CIP-2021 : A61F 2/68 : Medios de accionamiento o de control.
CIP-2021 › A › A61 › A61F › A61F 2/00 › A61F 2/68[2] › Medios de accionamiento o de control.
Notas[t] desde A61 hasta A63: SALUD; SALVAMENTO; DIVERSIONES
Notas[g] desde A61F 2/00 hasta A61F 4/00: Filtros; Dispositivos implantables en los vasos sanguíneos; Prótesis; Accesorios
A NECESIDADES CORRIENTES DE LA VIDA.
A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE.
A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C).
A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00).
A61F 2/68 · · Medios de accionamiento o de control.
CIP2021: Invenciones publicadas en esta sección.
Dispositivo de cierre con un equipo de ajuste para el giro automático de un elemento de unión de una pieza de cierre hacia una posición de cierre.
(13/05/2020) Dispositivo de cierre, con al menos una primera y una segunda pieza de cierre , que pueden unirse entre sí para cerrar el dispositivo de cierre (V), y pueden separarse la una de la otra, para abrir el dispositivo de cierre (V), en donde
- la segunda pieza de cierre para cerrar el dispositivo de cierre (V) puede colocarse a lo largo de un eje de unión (A) en una dirección de cierre (S) en la primera pieza de cierre ,
- el dispositivo de cierre (V) presenta al menos dos elementos de imán (M1, M2; M3, M4), que en la colocación de las piezas de cierre actúan atrayéndose magnéticamente entre sí entre la primera pieza de cierre y la segunda pieza de cierre , y
- la primera pieza de cierre presenta un primer elemento…
Rodilla protésica transfemoral semiaccionada.
(03/04/2019) Un dispositivo de rodilla protésica semiaccionada , configurado para acoplarse a una extremidad inferior que queda por encima de la rodilla de un amputado y que puede funcionar tanto en modo accionado como en modo no accionado, que comprende:
un pie artificial que tiene una punta y un talón;
un enlace de caña acoplado al pie artificial;
un enlace de muslo configurado para unirse a la extremidad inferior que queda encima de la rodilla de un amputado;
un mecanismo de rodilla que interconecta dicho enlace de muslo y dicho enlace de caña, permitiendo dicho mecanismo de rodilla los movimientos de flexión y extensión de dicho enlace de muslo y dicho enlace de caña entre sí;
un generador de torsión hidráulico interpuesto entre dicho enlace de caña y dicho enlace de muslo;
una unidad…
PRÓTESIS AUTOMÁTICA DE RODILLA.
(04/10/2018) Se ha inventado una prótesis automática de rodilla con movimientos de flexión-extensión y rotación pasiva automática axial, medial y lateral del tipo que comprende primeros medios de conexión para fijar la prótesis a un soporte de muñón o "socket" de una persona amputada de un miembro inferior; medios de articulación para simular un movimiento de flexión-extensión de rodilla; y segundos medios de conexión para fijar la prótesis a un elemento que simule el extremo distal de un miembro inferior; la cual además también comprende medios de rotación axial localizados dentro de los primeros medios de conexión para permitir el cambio de plano de la prótesis con respecto al soporte de muñón; medios…
PROCEDIMIENTO Y SISTEMA DE REHABILITACIÓN DE UNA EXTREMIDAD PARÉTICA.
(31/05/2018) Se proporcionan sistemas generadores para generar un decodificador neuromuscular-a-movimiento a partir de una extremidad sana. El sistema generador está configurado para recibir señales neuromusculares procedentes de sensores neuromusculares asociados con ubicaciones musculares/nerviosas predefinidas de al menos un par de músculos/nervios agonistas y antagonistas de la extremidad sana, obtenidas durante la realización por parte de la persona de un ejercicio predefinido (definido por datos de ejercicio predefinidos) con la extremidad sana; para recibir señales de movimiento procedentes de sensores de movimiento asociados a posiciones predefinidas de la extremidad sana, durante la realización por parte de la persona del…
Control de dispositivo de extremidad.
(03/01/2018) Unidad de control para controlar eléctricamente un dispositivo de extremidad eléctricamente controlable en forma de una extremidad artificial para un ser humano o una extremidad de robot, comprendiendo el dispositivo de extremidad una pluralidad de accionadores, comprendiendo la unidad de control una primera interfaz para conectar la unidad de control al dispositivo de extremidad, comprendiendo la unidad de control una segunda interfaz para conectar la unidad de control a un dispositivo de recopilación de datos que comprende uno o más dispositivos de detección, comprendiendo la unidad de control una unidad de procesamiento que está dispuesta para controlar el dispositivo de extremidad basándose al menos en datos recopilados por…
Prótesis automática para personas con amputación por encima de la rodilla.
(15/11/2017) Prótesis para personas con una amputación por encima de la rodilla, teniendo dicha prótesis un segmento femoral , que puede estar fijado a una conexión femoral , y un segmento tibial conectados de manera pivotante entre sí en torno a un eje de articulación que reproduce los movimientos de la rodilla, estando dicho segmento de tibia articulado mediante un tobillo (3a) a un pie (400b) que tiene dedos (400a), una planta del pie (400b) y un talón (400c), en la que dichos movimientos de la rodilla comprenden una fase de oscilación, entre levantar los dedos del pie (400a) del suelo y apoyar el talón (400c), y una fase de posicionado, que comprende apoyar el talón (400c), cargar la planta del pie (400b) y levantar los dedos del pie (400a) del suelo, estando dispuesto un amortiguador hidráulico que tiene respectivamente una bisagra superior…
Dispositivo sensitivo de presión aplicable a prótesis mioeléctricas de miembro superior.
(14/07/2017) 1. Dispositivo sensitivo de presión aplicable a prótesis mioeléctricas de miembro superior: comprendiendo dicha prótesis una mano electromecánica provista de unos dedos funcionales que realizan movimientos de apertura y cierre de la mano en función de unas señales mioeléctricas producidas por unos movimientos musculares del usuario; caracterizado porque comprende:
- al menos un sensor de fuerza resistivo montado en uno de los dedos funcionales de la mano electromecánica , y conectado a una unidad procesadora ;
- una unidad procesadora que procesa la señal recibida por el sensor de fuerza y proporciona una corriente de alimentación variable a un motor…
SISTEMA PARA ASISTIR A CAMINAR.
(26/05/2017). Solicitante/s: TECNIMUSA S.L. Inventor/es: GARCIA LEGAZ,JUAN, BEJARANO HERRUZO,Bartolomé.
Sistema para asistir a caminar a una persona, consistente en un exoesqueleto para adaptarse a la persona que comprende una pluralidad de estructuras articuladas para la flexión de las extremidades inferiores y una pluralidad de sensores. La pluralidad de sensores mide la flexión realizada en las articulaciones de las extremidades superiores y aplica un movimiento que se transmite a las extremidades inferiores por las estructuras articuladas en función de la flexión medida. Ventajosamente, el movimiento es generado por el propio individuo mientras camina y no precisa ser pre-programado.
Ayuda tecnológica para amputados transfemorales.
(30/11/2016). Solicitante/s: SCUOLA SUPERIORE DI STUDI UNIVERSITARI E DI PERFEZIONAMENTO SANT'ANNA. Inventor/es: CARROZZA, MARIA, CHIARA, VITIELLO,NICOLA, LENZI,TOMMASO, DE ROSSI,STEFANO MARCO MARIA, GIOVACCHINI,FRANCESCO, CEMPINI,MARCO.
Un dispositivo de ayuda para personas con discapacidad motora, particularmente adecuado para permitir la marcha de los amputados transfemorales, que comprende:
- una prótesis para un miembro amputado; y
- una órtesis adecuada para ser utilizada en otra parte del cuerpo,
en el que dicha prótesis y dicha órtesis están operativamente conectadas entre sí,
y en el que dicho dispositivo de ayuda comprende además una unidad de control en comunicación con dicha prótesis y dicha órtesis ,
caracterizado por que dicho dispositivo de ayuda comprende además un sistema sensorial, estando dicho sistema sensorial en comunicación con dicha unidad de control.
PDF original: ES-2615887_T3.pdf
Control coordinado para una prótesis de brazo.
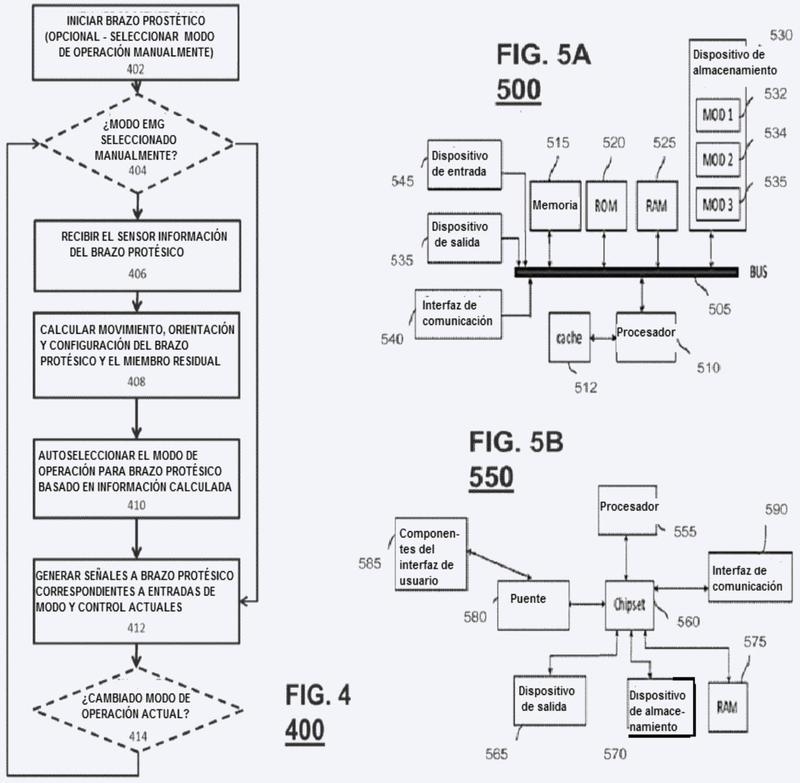
(09/03/2016). Ver ilustración. Solicitante/s: VANDERBILT UNIVERSITY. Inventor/es: GOLDFARB,Michael, ALSHAMMARY,NASSER, BENNETT,DANIEL, DALLEY,SKYLER.
Método para el control de una prótesis de brazo que tiene al menos una articulación accionada y al menos un sensor de medición de inercia (IMS) , caracterizado porque el método comprende:
determinar un movimiento de la prótesis de brazo con relación al marco de referencia inercial basado al menos en una salida del IMS;
generar señales de control para la al menos una articulación accionada basándose en el movimiento y la orientación del brazo protésico.
PDF original: ES-2642123_T3.pdf
Mejoras en o relacionadas con las prótesis y las órtesis.
(07/03/2016) Una prótesis o una órtesis que comprende:
un componente móvil ;
un motor eléctrico accionable para mover el componente , en el que el motor tiene al menos una entrada de corriente y/o tensión, la aplicación de la cual al motor resulta en que el componente tiene al menos una condición de funcionamiento;
un circuito de medición de la corriente que mide la corriente consumida por el motor , y/o un circuito de medición de la tensión que mide la caída de tensión en el motor; y
un dispositivo electrónico que controla el movimiento del componente móvil y almacena los valores de corriente y/o tensión predeterminados para el motor y una o más salidas resultantes de condiciones…
Prótesis de mano multifuncional y autónoma.
(24/02/2016) Una prótesis de mano articulada que tiene un metacarpo que se extiende sustancialmente a lo largo de un plano metacarpiano (M-M) y al menos un dedo pulgar que tiene una falange proximal conectada de manera rotativa al metacarpo y un dedo índice que tiene una falange proximal conectada de manera rotativa al metacarpo , que comprende:
- medios de flexión del dedo índice adecuados para hacer que el dedo índice rote alrededor de un eje de flexión sustancialmente paralelo al plano metacarpiano (M-M);
- medios de aducción del dedo pulgar adecuados para hacer que el dedo pulgar rote alrededor de un eje de aducción sustancialmente paralelo al plano metacarpiano (M-M) e inclinado con respecto al eje de flexión del dedo índice;
- un motor eléctrico integrado en la prótesis ;
…
Una prótesis o una ortosis y un método para controlar una prótesis o una ortosis.
(16/02/2016) Una prótesis o una ortosis que comprende:
una pluralidad de componentes móviles pudiendo cada componente ser movido por un respectivo motor ; y
un dispositivo de control que controla el movimiento de los componentes móviles y almacena valores de corriente predeterminados para los respectivos motores , caracterizada por que la prótesis o la ortosis comprende además un circuito de medida de corriente que mide la corriente obtenida por los respectivos motores ,
en la que el dispositivo de control compara la corriente medida por el circuito de medida de corriente con el valor de corriente predeterminado almacenado por un primer motor de manera que se determina cuándo el movimiento de al menos un primer componente movible…
Estructura de prótesis para amputados de un miembro inferior.
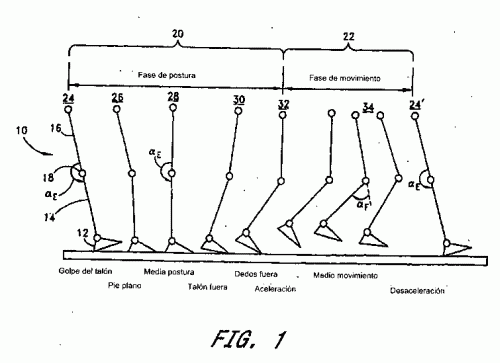
(22/12/2015) Una prótesis para amputados de un miembro inferior, comprendiendo dicha prótesis un segmento de pie y un segmento tibial articulados entre sí mediante pivotamiento en una articulación del tobillo , en donde el ciclo de forma de andar de dicha prótesis comprende una así denominada fase de oscilación, entre la retirada de la punta del pie y el apoyo del talón del pie y la así denominada fase de apoyo, que comprende el apoyo del talón , el apoyo de la planta y el desacoplamiento de la punta del pie,
en donde dicha articulación del tobillo comprende:
- un accionador , in particular, un motor de engranajes,
- un medio de microprocesador (70') que está adaptado para…
Aparato protésico y método de control.
(08/07/2015) Aparato protésico para un usuario, el aparato comprende:
una prótesis de miembro superior que comprende por lo menos un dígito que funciona mecánicamente ;
por lo menos un sensor configurado para estar dispuesto en el usuario, el por lo menos un sensor está operativo para sentir un recorrido descrito por el sensor durante el movimiento del mismo por parte del usuario y proporcionar una salida de recorrido sentido que depende del recorrido; y
un procesador operativo para permitir el accionamiento del por lo menos un dígito ,
caracterizado por que el procesador está operativo para permitir el accionamiento del por lo menos un dígito ,
dependiendo de la salida de recorrido sentido que tiene una característica predeterminada y de tal…
Método de controlar una prótesis.
(11/02/2015) Un método de controlar un componente móvil de una prótesis u ortosis , comprendiendo el método:
mover el componente por medio de un motor ;
caracterizado por que el método comprende los pasos adicionales de:
por medio de un aparato eléctrico:
determinar en qué momento se frena el movimiento del componente cuando este componente se apoya contra una superficie; y
proporcionar una pluralidad de impulsos eléctricos de accionamiento al motor en dependencia de la determinación y del momento en el que se frena el movimiento del componente para accionar así el motor a fin de hacer que el componente se apoye contra la superficie con mayor fuerza.
Cilindro de aire de amortiguación sin ajuste.
(07/01/2015) Cilindro de aire de amortiguación sin ajuste para su uso en una articulación de prótesis, que comprende:
un cuerpo de cilindro de aire , en el que una cámara de aire está formada en el interior del cuerpo de cilindro de aire ;
un pistón , en el que un extremo del pistón está dispuesto de forma deslizable en la cámara de aire y el otro extremo se extiende hasta el exterior del cuerpo del cilindro de aire ; el pistón divide la cámara de aire en una cámara de aire superior y una cámara de aire inferior , y efectúa un movimiento alternativo entre una primera posición y una segunda posición en la cámara de…
Articulación de rodilla para una prótesis.
(14/03/2012) Articulación de rodilla para una prótesis, que comprende un sistema de maniobra de las fases deimpulso con un pistón móvil con respecto a un cilindro y acoplado a una pieza de unión del muslo, y con elcilindro acoplado con una pieza de unión de la pierna, donde el cilindro puede girar alrededor de por lomenos un eje con respecto a la pieza de unión de la pierna, caracterizada por que el cilindro está acoplado aun medio elástico, que se apoya en la pieza de unión de la pierna a través de un punto de articulaciónalejado del eje.
DISPOSITIVO AVISADOR PARA DISCAPACITADOS AUDITIVOS.
(14/03/2012) 1. Dispositivo avisador para discapacitados auditivos, ya sean personas o animales, caracterizado porque está constituido a partir de una pulsera o correa , de cualquier material o combinación de materiales adecuados, a la que está asociada una carcasa , en cuyo seno se establece un micro-motor , con una excéntrica asociada a su eje de giro, conjunto que es alimentado por una pila o batería a través de un circuito de control cuya activación está vinculada a un receptor de radiofrecuencia complementario de un mando a distancia externo.
PRÓTESIS CON MIEMBROS DE DEDO OPERABLES MECÁNICAMENTE.
(09/02/2012) Una prótesis para proporcionar al menos un miembro de dedo operable mecánicamente, comprendiendo la prótesis : una rueda dentada de tornillo sinfín en un miembro de soporte de la prótesis ; un miembro de dedo que comprende un motor de accionamiento , estando el miembro de dedo montado para girar alrededor del eje de la rueda dentada de tornillo sinfín; un tornillo sinfín acoplado al motor de accionamiento y en engrane con la rueda dentada de tornillo sinfín de manera que cuando es activado el motor de accionamiento , durante el uso de la prótesis , el miembro de dedo se mueve alrededor de la rueda dentada de tornillo sinfín de tal manera que el miembro de dedo gira con respecto al miembro de soporte, estando el tornillo sinfín dispuesto al exterior del miembro de dedo ; y unos medios de transmisión configurados para acoplar…
PRÓTESIS DE ARTICULACIÓN DE RODILLA DE SEGURIDAD LIBRE DE FALLOS.
(03/06/2011) Prótesis de articulación de rodilla de seguridad libre de fallos, que presenta: Un dispositivo de unión con la pierna, el cual comprende un cuerpo principal , un zócalo , un elemento de accionamiento y una unidad de reposición , siendo limitado un espacio de alojamiento por la pared interior del cuerpo principal , y extendiéndose el zócalo partiendo de un extremo del cuerpo principal , y estando prevista la unidad de reposición en el espacio de alojamiento , y estando un extremo de la unidad de reposición unido con el elemento de accionamiento , mientras que el otro extremo de la misma está unido basculante con el cuerpo principal ; un dispositivo de unión con el muslo, que tiene una sección de unión y una sección de zócalo , estando la sección de unión provista en uno de sus extremos de un…
CONTROL DE UNA PRÓTESIS PASIVA DE ARTICULACIÓN DE RODILLA CON AMORTIGUAMIENTO AJUSTABLE.
(12/01/2011) Control de una articulación pasiva de prótesis de rodilla con amortiguamiento ajustable en la dirección de flexión para adaptar un equipo de prótesis con medios de conexión por el lado superior y un elemento de unión con un pie artificial, fijado a la prótesis de articulación de la rodilla, a la subida de escaleras, caracterizado por las siguientes etapas: - detección de una fase de elevación mediante detección de un levantamiento con un momento reducido del pie de prótesis y - descenso del amortiguamiento de flexión en la fase de levantamiento hasta por debajo de un nivel adecuado para marchar en llano
PROTESIS CON MIEMBROS EN FORMA DE DEDO QUE PUEDEN OPERARSE MECANICAMENTE.
(07/04/2010) Prótesis para proporcionar por lo menos un miembro en forma de dedo que puede operarse mecánicamente, teniendo la prótesis por lo menos un dicho miembro en forma de dedo que se extiende en general tangencialmente con respecto a una rueda del engranaje de tornillo sin fin fija en un elemento de soporte de la prótesis, estando el miembro en forma de dedo montado para rotar en torno al eje de la rueda del engranaje de tornillo sin fin , comprendiendo el miembro en forma de dedo un motor operable para accionar un tornillo sin fin , estando el tornillo sin fin engranado con la rueda del engranaje de tornillo sin fin fija de manera que cuando se pone en funcionamiento el motor , durante el uso de la prótesis,…
SISTEMA COMPUESTO POR UN LINER Y UNA UNIDAD DE ELECTRODO MIOELECTRICA.
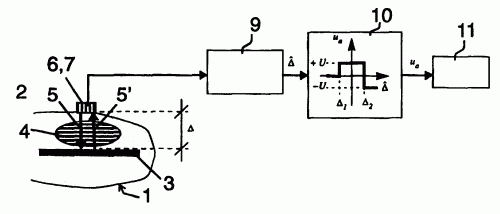
(02/03/2010) Sistema compuesto por un liner dispuesto entre un muñón de amputación y una caña de prótesis y una unidad de electrodos mioeléctrica para captar señales mioeléctricas, en la que la unidad de electrodos presenta una unidad de medida , dispuesta sobre la cara del liner orientada hacia el muñón de amputación y una unidad receptora dispuesta sobre la cara del liner opuesta al muñón de amputación , caracterizado porque la unidad de medida presenta un emisor para la transmisión inalámbrica de las señales mioeléctricas a un receptor en la unidad receptora
PROTESIS DE EXTREMIDAD INFERIOR CON PIE DE PROTESIS PIVOTANTE.
(16/12/2006) Prótesis de extremidad inferior para la adaptación a un muñón de muslo, que consta de un adaptador para una articulación de rodilla , una articulación de rodilla fijada a éste y una pierna de prótesis acoplada a la articulación de rodilla , con un pie de prótesis articulado a esta pierna, el cual puede pivotar a una posición con apoyo de talón, en que la articulación de rodilla está conformada de tal modo que al producirse la transición desde la posición extendida a la posición flexionada realiza un movimiento de rodadura-deslizamiento combinado en torno a un eje de pivotamiento , de tal modo que la distancia de un punto (D), situado delante del eje de pivotamiento según una vista dorsal, respecto al extremo de la pierna de prótesis se reduce constantemente…
TRATAMIENTO DE INCONTINENCIA ANAL CON SUMINISTRO DE ENERGIA INALAMBRICA CONTROLADA.
(01/04/2006) Un aparato de tratamiento de incontinencia anal, que comprende: un dispositivo de restricción para acoplar el colon o recto para formar un pasaje restringido fecal en el colon o recto, el dispositivo de restricción que es operable para cambiar la restricción del pasaje fecal, una fuente interna de energía implantable en el paciente, y un dispositivo de control operable desde el exterior del cuerpo del paciente para controlar la fuente interna de energía para liberar energía para uso junto con la operación del dispositivo de restricción , caracterizado en que el aparato comprende: una fuente externa de energía se propone para estar externa al cuerpo del paciente cuando el dispositivo de restricción se implanta en el mismo, la fuente externa de energía se adapta para liberar la energía…
PROTESIS DE RODILLA CONTROLADA ELECTRONICAMENTE.
(01/03/2006). Ver ilustración. Solicitante/s: MASSACHUSETTS INSTITUTE OF TECHNOLOGY. Inventor/es: DEFFENBAUGH, BRUCE, W., HERR, HUGH, M., PRATT, GILL, A., WITTIG, MICHAEL, B.
Prótesis de rodilla controlada electrónicamente comprendiendo: - una pluralidad de rotores que pueden girar alrededor de un eje longitudinal de dicha prótesis de rodilla ; - una pluralidad de estatores alternativamente intercalados con dichos rotores para formar espacios entre ellos; - un fluido adaptado para soportar un cambio reológico en respuesta a un campo magnético aplicado y que reside en dichos espacios formados entre dichos rotores y dichos estatores ; en la que la variación controlada de dicho campo magnético varía la reología del fluido y la cizalladura de dicho fluido causada por el giro entre dichos rotores y dichos estatores durante la rotación de la rodilla y genera un momento de torsión variable de amortiguamiento de la rodilla.
DISPOSITIVO PARA CONTROLAR LAS PROTESIS Y OTROS DISPOSITIVOS DE AYUDA.
(16/08/2002). Ver ilustración. Solicitante/s: LEIV EIRIKSSON NYFOTEK AS. Inventor/es: STAVDAHL, OYVIND, GRONNINGSAETER, AAGE.
SE DESCRIBE UN METODO PARA CONTROLAR PROTESIS Y OTROS DISPOSITIVOS DE ASISTENCIA QUE UTILIZAN UN TEJIDO CUYO ESTADO ES INFLUENCIADO POR EL SISTEMA NERVIOSO CENTRAL DEL USUARIO. SE DETECTA EL ESTADO DEL TEJIDO Y LA INFORMACION DE ESTA DETECCION SE INTRODUCE EN UNA UNIDAD QUE ESTIMA LA INTENCION MOTORA DEL USUARIO Y CONTROLA LA PROTESIS SEGUN ESTA ESTIMACION. EL METODO COMPRENDE LA TRANSMISION DE SEÑALES DE ULTRASONIDO AL TEJIDO MEDIANTE EL USO DE UN TRANSDUCTOR DE ULTRASONIDOS Y A CONTINUACION LA RECEPCION DE LAS SEÑALES DE ULTRASONIDOS MODULADAS POR EL TEJIDO MEDIANTE EL USO DE UN TRANSDUCTOR DE ULTRASONIDOS . SE ESTIMA LA INTENCION MOTORA DEL USUARIO SOBRE LA BASE DE ESTAS SEÑALES DE ULTRASONIDO RECIBIDAS, Y SOBRE LA BASE DE LA ESTIMACION MENCIONADA SE CONTROLAN VARIOS ESTADOS DE LA PROTESIS.
PROTESIS EXTERNA DE PIERNA.
(16/06/2002). Solicitante/s: SCHITT & GRUNDEI ORTHOPIDIETECHNIK GMBH. Inventor/es: GRUNDEI, HANS, DR..
Prótesis externa de pierna tiene un adaptador para una junta de rodilla y prótesis inferior de pierna, elemento de transmisión de fuerza, elemento de unión y estructura de malla. La prótesis externa de la pierna tiene un adaptador para una articulación de rodilla y a una prótesis inferior de pierna unida a ella. Un elemento de transmisión de fuerza , unida a la prótesis inferior de pierna , comprende un riñón con un elemento de conexión unido al lado de la cadera y con forma de estribo para fijarla a los músculos de estirado. El adaptador se sitúa en una parte vástago proximal en el hueso tubular de la cadera. La parte vástago está cubierta al menos parcialmente por una estructura tridimensional en malla de rejilla abierta . El extremo distal tiene una unión para la articulación de rodilla.
PROTESIS DE LA PIERNA CON UNA ARTICULACION ARTIFICIAL DE LA RODILLA DOTADA DE DISPOSITIVO DE AJUSTE.
(16/12/2000). Ver ilustración. Solicitante/s: BIEDERMANN MOTECH GMBH. Inventor/es: BIEDERMANN, LUTZ.
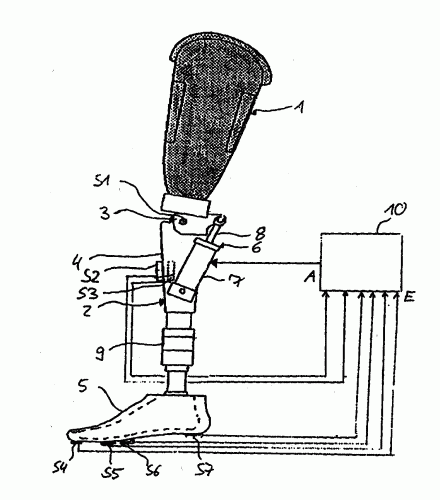
LA INVENCION SE REFIERE A UNA PROTESIS DE PIERNA, CON UNA ARTICULACION ARTIFICIAL DE LA RODILLA DOTADA DE UN DISPOSITIVO DE CONTROL DE LA FASE DE OSCILACION Y UN FRENO DE RETROCESO. LA PROTESIS DE LA INVENCION TIENE UN ELEMENTO AMORTIGUADOR QUE ACTUA SOBRE LA ARTICULACION DE LA RODILLA, Y SENSORES PARA MEDIR LA FUERZA, EL ANGULO DE LA RODILLA Y LA ACELERACION, ADEMAS DE UNA UNIDAD DE CONTROL QUE SE UTILIZA PARA CONTROLAR LA AMORTIGUACION DEL CITADO ELEMENTO AMORTIGUADOR DE ACUERDO CON LOS VALORES MEDIDOS. EL ELEMENTO AMORTIGUADOR MODIFICA SU PROPIEDAD DE AMORTIGUACION SOBRE LA BASE DE UN CAMBIO DE LA VISCOSIDAD DEL LIQUIDO MAGNETO - REOLOGICO, SEGUN LAS SEÑALES DE CONTROL GENERADAS POR LA UNIDAD DE CONTROL.
ARTICULACION FRENADA DE RODILLA.
(01/10/2000) LA INVENCION SE REFIERE A UN ROTULA DE FRENADO PARA UNA PROTESIS DE PIERNA, CON UNA PARTE SUPERIOR DE ARTICULACION, UNA PARTE INFERIOR DE ARTICULACION, UN EJE DE ARTICULACION QUE SE UNE DE FORMA FIJA DE GIRO CON UNA PARTE DE ARTICULACION Y UNA PALANCA DE OSCILACION QUE FORMA LA PARTE MEDIA DE ARTICULACION, QUE ESTA SUJETA CON SU EXTREMO EN EL LADO DE EXTENSION EN UN EJE DE OSCILACION QUE SE DISPONE DE FORMA PARALELA, VENTRAL Y DISTAL CON RESPECTO AL EJE DE ARTICULACION Y ABARCA CON SUS EXTREMOS LOS LADOS DE DOBLADO EL EJE DE ARTICULACION, ESTANDO EQUIPADO CON UN EQUIPO DE FRENADO QUE SE CONTROLA A TRAVES DE UNA CARGA DEL PIE. PARA LA MEJORA DE LA CONSTRUCCION…
(01/01/2000). Solicitante/s: OTTO BOCK ORTHOPADISCHE INDUSTRIE BESITZ- UND VERWALTUNGS-KOMMANDITGESELLSCHAFT. Inventor/es: KRUKENBERG, MANFRED.
LA INVENCION SE REFIERE A UNA ARTICULACION DE PROTESIS EN PARTICULAR ARTICULACION DE CADERA O DE RODILLA, CON UNA PARTE SUPERIOR DE ARTICULACION, UNA PARTE INFERIOR DE ARTICULACION, UN EJE DE ARTICULACION QUE UNE AMBAS PARTES DE ARTICULACION UNIDAS UNA CON OTRA DE FORMA OSCILANTE, EN DISPOSICION FIJA DE GIRO CON UNA PARTE DE ARTICULACION Y UNA AMORTIGUACION DE LA OSCILACION DE ARTICULACION. PARA LA OBTENCION EN PARTICULAR DE UNA CONFIGURACION COMPACTA DE LA ARTICULACION SE PROPONE DE ACUERDO CON LA INVENCION, QUE LA AMORTIGUACION ESTE INTEGRADA EN UNA DE AMBAS PARTES DE ARTICULACION E IMPULSADA DE FORMA INMEDIATA CON EL EJE DE ARTICULACION UNIDO DE FORMA FIJA DE GIRO CON LA OTRA PARTE DE ARTICULACION.
{kind=link}
{kind=link}
{kind=link}
{kind=link}