Mejoras en relación con el seguimiento de un objetivo.
Un método de seguimiento de un objetivo, cuyo método se aplica a una red descentralizada que comprende una pluralidad de nodos,
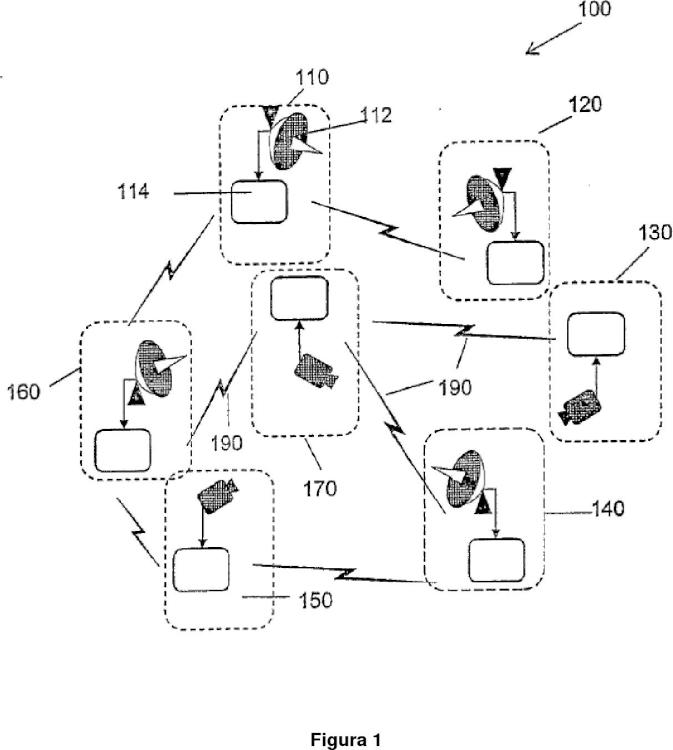
comprendiendo cada nodo (110, 120, 130, 140, 150, 160, 170) un sensor (112) que tiene por función efectuar observaciones de objetivos, un medio de comunicación (114) que tiene por función transmitir y recibir información de seguimiento y un medio de almacenamiento que tiene por función memorizar la información de seguimiento caracterizado por cuanto que: el método comprende, además, efectuar, en un nodo local, las etapas de: (i) proporcionar un conjunto de modelos de dinámica del objetivo;
(ii) proporcionar un conjunto de probabilidades de modelos iniciales, estando cada probabilidad de modelo inicial asociada con uno del conjunto de modelos de dinámica del objetivo y estando cada probabilidad de modelo inicial relacionada con la probabilidad de que la dinámica del objetivo esté conforme a su modelo de dinámica de objetivo asociado;
(iii) proporcionar un conjunto de estimaciones de estados de objetivos de modelos iniciales, estando cada estimación de estado del objetivo de modelo inicial asociado con uno del conjunto de modelos de dinámica del objetivo;
(iv) calcular un conjunto de estimaciones de estados de objetivos de modelos de previsión aplicando cada modelo de dinámica de objetivo a su estimación de estado del objetivo de modelo inicial asociada;
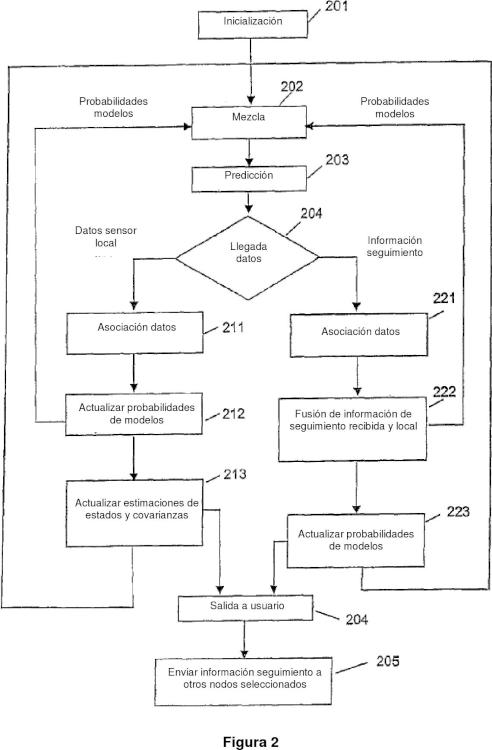
(v) en respuesta a una observación de objetivo efectuada en el nodo local, realizar un primer procedimiento de seguimiento (211, 212, 213) para actualizar así la información de seguimiento memorizada en el nodo local;
(vi) en respuesta a la recepción de la información de seguimiento en el nodo local procedente de un nodo distante, efectuar un segundo procedimiento de seguimiento del objetivo (221, 222, 223) actualizando así la información de seguimiento memorizada en el nodo local y
(vii) comunicar la información de seguimiento actualizada a otros nodos seleccionados (110, 120, 130, 140, 150, 160, 170) en la red (100);
y en donde el primer procedimiento de seguimiento comprende las etapas de:
(a) calcular las probabilidades de modelos actualizadas en función de una diferencia entre la observación del objetivo y la estimación de estado del objetivo de modelo de predicción;
(b) calcular las estimaciones de estados del objetivo de modelos actualizadas en función de la estimación de estados del objetivo de modelos de predicción y de la observación del objetivo; y
(c) calcular una estimación de estado del objetivo prevista compuesta combinando las estimaciones de estados de objetivos de modelos previstas utilizando una ponderación relacionada con las probabilidades de modelos actualizadas;
y el segundo procedimiento de seguimiento comprende la etapa de fusionar, de manera conservativa, la información de seguimiento recibida con la información de seguimiento memorizada en el nodo local con el fin de obtener información de seguimiento fusionada y en donde la información de seguimiento comprende una o más de la estimación de estados del objetivo compuesta actualizada, las estimaciones de estados de objetivos de modelos actualizadas y las probabilidades de modelos actualizadas.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2007/002093.
Solicitante: BAE SYSTEMS PLC.
Nacionalidad solicitante: Reino Unido.
Dirección: 6 CARLTON GARDENS LONDON SW1Y 5AD REINO UNIDO.
Inventor/es: NETTLETON,ERIC WILLIAM, LLOYD,CHRISTOPHER MARK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/72 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para el seguimiento en dos dimensiones, p. ej. combinación de seguimiento en ángulo y en distancia, radar de detección y seguimiento automático "track-while-scan".
PDF original: ES-2504520_T3.pdf
Fragmento de la descripción:
Mejoras en relación con el seguimiento de un objetivo Campo de la invención
La presente invención se refiere a un método para el seguimiento de un objetivo. Más en particular, la presente invención se refiere a dicho método aplicado a una red descentralizada que comprende una pluralidad de nodos. Cada nodo en la red tiene como función comunicarse con otros nodos seleccionados y efectuar observaciones del objetivo. La invención se refiere, además, a medios para efectuar dicho método.
Antecedentes de la invención
Varios métodos de seguimiento de objetivo conocidos se describen en la obra titulada Diseño y análisis de sistemas de seguimiento modernos por Samuel Blackman y Robert Popoli, publicada por Artech House (1999). Una clase particular de métodos de seguimiento utiliza algoritmos de modelos múltiples. Estos algoritmos de seguimiento avanzados son adecuados cuando la dinámica del objetivo puede variar entre varios regímenes de dinámica. A modo de ejemplo, el objetivo puede ser una aeronave que puede volar en línea recta o realizar maniobras con altas cargas G. Las técnicas de modelos múltiples permiten el seguimiento preciso de la aeronave cuando efectúa transiciones entre estos dos regímenes de dinámica y puede ampliarse para permitir cualquier número de regímenes de dinámica. Esencialmente, varios algoritmos de seguimiento, aplicando cada uno un modelo de dinámica diferente para el seguimiento del objetivo se hacen funcionar en paralelo y el resultado proporcionado por los algoritmos de modelos múltiples en una combinación de las predicciones de cada algoritmo de seguimiento. Una realización, a modo de ejemplo, conocida de un algoritmo de seguimiento de modelos múltiples es el algoritmo de modelos múltiples interactivos (IMM), descrito por Blackman y Popoli. El algoritmo IMM es un algoritmo de seguimiento de modelos múltiples particularmente eficiente.
El documento de Lang Rong et al titulado: Fusión multisensora de múltiples plataformas con comunicación de datos de tasa adaptativa, IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS, IEEE SERVICE CENTER, PISCATAWAY, NJ, ESTADOS UNIDOS. Vol. 33, n2 1, 1 de enero de 1997, páginas 274-281, XP112195, ISSN: 18-9251 da a conocer el uso de un seguimiento de IMM a través de sensores múltiples.
Con frecuencia es deseable efectuar el seguimiento de un objetivo utilizando varios sensores, de modo que el objetivo pueda ser objeto de seguimiento a través de un área más amplia o de modo que puedan utilizarse varios sensores de tipo diferente. Con el fin de conseguir un seguimiento óptimo en dichas situaciones, es necesaria la fusión de los datos procedentes de todos los sensores. Varias arquitecturas de red adecuadas para dicha fusión son conocidas en la técnica anterior. Estas arquitecturas pueden clasificarse como centralizada, distribuida o descentralizada.
La mayoría de los métodos de seguimiento se ponen en práctica utilizando una arquitectura centralizada o distribuida. Las arquitecturas centralizadas son aquellas en las que los datos, que son objeto de fusión, se envían a una instalación de procesamiento central para su fusión. La instalación central procesa todos los datos con el fin de obtener un resultado del seguimiento del objetivo. Las arquitecturas distribuidas difieren en cuanto que el proceso de fusión central puede colocar alguna carga de cálculo informático en las unidades distantes. Sin embargo, una instalación de procesamiento central debe existir también en el sistema para que se puedan combinar los resultados del procesamiento distribuido. Ambas arquitecturas centralizadas y distribuidas son, por lo tanto, vulnerables a la pérdida de la instalación de procesamiento central, puesto que dicha pérdida da lugar inevitablemente a un fallo operativo catastrófico del sistema completo. Además, ni las arquitecturas centralizadas ni las arquitecturas distribuidas son escalables, en primer lugar porque, a medida que crece la magnitud de la red, la carga de cálculo informático colocada sobre la instalación de procesamiento central aumenta con rapidez y en segundo lugar, porque la cantidad de datos que deben comunicarse a y desde la instalación de procesamiento central aumenta rápidamente con la magnitud de la red. La magnitud de la red está, de este modo, limitada por el ancho de banda disponible para la comunicación y la capacidad de cálculo de la instalación de procesamiento central.
Arquitecturas descentralizadas son conocidas, a modo de ejemplo, a partir del documento titulado Fusión de datos en redes de detección descentralizadas por Hugh Durrant-Whyte y Mike Sterns, publicado en el Proceedings de la 4a Conferencia Internacional sobre fusión de información, Canadá 21. No existe ninguna instalación de procesamiento central en una red descentralizada. Cada nodo es capaz de formar una estimación global basada en las observaciones de sensores locales y la información que se le comunica mediante otros nodos seleccionados en la red. En condiciones normales, estos otros nodos serán adyacentes o próximos a los nodos cercanos. A diferencia de las arquitecturas centralizadas y distribuidas, ningún componente de detección, procesamiento o comunicación es crítico para la operación de una red que tenga una arquitectura descentralizada. De este modo, el fallo operativo de cualquier elemento único da lugar solamente a una disminución incremental en el rendimiento, y no a un fallo catastrófico del sistema como sucedería en una red que tenga una arquitectura distribuida o centralizada. Además, ningún nodo requiere el conocimiento de la topología de red global y por lo tanto, el sistema puede escalarse simplemente conectando nuevos nodos sensores al sistema. A diferencia de los sistemas distribuidos y
centralizados, los requisitos de ancho de banda y de cálculo informático no aumentan con la magnitud creciente de la red. La comunicación se gestiona sobre una base de nodo a nodo, en lugar de requerir uno o más nodos para la difusión a través de la red.
Una red descentralizada está caracterizada por no ser una instalación de procesamiento central, no existiendo ningún requerimiento para cualquier nodo en la red de tener conocimiento de la topología de red completa (los nodos necesitan solamente tener conocimiento sobre los otros nodos seleccionados) y no existiendo ningún requerimiento para una instalación de comunicación común. Estas características aseguran que las arquitecturas descentralizadas sean más operativamente sólidas, más escalables y más modulares que los sistemas centralizados o distribuidos.
El documento de Ridley M et al titulado Seguimiento de objetivo desde el suelo descentralizado con otros nodos sensores heterogéneos en UAVs múltiples - INFORMATION PROCESSING IN SENSOR NETWORKS, SECOND INTERNATIONAL WORKSHOP, IPSN 23. PROCEEDINGS (LECTURE NOTES IN COMPUTER SERVICE VOL. 2634) SPRINGER-VERLAG BERLIN, ALEMANIA, 23, páginas 545-565, XP247864 ISBN: 3-54-2111-6 - presenta resultados en tiempo real de un sistema de fusión de datos aéreo descentralizado que efectúa el seguimiento de objetivos múltiples con base en el suelo. Estas estimaciones de objetivos se utilizan luego para elaborar un mapa del entorno. Se utiliza una estrategia de comunicación de descentralización que es operativamente sólida para las latencias de comunicaciones y los abandonos operativos y da lugar a que cada nodo sensor tenga una estimación local que utiliza información global.
Lamentablemente, los sistemas de seguimiento descentralizados, hasta la fecha, solamente han sido capaces de poner en práctica algoritmos de seguimiento simples. Dichos sistemas son, por lo tanto, incapaces de un seguimiento eficiente de objetivos que ejecutan maniobras complejas. Las arquitecturas de redes distribuidas que ponen en práctica algoritmos de IMM son conocidas, a modo de ejemplo, a partir del informe titulado Algoritmos de IMM centralizados y descentralizados para fusión de seguimiento de sensores múltiples por T. Ito y M. Faroq, publicada en los Proceedings of The Workshop sobre estimación, seguimiento y fusión: un tributo a Taakob Bar - Shalom, Monterrey, California, 21 que, de hecho, no da a conocer un algoritmo IMM que esté descentralizado en el sentido de la solución de patente presente, sino un algoritmo IMM distribuido que tiene un proceso centralizado para estimaciones de fusión procedente de nodos sensores distantes. Cada nodo realiza un procedimiento IMM sobre solamente datos generados a nivel local y una unidad de fusión central combina estas estimaciones resultantes. Cada nodo realiza un procedimiento de IMM sobre solamente datos generados a nivel local y una unidad de fusión central combina estas estimaciones resultantes. Dicho proceso no está descentralizado en el sentido de... [Seguir leyendo]
Reivindicaciones:
1. Un método de seguimiento de un objetivo, cuyo método se aplica a una red descentralizada que comprende una pluralidad de nodos, comprendiendo cada nodo (11, 12, 13, 14, 15, 16, 17) un sensor (112) que tiene por función efectuar observaciones de objetivos, un medio de comunicación (114) que tiene por función transmitir y recibir información de seguimiento y un medio de almacenamiento que tiene por función memorizar la información de seguimiento caracterizado por cuanto que: el método comprende, además, efectuar, en un nodo local, las etapas de:
(i) proporcionar un conjunto de modelos de dinámica del objetivo;
(ii) proporcionar un conjunto de probabilidades de modelos iniciales, estando cada probabilidad de modelo inicial asociada con uno del conjunto de modelos de dinámica del objetivo y estando cada probabilidad de modelo inicial relacionada con la probabilidad de que la dinámica del objetivo esté conforme a su modelo de dinámica de objetivo asociado;
(iii) proporcionar un conjunto de estimaciones de estados de objetivos de modelos iniciales, estando cada estimación de estado del objetivo de modelo inicial asociado con uno del conjunto de modelos de dinámica del objetivo;
(iv) calcular un conjunto de estimaciones de estados de objetivos de modelos de previsión aplicando cada modelo de dinámica de objetivo a su estimación de estado del objetivo de modelo inicial asociada;
(v) en respuesta a una observación de objetivo efectuada en el nodo local, realizar un primer procedimiento de seguimiento (211,212, 213) para actualizar así la información de seguimiento memorizada en el nodo local;
(vi) en respuesta a la recepción de la información de seguimiento en el nodo local procedente de un nodo distante, efectuar un segundo procedimiento de seguimiento del objetivo (221, 222, 223) actualizando así la información de seguimiento memorizada en el nodo local y
(vii) comunicar la información de seguimiento actualizada a otros nodos seleccionados (11, 12, 13, 14, 15, 16, 17) en la red (1);
y en donde el primer procedimiento de seguimiento comprende las etapas de:
(a) calcular las probabilidades de modelos actualizadas en función de una diferencia entre la observación del objetivo y la estimación de estado del objetivo de modelo de predicción;
(b) calcular las estimaciones de estados del objetivo de modelos actualizadas en función de la estimación de estados del objetivo de modelos de predicción y de la observación del objetivo; y
(c) calcular una estimación de estado del objetivo prevista compuesta combinando las estimaciones de estados de objetivos de modelos previstas utilizando una ponderación relacionada con las probabilidades de modelos actualizadas;
y el segundo procedimiento de seguimiento comprende la etapa de fusionar, de manera conservativa, la información de seguimiento recibida con la información de seguimiento memorizada en el nodo local con el fin de obtener información de seguimiento fusionada y en donde la información de seguimiento comprende una o más de: la estimación de estados del objetivo compuesta actualizada, las estimaciones de estados de objetivos de modelos actualizadas y las probabilidades de modelos actualizadas.
2. Un método según la reivindicación 1, que comprende, además, las etapas de repetir las etapas (i) a (vii) según se definen en la reivindicación 1, en cada nodo (11,12, 13, 14, 15, 15
, 17) en la red (1) y luego, efectuar una iteración de las etapas (iv) a (vii) según la reivindicación 1, en cada nodo (11, 12, 13, 14, 15, 16, 17) en la red (1) utilizando, en lugar de las probabilidades de modelos iniciales y de las estimaciones de estados de objetivos de modelos iniciales, las probabilidades de modelos actualizadas y las estimaciones de estados de objetivos de modelos actualizadas procedentes de la iteración inmediatamente precedente.
3. Un método según la reivindicación 1 o la reivindicación 2, que comprende, además, la etapa de mezclar la estimación de estados del objetivo del modelo inicial combinando, con una primera estimación de estado del objetivo de modelo inicial, una proporción de cada una de las otras estimaciones de estados de objetivos de modelos iniciales, estando dicha proporción relacionada con la probabilidad de que, durante la iteración inmediatamente precedente, la dinámica del objetivo que ha efectuado una transición desde un estado conforme al modelo de dinámica del objetivo asociada con dicha otra estimación de estado del objetivo de modelo inicial, a un estado conforme al modelo de dinámica del objetivo asociada con la primera estimación de estado del objetivo de modelo inicial y repetir el proceso de combinación para cada estimación de estado del objetivo de modelo inicial.
4. Un método según cualquiera de las reivindicaciones 1 a 3, en donde el primer procedimiento de seguimiento comprende, además, la etapa de asociar la observación del objetivo con la información de seguimiento memorizada en el nodo local.
5. Un método según cualquiera de las reivindicaciones 1 a 4, en donde el segundo procedimiento de seguimiento comprende, además, la etapa de asociar la información de seguimiento recibida con la información de seguimiento memorizada en el nodo local.
6. Un método según cualquiera de las reivindicaciones precedentes en donde la etapa de fusionar, de forma conservativa, la información de seguimiento recibida con la información de seguimiento memorizada en el nodo local comprende la aplicación de un algoritmo de intersección de covarianzas.
7. Un método según cualquiera de las reivindicaciones precedentes, en donde la información de seguimiento comprende la estimación de estados del objetivo compuesta actualizada.
8. Un método según la reivindicación 7, en donde la pluralidad de nodos (11, 12, 13, 14, 15, 16, 17) comprende al menos un primer nodo y un segundo nodo y en donde el conjunto de modelos de dinámica del objetivo proporcionado en el primer nodo es diferente al conjunto de modelos de dinámica del objetivo proporcionado en el segundo nodo.
9. Un método según cualquiera de las reivindicaciones 1 a 6, en donde la información de seguimiento comprende las estimaciones de estados de objetivos de modelos actualizadas y las probabilidades de modelos actualizadas.
1. Un método según la reivindicación 9, en donde el mismo conjunto de modelos de dinámica del objetivo se proporciona a cada nodo (11,12, 13, 14, 15, 16, 17) en la red (1).
11. Un método según cualquiera de las reivindicaciones precedentes, en donde el segundo procedimiento de seguimiento comprende la etapa de actualizar las probabilidades de modelos iniciales mediante la aplicación de una red Bayesiana.
12. Un método según la reivindicación 1, en donde el segundo procedimiento de seguimiento comprende fusionar, de forma conservativa, cada estimación de estado del objetivo del modelo actualizada recibida con su correspondiente estimación de estado del objetivo del modelo local correspondiente y fusionar, de forma conservativa, cada probabilidad del modelo actualizada recibida con su probabilidad local correspondiente.
13. Un método según cualquiera de las reivindicaciones precedentes, en donde las etapas (i) a (vii), según se define en la reivindicación 1, se realizan en cada nodo en la red.
14. Un método según la reivindicación 13, en donde el algoritmo de seguimiento de modelos múltiples es un algoritmo interactivo de seguimiento de modelos múltiples.
15. Una red de nodos descentralizada adaptada para realizar un método según cualquiera de las reivindicaciones 1 a 14.
16. Un programa informático que, cuando se ejecuta, tiene por función efectuar un método según cualquiera de las reivindicaciones 1 a 14.
Patentes similares o relacionadas:
Sistemas y métodos de seguimiento de objetos asociativos, del 8 de Enero de 2020, de Isolynx, LLC: Un aparato de seguimiento asociativo para seguir un primer objeto (402 , 1206) usando información de seguimiento para el primer objeto (402 , 1206) e información […]
Procedimiento de gestión de cruces en el seguimiento de objetos móviles y dispositivos asociado, del 1 de Enero de 2020, de THALES: Procedimiento de gestión de cruces de pistas implementado por al menos un dispositivo de seguimiento de objetos móviles que comprende un grupo de al menos un sensor , […]
Sistema satelital autónomo de evitación de desechos orbitales, del 15 de Mayo de 2019, de Briskman, Robert: Un sistema satelital que puede evitar de forma autónoma una colisión con desechos orbitales , que incluye un satélite , […]
Sistema y método para detección por radar de un objeto, del 16 de Enero de 2019, de Weibel Scientific A/S: Un sistema de radar para detección de uno o más objetos, comprendiendo dicho sistema: un transmisor de ondas de radar para transmitir simultáneamente […]
Procedimiento y dispositivo para el seguimiento de la trayectoria de un objeto en movimiento así como programa informático y soporte de datos, del 9 de Octubre de 2018, de MBDA Deutschland GmbH: Procedimiento para el seguimiento de la trayectoria de un objeto en movimiento con las siguientes etapas: a) facilitación de datos de al menos una […]
Un método para rastrear de forma continua la ubicación de múltiples objetos, del 6 de Junio de 2018, de Isolynx, LLC: Un método para rastrear de forma continua la ubicación de múltiples objetos y que consta de los siguientes pasos: determinar la probabilidad de transferencia […]
Procesamiento de datos multiobjetivo para radares pasivos multiestáticos y multicanales, del 22 de Noviembre de 2017, de THALES: Procedimiento de rastreo para sistemas de radares pasivos multicanales, incluyendo dicho sistema un receptor que aprovecha las emisiones producidas por una pluralidad […]
Un método de estimación de una densidad de trazado local en un sistema de radar; un estimador de la densidad de trazado y un sistema de radar con un estimador de la densidad de trazado, del 22 de Febrero de 2017, de Terma A/S: Un método de estimación de la densidad de trazado local en un sistema de radar que observa un volumen de observación y configurado para generar […]