Articulación de rodilla para una prótesis.
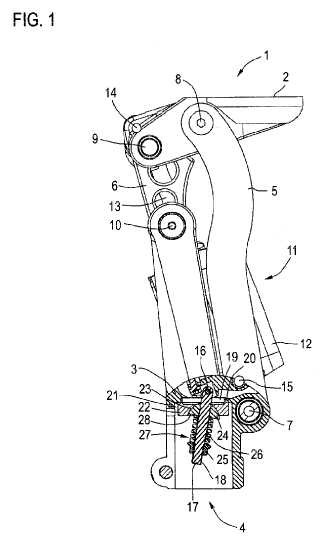
Articulación (1) de rodilla para una prótesis, que comprende un sistema (11) de maniobra de las fases deimpulso con un pistón móvil con respecto a un cilindro (12) y acoplado a una pieza (2) de unión del muslo,
y con elcilindro (12) acoplado con una pieza (3) de unión de la pierna, donde el cilindro (12) puede girar alrededor de por lomenos un eje con respecto a la pieza (3) de unión de la pierna, caracterizada por que el cilindro (12) está acoplado aun medio (27) elástico, que se apoya en la pieza (3) de unión de la pierna a través de un punto (16) de articulaciónalejado del eje.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10188705.
Solicitante: MEDI GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: MEDICUSSTRASSE 1 95448 BAYREUTH ALEMANIA.
Inventor/es: Hsin,Fa Shen.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61F2/64 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00). › Articulaciones de la rodilla.
- A61F2/68 A61F 2/00 […] › Medios de accionamiento o de control.
PDF original: ES-2384219_T3.pdf
Fragmento de la descripción:
Articulación de rodilla para una prótesis El invento se refiere a una articulación de rodilla para una prótesis, que comprende un sistema de maniobra para las fases de impulso con un pistón móvil respecto de un cilindro y acoplado a una pieza de unión del muslo, y con el cilindro acoplado a una pieza de unión de la pierna, pudiendo girar el cilindro con respecto a la pieza de unión del muslo alrededor de por lo menos un eje.
Ya se conocen articulaciones con un llamado sistema de maniobra para las fases de impulso en el estado actual de la técnica. Un sistema de maniobra para las fases de impulso sirve para el propósito de aprovechar al andar las fuerzas existentes en la articulación de la rodilla dispuesta en una prótesis, de modo que se produzca un doblado (flexión) de la rodilla (la llamada fase de impulso) , que corresponda, en la mayor medida posible, al proceso de marcha realizado con una articulación natural. Para ello, el sistema de maniobra para las fases de impulso comprende habitualmente un pistón conducido en un cilindro, que puede moverse con respecto al cilindro. El espacio vacío, al moverse el pistón en el interior del cilindro, define con ello, por ejemplo, dos cámaras, conociéndose, por ejemplo, por medio de la configuración de las trayectorias del aire o de la previsión de medios adicionales, por ejemplo, muelles, controlar las fases de impulso satisfaciendo, en la mayor medida posible, un movimiento de marcha real y las necesidades de comodidad de los que utilizan la prótesis.
Un elemento importante en las actuales articulaciones de rodilla es la seguridad de la fase de apoyo, lo que significa evitar, en la mayor medida posible, que se doble la articulación de la rodilla, cuando la articulación de la rodilla está sometida a una carga en la fase de apoyo. Para ello es necesario generar una fuerza que empuje hacia atrás la articulación de la rodilla en la posición extendida. Se propuso, para ello, por ejemplo, en el documento EP 0 700 491 B1, prever en una segunda cámara del lado de la pierna, definida por el pistón en el cilindro, un muelle apoyado en una parte inferior del cilindro y precargar elásticamente el pistón hacia la parte superior del cilindro. En el funcionamiento, se amortigua, con ello, el movimiento de flexión por medio del muelle, acelerándose, por el contrario, el movimiento de extensión por medio del muelle.
No obstante, esto tiene el inconveniente, en especial también en articulaciones de rodilla multicéntricas, de que con flexión creciente tiene lugar una carga elástica previa creciente del muelle, de modo que se forme una fuerza ininterrumpidamente creciente, que actúa en el sentido de la extensión. Pero esto afecta al funcionamiento del sistema de maniobra para las fases de impulso, ya que se generan fuerzas permanentemente crecientes que actúan en el sentido de la extensión. Se requiere además el funcionamiento del seguro de la fase de apoyo con una fuerza claramente creciente, esto último sólo en el caso de pequeños ángulos de flexión de la articulación de rodilla (ángulos de flexión, o sea, el ángulo que adoptan la pieza del muslo y la pieza de la pierna entre sí) .
Precisamente, con las articulaciones de rodilla multicéntricas para prótesis, es importante y deseable una trayectoria de la fuerza, que aumente considerablemente en el caso de pequeños ángulos, pues sólo una articulación de rodilla de prótesis multicéntrica estirada al máximo no se dobla al hacer contacto el pie.
Se conocen articulaciones multicéntricas asimismo fundamentales en el estado actual de la técnica, compárese para ello, por ejemplo, el artículo “Polyzentrische Gelenke in der Prothetik - Eigenschaften und Einsatzbereiche” (Articulaciones Multicéntricas en la Protética – Propiedades y Ámbitos de Aplicación) de W. Kaphingst y G. Stark, en: Orthopädie-Technik (Técnica Ortopédica) 7/01, páginas 484 a 490. Se caracterizan finalmente por que el movimiento de flexión no tiene lugar por medio de un eje, que une una pieza de unión del muslo con una pieza de unión de la pierna, sino que el movimiento se facilita por varios ejes, de modo que pueda tener lugar un desarrollo del movimiento más complejo, más bien adecuado al comportamiento deseado de la articulación de la rodilla. Habitualmente, la pieza de unión del muslo y la pieza de unión de la pierna se acoplan además mediante por lo menos una pieza intercalada, pudiéndose realizar uniones mediante cojinetes axiales. Una forma conocida de una articulación multicéntrica es, por ejemplo, la llamada geometría de cuatro ejes. Además, la pieza de unión con el muslo (cabeza de la rodilla) y la pieza de unión con la pierna (asiento para unir con una parte de la pierna) se han acoplado mutuamente mediante una primera pieza intercalada más corta y una segunda más larga. Una articulación de cuatro ejes de este tipo se conoce, por ejemplo, a partir del documento WO 03/092545 A2.
A partir del documento US 2002/0026246 A1, se conoce una articulación de rodilla con cinco secciones de unión mutuamente unidas, habiéndose previsto un elemento elástico entre dos secciones de articulación mutuamente unidas, previstas en la zona inferior de la articulación de rodilla, mediante el cual se aumenta el ángulo formado por esas dos secciones de unión.
A partir del documento EP 1 570 817 A1, se conoce una articulación de rodilla con función de frenado, en la que es posible detectar mecánicamente qué parte del pie se ha cargado. Para ello, se ha previsto un mecanismo de unión,
mediante el cual tiene lugar la detección de la carga. En función de la detección de la carga, se controla, acto seguido, un freno hidráulico.
El documento WO 2007/025116 describe una prótesis de pierna con una articulación de rodilla activa con un servomotor asociado y un mecanismo amortiguador, que se controlan por medio de un sistema de control electrónico.
Finalmente, se conoce a partir del documento DE 203 06 821 U1 una disposición de articulación de rodilla, que está en disposición de mantener un ángulo de rodilla entre una pierna y un muslo, cuando la disposición de articulación de rodilla está en una superficie horizontal o inclinada.
El pistón del sistema de maniobra para las fases de impulso puede estar unido además con la pieza de unión del muslo por medio de su vástago de pistón directamente apoyado giratoriamente, mientras que el cilindro se ha dispuesto apoyado giratoriamente en la segunda pieza intercalada más larga. Es importante resaltar que los ejes de giro, que acoplan el sistema de maniobra para las fases de impulso a los componentes de la articulación de la rodilla, no corresponden, en general, a los ejes, con los que las distintas piezas parciales de la articulación de rodilla están mutuamente unidas en el marco de la geometría multicéntrica, por ejemplo, de una geometría de cuatro ejes.
Los conceptos de pieza de unión del muslo, pieza de unión de la pierna y pieza intercalada se han de entender además de modo que puedan constar enteramente de varios componentes, aunque estén mutuamente unidos rígidamente o estén acoplados cinéticamente de forma rígida y, por consiguiente, formen una unidad cinética rígida. Por ejemplo, también se conocen piezas intercaladas, que se componen de dos placas de unión enfrentadas, que limitan los correspondientes cojinetes axiales.
Se le plantea, por tanto, al invento la misión de proporcionar una articulación de rodilla multicéntrica para una prótesis, en la cual sea posible una garantía de la fase de apoyo con una mejor trayectoria de la fuerza adecuada a dicho propósito.
Para solucionar este problema, se ha previsto según el invento que, en una articulación de rodilla del tipo mencionado al principio, se acople el cilindro mediante un punto de articulación alejado del eje en un medio elástico apoyado en la pieza de unión de la pierna.
El invento propone, pues, no prever ya más un medio elástico, como se conoce, dentro del sistema de maniobra para las fases de impulso para asegurar la fase de apoyo, sino que propone un medio elástico, que se apoya en la pieza de unión de la pierna, que aprovecha el giro del cilindro con respecto a la pieza de unión de la pierna, con la cual vaya acompañada, por lo tanto, una modificación de la distancia del punto de articulación alejado del eje para formar, sobre ello, un par de giro opuesto al giro del movimiento de flexión incipiente, que genere, por consiguiente, una fuerza que actúe en el sentido de la extensión, que dé lugar... [Seguir leyendo]
Reivindicaciones:
1. Articulación (1) de rodilla para una prótesis, que comprende un sistema (11) de maniobra de las fases de impulso con un pistón móvil con respecto a un cilindro (12) y acoplado a una pieza (2) de unión del muslo, y con el cilindro (12) acoplado con una pieza (3) de unión de la pierna, donde el cilindro (12) puede girar alrededor de por lo menos un eje con respecto a la pieza (3) de unión de la pierna, caracterizada por que el cilindro (12) está acoplado a un medio (27) elástico, que se apoya en la pieza (3) de unión de la pierna a través de un punto (16) de articulación alejado del eje.
2. Articulación de rodilla según la reivindicación 1, caracterizada por que se ha previsto una unión (11) articulada en el medio (27) elástico para compensar un movimiento relativo entre la pieza (3) de unión de la pierna y el cilindro (12) .
3. Articulación de rodilla según la reivindicación 2, caracterizada por que la unión (11) articulada comprende un tejuelo (22) de articulación, que incluye una cápsula (23) especialmente en forma de casquete, dispuesta en la pieza (3) de unión de la pierna, y un cuerpo 24) de articulación especialmente en forma de casquete a colocar en la cápsula (23) .
4. Articulación de rodilla según la reivindicación 3, caracterizada por que el tejuelo (22) de articulación y el cuerpo (24) de articulación presentan una abertura de paso para un vástago (17) , unido articuladamente en el punto
(16) de articulación al cilindro (12) , alrededor de cuyo vástago (17) se extiende el medio (27) elástico, configurado en forma de al menos un muelle (26) y que se apoya en una superficie (28) del cuerpo (24) de articulación opuesta a la cápsula (23) , y en un medio de apoyo previsto en un extremo del vástago (17) opuesto al cilindro (12) .
5. Articulación de rodilla según la reivindicación 4, caracterizada por que el vástago (17) se ha realizado como vástago (17) roscado y el medio de tope, como tuerca (25) roscada desplazable en la rosca (18) .
6. Articulación de rodilla según una de las reivindicaciones precedentes, caracterizada por que se puede regular la tensión inicial del medio (27) elástico.
7. Articulación de rodilla según una de las reivindicaciones precedentes, caracterizada por que, con un movimiento de flexión en un primer intervalo angular de flexión prefijado, que comienza en 0º, especialmente con un intervalo angular de flexión, que termina con un ángulo menor de 20º, preferiblemente menor de 10º, tiene lugar un giro del cilindro (12) alrededor del eje o de al menos un eje y así se forma una fuerza de tensión previa en el medio
(27) elástico, que genera un par de giro de sentido opuesto.
8. Articulación de rodilla según la reivindicación 7, caracterizada por que en un segundo intervalo angular de flexión, que termina especialmente en 90º, seguido al primer intervalo angular de flexión, ya no aparece giro esencial alguno del cilindro (12) .
Patentes similares o relacionadas:
Dispositivo de cierre con un equipo de ajuste para el giro automático de un elemento de unión de una pieza de cierre hacia una posición de cierre, del 13 de Mayo de 2020, de Fidlock GmbH: Dispositivo de cierre, con al menos una primera y una segunda pieza de cierre , que pueden unirse entre sí para cerrar el dispositivo […]
Rodilla protésica transfemoral semiaccionada, del 3 de Abril de 2019, de THE REGENTS OF THE UNIVERSITY OF CALIFORNIA: Un dispositivo de rodilla protésica semiaccionada , configurado para acoplarse a una extremidad inferior que queda por encima de la rodilla de […]
PRÓTESIS AUTOMÁTICA DE RODILLA, del 4 de Octubre de 2018, de UNIVERSIDAD DE GUADALAJARA: Se ha inventado una prótesis automática de rodilla con movimientos de flexión-extensión y rotación pasiva automática axial, medial y lateral del tipo que comprende primeros […]
PROCEDIMIENTO Y SISTEMA DE REHABILITACIÓN DE UNA EXTREMIDAD PARÉTICA, del 31 de Mayo de 2018, de FUNDACION TECNALIA RESEARCH & INNOVATION: Se proporcionan sistemas generadores para generar un decodificador neuromuscular-a-movimiento a partir de una extremidad sana. El sistema generador […]
Control de dispositivo de extremidad, del 3 de Enero de 2018, de OTTO BOCK HEALTHCARE GMBH: Unidad de control para controlar eléctricamente un dispositivo de extremidad eléctricamente controlable en forma de una extremidad artificial para un ser […]
Prótesis automática para personas con amputación por encima de la rodilla, del 15 de Noviembre de 2017, de Officine Ortopediche Rizzoli S.r.l: Prótesis para personas con una amputación por encima de la rodilla, teniendo dicha prótesis un segmento femoral , que puede estar fijado a una conexión femoral , y un […]
Dispositivo sensitivo de presión aplicable a prótesis mioeléctricas de miembro superior, del 14 de Julio de 2017, de CENTRO ORTOPEDICO TECNOLOGICO S.L.U: 1. Dispositivo sensitivo de presión aplicable a prótesis mioeléctricas de miembro superior: comprendiendo dicha prótesis una mano electromecánica […]
SISTEMA PARA ASISTIR A CAMINAR, del 26 de Mayo de 2017, de TECNIMUSA S.L: Sistema para asistir a caminar a una persona, consistente en un exoesqueleto para adaptarse a la persona que comprende una pluralidad de estructuras […]