mantener una imagen aérea integrada única (SIAP) por cada plataforma de la red distribuida.
Se da por sentado que hay disponible una red de plataformas distribuidas, cada una equipada con un nodo procesador y varios sensores colocalizados o no colocalizados. Cada una de las plataformas puede recibir información procedente de las demás plataformas. El objetivo de cada plataforma en el sistema distribuido es reconstruir una copia idéntica de la imagen aérea integrada única (SIAP) que contiene trayectorias compuestas estimadas, etiquetadas de forma única, de las diferentes aeronaves y los diferentes misiles que estén cruzando el espacio aéreo cubierto por los diferentes sensores. Una trayectoria compuesta contiene información de medición local e información recibida de otras plataformas.
Desde el fin de la Guerra Fría, las operaciones de salvaguarda de la paz se han convertido en la práctica internacional normal. Además, a la vez ha tenido lugar una enorme proliferación de la tecnología armamentística moderna. La consecuencia es que en las áreas de operaciones navales presentes y futuras se prevé que se despliegue un gran número de blancos furtivos. El resultado es que el tiempo de reacción disponible para una única plataforma de defensa aérea contra la amenaza se ha reducido significativamente, resultando en un espacio limitado de combate para enfrentarse a esos blancos. El documento US-A-4 855 932 da a conocer un seguidor autónomo tridimensional electroóptico. Para una fuerza militar, el espacio de combate puede, de hecho, aumentar por la distribución de toda la información basada en sensores disponible a cada miembro. El resultado es un sistema de fusión de datos de plataformas distribuidas en el que cada plataforma tiene una visión de conjunto completa del espacio de combate cubierto por todos los sensores disponibles.
Una posible solución es un enfoque en el que las diferentes plataformas lo intercambian todo sin filtrar, con mediciones asociadas a recorridos. Cada participante crea la misma imagen del entorno hostil.
Siguiendo este principio se ha desarrollado con fines militares la capacidad de enfrentamiento cooperativo. El sistema de capacidad de enfrentamiento cooperativo (CEC) se describe en “The Cooperative Engagement Capability”, John Hopkins APL Technical Digest, volumen 16, número 4 (1995) .
El sistema de capacidad de enfrentamiento cooperativo (CEC) es un sistema distribuido de defensa aeronaval en el que cada plataforma participante distribuye todas las mediciones de sensores no procesadas procedentes de los sistemas de sensores a bordo para proporcionar a cada plataforma la posibilidad de generar una copia idéntica de la imagen aérea integrada única (SIAP) .
Un inconveniente fundamental de esta solución es que cada plataforma tiene que procesar todos los datos disponibles. En términos de tiempo de CPU, el coste puede ser muy alto. Es posible que ocurran demoras muy grandes, con el resultado de que la imagen compilada esté demorada inaceptablemente en comparación con los desarrollos hostiles en el mundo real. Además, también existe el riesgo de que se supere el ancho de banda de los canales de comunicaciones disponibles, lo que significa que la transmisión de las mediciones puede retrasarse significativamente. Esto podría significar que no todas las plataformas de la fuerza de combate puedan recuperar a la vez las mediciones recogidas en cierto intervalo de tiempo, resultando en diferentes imágenes globales compiladas producidas por cada plataforma, que pueden mostrar grandes variaciones en la precisión, la continuidad y la coherencia de las etiquetas de los recorridos. Con ello se influye en la disponibilidad puntual de la imagen aérea integrada única (SIAP) .
En el sistema de capacidad de enfrentamiento cooperativo (CEC) , en el que todas las mediciones no procesadas son distribuidas y procesadas por cada plataforma, los problemas son los siguientes:
1. No hay ninguna garantía de que cada plataforma produzca y mantenga la misma copia de la imagen aérea integrada única (SIAP) .
2. En casos de pérdida de datos en la red, no es posible que se asignen las mismas etiquetas de trayectoria única a trayectorias correspondientes con la misma aeronave o el mismo misil.
3. La escalabilidad ascendente del sistema solo está limitada por el número de plataformas/sensores.
La presente invención resuelve los inconvenientes mencionados en lo que antecede comprimiendo en primer lugar los datos de una medición artificial y comprendiendo finalmente, además, una reducción dinámica.
Un objeto de esta invención es un procedimiento de compresión de datos adaptado para un sistema de seguimiento que comprende:
– la recepción de datos adquiridos localmente,
– la predicción de la trayectoria a partir de estos datos adquiridos localmente, 2
– el cálculo de recorridos cortos a partir de estas trayectorias previstas localmente, comprendiendo dicho recorrido corto un vector y una matriz de covarianzas,
– un cálculo de mediciones artificiales a partir de cada recorrido corto.
Otra realización de la presente invención es el procedimiento anterior de compresión de datos que comprende una reducción dinámica del cálculo y/o la distribución de recorridos cortos.
La reducción dinámica podría comprender una actualización de los recorridos cortos únicamente si la trayectoria prevista se desvía de un valor predeterminado a partir de una trayectoria local estimada o si la precisión de la trayectoria prevista se vuelve mayor que un umbral predeterminado de precisión.
Un objeto adicional de esta invención es una plataforma distribuida de imagen integrada única que comprende:
– al menos un sensor colocalizado,
– una unidad receptora para recibir de otras plataformas recorridos cortos, y
– al menos un nodo procesador que usa el procedimiento anterior de compresión de datos y que genera la imagen integrada única a partir de los recorridos cortos y las mediciones de sensores recibidos.
Además, otro objeto de esta invención es una red distribuida de imagen integrada única que comprende al menos dos de estas plataformas distribuidas de imagen integrada única.
Características y ventajas adicionales de la invención resultarán evidentes a partir de la siguiente descripción de ejemplos de realizaciones de la invención con referencia al dibujo, que muestra detalles esenciales a la invención, y a partir de las reivindicaciones. Los detalles individuales pueden realizarse en una realización de la invención, ya sea por separado o conjuntamente en cualquier combinación.
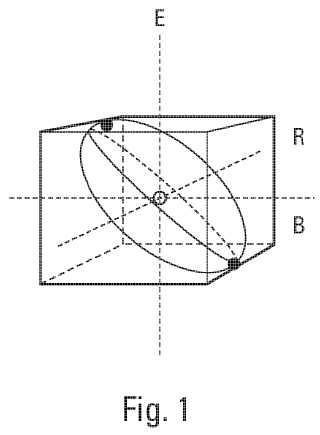
– La Figura 1 es una vista esquemática de la medición artificial del procedimiento de compresión de datos según la invención.
– La Figura 2 es una vista esquemática del procedimiento de compresión dinámica de datos según la invención.
En la solución propuesta según la invención, cada plataforma tiene un nodo procesador que puede recibir de otras plataforma mediciones o recorridos cortos. El recorrido corto es un recorrido para un objeto basado únicamente en las mediciones más recientes. Así, el recorrido corto concentra varias mediciones.
Un recorrido corto se calcula de tal modo que sus errores no se correlacionen mutuamente con los errores de cualesquiera otros datos del sistema para el mismo blanco. Así, cada recorrido corto es independiente de los otros recorridos cortos calculados, solucionando los problemas de correlación.
Además, los recorridos cortos pueden calcularse para que puedan procesarse como mediciones reales de sensores para producir una trayectoria, de modo que los recorridos cortos recibidos puedan usarse directamente para formar la trayectoria compuesta.
Los recorridos cortos ST pueden calcularse usando una tecnología de filtro de Kalman extendido. El procesamiento se basa entonces en un seguimiento de hipótesis múltiples según se describe en “A new concept for Task Force Data Fusion”, escrito por H. W. de Waard y W. Elgersma, publicado en las actas de Signal and Data Processing of Small Targets 2001.
Aunque en la transmisión de recorridos cortos la ocupación de ancho de banda y/o el cálculo global del sistema distribuido ya se reducen en comparación con la distribución... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de compresión de datos adaptado para distribuir datos de medición de sensores a través de una red de plataformas, comprendiendo cada plataforma un sistema para seguir blancos a partir de datos de medición de sensores,
prediciendo cada sistema de seguimiento trayectorias (P) de blancos a partir de datos de medición adquiridos de al menos un sensor colocalizado, calculando cada sistema de seguimiento, además, un recorrido corto (ST) a partir de cada trayectoria prevista, basándose el recorrido corto únicamente en los datos de medición más recientes de la trayectoria y, distribuyendo cada sistema de seguimiento recorridos cortos (ST) a otras plataformas a través de la red;
comprendiendo dicho recorrido corto un vector y una matriz de covarianzas, caracterizado porque comprende un cálculo de mediciones artificiales de cada recorrido corto, comprendiendo dicha medición artificial información de alcance, rumbo y épsilon.
2. El procedimiento de compresión de datos según la reivindicación 1, caracterizado porque el cálculo de mediciones artificiales comprende un cálculo de un posición tridimensional probable de un objeto y una aproximación del volumen definido por la matriz de covarianzas por una matriz de precisión de 3×3 correspondiente a una aproximación cúbica.
3. El procedimiento de compresión de datos según cualquiera de las reivindicaciones precedentes, caracterizado porque la representación geométrica de la matriz de covarianzas es un elipsoide cuyo mínimo y cuyo máximo son puntos de la superficie cúbica definida por la matriz de precisión de 3×3.
5. El procedimiento de compresión de datos según cualquiera de las reivindicaciones precedentes, caracterizado porque la reducción dinámica comprende una actualización de los recorridos cortos únicamente si la trayectoria prevista se desvía más de un valor predeterminado de una trayectoria local estimada.
7. El procedimiento de compresión de datos según cualquiera de las reivindicaciones precedentes, caracterizado porque la actualización comprende el cálculo de un recorrido corto a partir de la trayectoria prevista 30 localmente.
8. El procedimiento de compresión de datos según la reivindicación precedente, caracterizado porque la actualización comprende el cálculo de una medición artificial.
9. El procedimiento de compresión de datos según cualquiera de las reivindicaciones precedentes, caracterizado porque la actualización comprende la distribución del recorrido corto o la medición artificial.
10. Una plataforma distribuida de imagen integrada única que comprende:
! al menos un sensor colocalizado, ! una unidad receptora para recibir de otras plataformas recorridos cortos, y ! al menos un nodo procesador que usa el procedimiento de compresión de datos según cualquiera de las reivindicaciones precedentes y que genera la imagen integrada única a partir de los recorridos cortos y las 40 mediciones de sensores recibidos.
11. Una red distribuida de imagen integrada única que comprende al menos dos de las plataformas distribuidas de imagen integrada única según la reivindicación precedente.
Patentes similares o relacionadas:
 Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Procedimiento y dispositivo de identificación de un avión en conexión con el estacionamiento del avión en un puesto de estacionamiento, del 3 de Junio de 2020, de thyssenkrupp Airport Solutions, S.A: Procedimiento de identificación de un avión e indicación del tipo y versión del avión en conexión con el estacionamiento del avión en una puerta […]
Métodos y aparatos para sistema de transporte aéreo distribuido, del 27 de Mayo de 2020, de Sunlight Aerospace Inc: Un método para el transporte aéreo distribuido, que comprende: la provisión de un vehículo de transporte aéreo con un ala y una envergadura, con capacidad para transportar […]
SISTEMA Y METODO DE CONTROL OPERATIVO DE UNA AERONAVE NO TRIPULADA, del 26 de Marzo de 2020, de ARBOREA INTELLBIRD S.L: esumenesumen esumen Sistema y método para el control operativo de una aeronave no tripulada, cuyo fin es imposibilitar el despegue de la aeronave si no se ha pedido […]
Sistema y procedimiento para la gestión de la actividad de aviones mediante la utilización de analítica de vídeo, del 19 de Febrero de 2020, de Airbus Group India Private Limited: Procedimiento para la gestión de la actividad en la zona de operaciones mediante la utilización de analítica de vídeo , que comprende: […]
Un método y sistema implementados por ordenador para generar una trayectoria 3D a una ubicación de aterrizaje para un vehículo aéreo, del 1 de Enero de 2020, de THE BOEING COMPANY: Un sistema para generar una trayectoria 3D a partir de un origen a un destino para un vehículo aéreo (AV), el sistema comprende: - una unidad de gestión […]
Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado y un sistema para su aplicación, del 11 de Diciembre de 2019, de Aerobits Sp. z o.o: Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado, en un sistema, en el que una o más luces de advertencia están […]
Sistema de seguimiento para aeronaves no tripuladas, del 4 de Diciembre de 2019, de Airbus Defence and Space GmbH: Sistema para navegación de avión, que comprende: un primer avión con una primera unidad de comunicación que comprende un radar ; […]