PROTESIS CON MIEMBROS EN FORMA DE DEDO QUE PUEDEN OPERARSE MECANICAMENTE.
Prótesis (1) para proporcionar por lo menos un miembro en forma de dedo que puede operarse mecánicamente,
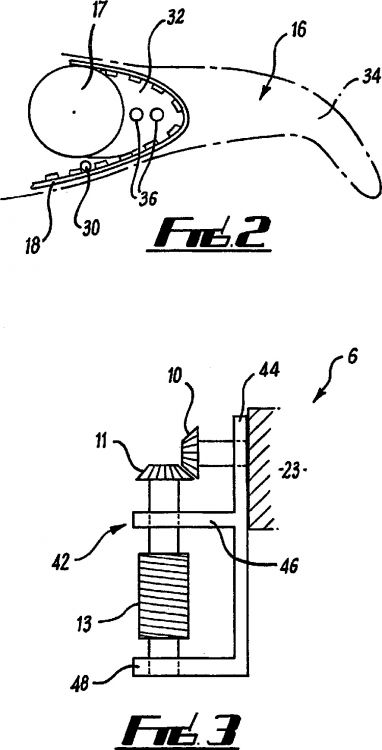
teniendo la prótesis (1) por lo menos un dicho miembro en forma de dedo (3) que se extiende en general tangencialmente con respecto a una rueda del engranaje de tornillo sin fin fija (5) en un elemento de soporte de la prótesis, estando el miembro en forma de dedo (3) montado para rotar en torno al eje de la rueda del engranaje de tornillo sin fin (8), comprendiendo el miembro en forma de dedo (3) un motor (7) operable para accionar un tornillo sin fin (13), estando el tornillo sin fin engranado con la rueda del engranaje de tornillo sin fin fija (5) de manera que cuando se pone en funcionamiento el motor (7), durante el uso de la prótesis, el miembro en forma de dedo (3) se mueve alrededor de la rueda del engranaje de tornillo sin fin fija (5), caracterizada porque el tornillo sin fin (13) y el motor (7) se disponen en los lados opuestos del eje de la rueda del engranaje de tornillo sin fin (8) y el tornillo sin fin (13) se dispone por fuera del miembro en forma de dedo (3)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2006/002680.
Solicitante: TOUCH EMAS LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: 3 GLENFINLAS STREET,EDINBURGH EH3 6AQ.
Inventor/es: GOW, DAVID, JAMES.
Fecha de Publicación: .
Fecha Concesión Europea: 4 de Noviembre de 2009.
Clasificación Internacional de Patentes:
- A61F2/58H
- A61F2/68 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00). › Medios de accionamiento o de control.
Clasificación PCT:
Fragmento de la descripción:
Prótesis con miembros en forma de dedo que pueden operarse mecánicamente.
Campo de la invención
La presente invención se refiere a unas prótesis con por lo menos un miembro en forma de dedo que puede operarse mecánicamente.
Antecedentes de la invención
Se conocen prótesis de manos que proporcionan uno o más miembros operables electromecánicamente por la persona que lo lleve puesto. Las prótesis convencionales utilizan a menudo un motor eléctrico montado en la propia mano y transmiten una fuerza motriz a los miembros por medio de un sistema de transmisión que implica unas uniones mecánicas. Tales prótesis convencionales tiene una serie de defectos, en particular un requisito de una alineación precisa entre el motor y el sistema de transmisión, que puede llevar a una configuración incómoda, y la imposición de unos requisitos de espacio en la parte de la mano de la prótesis, que pueden hacer que la prótesis resulte inadecuada para un paciente con algún miembro residual.
El documento US 4.623.354 describe una prótesis de mano convencional de este tipo en la que los motores se disponen en la mano. La fuerza motriz se transmite desde uno de los motores a un dedo por medio de un sistema de transmisión que comprende un mecanismo de engranaje de tornillo sin fin.
El documento WO 95/24875 describe una prótesis de mano que aborda los defectos de las prótesis convencionales reseñados anteriormente. Más concretamente, la prótesis de mano del documento WO 95/24875 comprende un motor y una caja de engranajes montados dentro del miembro en forma de dedo. El funcionamiento del motor acciona un tornillo sin fin situado dentro del miembro en forma de dedo. El tornillo sin fin engrana con y se mueve alrededor de una rueda del engranaje de tornillo sin fin fija para mover el miembro en forma de dedo en torno al eje de la rueda del engranaje de tornillo sin fin.
El presente inventor ha observado determinados defectos de las prótesis de manos del documento WO 95/24875. Más concretamente, el tamaño de los componentes electromecánicos dentro del miembro en forma de dedo hace difícil proporcionar unos dedos protésicos cortos con motores de potencia suficiente y con engranajes de radios apropiados, de manera que resulten adecuados para los niños.
Es por tanto un objetivo de la presente invención proporcionar una prótesis con un miembro en forma de dedo configurado para proporcionar un miembro pequeño de manera que resulte adecuado para los niños.
Exposición de la invención
La presente invención ha sido ideada en vista de la observación anteriormente reseñada y de esta manera desde un primer aspecto se proporciona una prótesis para proporcionar por lo menos un miembro en forma de dedo que puede operarse mecánicamente, teniendo la prótesis por lo menos un dicho miembro en forma de dedo que se extiende en general tangencialmente con respecto a una rueda del engranaje de tornillo sin fin, fija en un elemento de soporte de la prótesis, estando el miembro en forma de dedo montado para rotar en torno al eje de la rueda del engranaje de tornillo sin fin, comprendiendo el miembro en forma de dedo un motor que puede operarse para accionar un tornillo sin fin, estando el tornillo sin fin engranado con la rueda del engranaje de tornillo sin fin de manera que cuando se pone en funcionamiento el motor, durante el uso de la prótesis, el miembro en forma de dedo se mueve alrededor de la rueda del engranaje de tornillo sin fin, caracterizado porque el tornillo sin fin y el motor están dispuestos en los lados opuestos del eje de la rueda del engranaje de tornillo sin fin y el tornillo sin fin está dispuesto por fuera del miembro en forma de dedo.
De esta manera, el medio de tornillo sin fin se dispone por fuera del miembro en forma de dedo. Disponer el medio de tornillo sin fin por fuera del miembro en forma de dedo reduce la cantidad de espacio longitudinal ocupado por los componentes electromecánicos dentro del miembro en forma de dedo. Esto permite diseñar miembros en forma de dedo más cortos de manera que resulten adecuados para los niños. En contraposición, la prótesis de mano del documento WO 95/24875 tiene un medio de tornillo sin fin (es decir, el tornillo sin fin) dispuesto dentro del miembro en forma de dedo como se muestra en la Figura 2 del documento WO 95/24875.
Más concretamente, el medio de tornillo sin fin puede extenderse lateralmente hasta el miembro en forma de dedo.
De manera alternativa o además, el medio de tornillo sin fin puede extenderse de manera prácticamente perpendicular al miembro en forma de dedo.
Disponer el medio de tornillo sin fin de tal manera permite el movimiento de los componentes electromecánicos que incluye el motor hacia el medio de rueda del engranaje de tornillo sin fin.
En una forma de la invención, la prótesis puede comprender adicionalmente un medio de transmisión configurado para acoplar el movimiento del motor al medio de tornillo sin fin.
Más concretamente, el medio de transmisión puede configurarse de manera que el eje de rotación del medio de tornillo sin fin se incline hacia el eje de rotación del motor.
Más concretamente, el eje de rotación del medio de rueda sin fin puede inclinarse aproximadamente 90 grados hacia el eje de rotación del motor.
De manera alternativa o además, el medio de transmisión puede comprender uno primer y un segundo engranaje cónico que engranan uno con el otro, estando el primer engranaje cónico configurado para moverse en respuesta al movimiento del motor y estando el segundo engranaje cónico acoplado al medio de tornillo sin fin.
De manera alternativa o adicionalmente, el medio de rueda del engranaje de tornillo sin fin tiene un perfil que le permite disponerse respecto al miembro en forma de dedo de manera que una distancia entre el eje del medio de rueda del engranaje de tornillo sin fin y el miembro en forma de dedo sea inferior a un radio máximo del medio de rueda del engranaje de tornillo sin fin. El radio máximo puede estar entre el eje del medio de rueda del engranaje de tornillo sin fin y un punto en el borde periférico del medio de rueda del engranaje de tornillo sin fin que, durante su uso, engrana con el medio de tornillo sin fin.
Esto aprovecha las formas de la invención en las que sólo una parte del borde periférico del medio de rueda del engranaje de tornillo sin fin engrana con el medio de tornillo sin fin durante el uso de la prótesis. De esta manera, el medio de rueda del engranaje de tornillo sin fin puede situarse más cerca del miembro en forma de dedo de lo que sería el caso en el que el medio de rueda del engranaje de tornillo sin fin tendría un perfil circular, de manera que se puede proporcionar una prótesis más compacta.
Más concretamente, el medio de rueda del engranaje de tornillo sin fin puede tener un perfil que sea más o menos semicircular.
Más concretamente, un borde periférico curvado del semicírculo puede orientarse para engranar con el medio de tornillo sin fin.
De manera alternativa o además, el miembro en forma de dedo puede ser uno de un miembro en forma de dedo de la mano y un miembro en forma de pulgar.
De manera alternativa o además, el medio de tornillo sin fin puede comprender un tornillo sin fin.
De manera alternativa o además, el motor puede ser un motor de corriente continua de imanes permanentes con una relación prácticamente lineal entre el par y la corriente de transmisión.
De manera alternativa o adicionalmente, el motor puede acoplarse mediante un eje de salida del mismo a un sistema de engranajes de manera que durante su uso puedan seleccionarse diferentes razones de velocidad del par de salida y de transmisión de entre un rango de relaciones diferentes.
De manera alternativa o además, la prótesis puede tener una pluralidad de dedos cada uno con por lo menos un miembro en forma de dedo y la prótesis puede proporcionarse con un medio de control configurado para permitir la independencia de movimiento de los dedos o grupos de dedos.
Más concretamente, la pluralidad de dedos puede comprender un único pulgar y por lo menos un dedo.
Más concretamente, el pulgar puede tener un motor con unas características de par bajo y alta velocidad, y el dedo puede tener un motor con unas características de par alto y baja velocidad.
De manera alternativa o además, la prótesis puede estar revestida con un recubrimiento de un material aceptable desde el punto...
Reivindicaciones:
1. Prótesis (1) para proporcionar por lo menos un miembro en forma de dedo que puede operarse mecánicamente, teniendo la prótesis (1) por lo menos un dicho miembro en forma de dedo (3) que se extiende en general tangencialmente con respecto a una rueda del engranaje de tornillo sin fin fija (5) en un elemento de soporte de la prótesis, estando el miembro en forma de dedo (3) montado para rotar en torno al eje de la rueda del engranaje de tornillo sin fin (8), comprendiendo el miembro en forma de dedo (3) un motor (7) operable para accionar un tornillo sin fin (13), estando el tornillo sin fin engranado con la rueda del engranaje de tornillo sin fin fija (5) de manera que cuando se pone en funcionamiento el motor (7), durante el uso de la prótesis, el miembro en forma de dedo (3) se mueve alrededor de la rueda del engranaje de tornillo sin fin fija (5), caracterizada porque el tornillo sin fin (13) y el motor (7) se disponen en los lados opuestos del eje de la rueda del engranaje de tornillo sin fin (8) y el tornillo sin fin (13) se dispone por fuera del miembro en forma de dedo (3).
2. Prótesis según la reivindicación 1 en la que el tornillo sin fin se extiende de manera prácticamente perpendicular al miembro en forma de dedo.
3. Prótesis según la reivindicación 1 ó 2 en la que la prótesis comprende adicionalmente un medio de transmisión configurado para acoplar el movimiento del motor al tornillo sin fin.
4. Prótesis según la reivindicación 3 en la que el medio de transmisión se configura de manera que el eje de rotación del tornillo sin fin se inclina hacia el eje de rotación del motor.
5. Prótesis según la reivindicación 4 en la que el eje de rotación del tornillo sin fin se inclina aproximadamente 90 grados hacia el eje de rotación del motor.
6. Prótesis según cualquiera de las reivindicaciones 3 a 5 en la que el medio de transmisión comprende un primer y un segundo engranaje cónico que engranan uno con el otro, estando el primer engranaje cónico configurado para moverse en respuesta al movimiento del motor y estando el segundo engranaje cónico acoplado al tornillo sin fin.
7. Prótesis según cualquiera de las reivindicaciones anteriores en la que sólo una parte de un borde periférico de la rueda del engranaje de tornillo sin fin engrana con el tornillo sin fin durante el uso de la prótesis.
8. Prótesis según la reivindicación 7 en la que la rueda del engranaje de tornillo sin fin tiene un perfil que le permite disponerse respecto al miembro en forma de dedo de manera que una distancia entre el eje de la rueda del engranaje de tornillo sin fin y el miembro en forma de dedo sea inferior a un radio máximo de la rueda del engranaje de tornillo sin fin.
9. Prótesis según la reivindicación 8 en la que el radio máximo está entre el eje de la rueda del engranaje de tornillo sin fin y un punto en un borde periférico de la rueda del engranaje de tornillo sin fin que, durante su uso, engrana con el tornillo sin fin.
10. Prótesis según cualquiera de las reivindicaciones 7 a 9 en la que la rueda del engranaje de tornillo sin fin tiene un perfil más o menos semicircular.
11. Prótesis según la reivindicación 10 en la que un borde periférico curvado del semicírculo se orienta para engranar con el tornillo sin fin.
12. Prótesis según cualquiera de las reivindicaciones anteriores en la que el motor es un motor de corriente continua de imanes permanentes con una relación prácticamente lineal entre el par y la corriente de transmisión.
13. Prótesis según cualquiera de las reivindicaciones anteriores en la que el motor se acopla mediante un eje de salida del mismo a un sistema de caja de engranajes de manera que durante su uso se puedan seleccionar diferentes razones de velocidad de par de salida y de transmisión de entre un rango de relaciones diferentes.
14. Prótesis según cualquiera de las reivindicaciones anteriores en la que la prótesis tiene una pluralidad de dedos cada uno de ellos con por lo menos un miembro en forma de dedo y la prótesis dispone de un medio de control configurado para permitir la independencia de movimiento de los dedos o grupos de dedos.
15. Prótesis según la reivindicación 14 en la que la pluralidad de dedos comprende un único pulgar y por lo menos un dedo, teniendo el pulgar un motor con unas características de par bajo y alta velocidad, y teniendo el dedo un motor con características de par alto y baja velocidad.
Patentes similares o relacionadas:
Dispositivo de cierre con un equipo de ajuste para el giro automático de un elemento de unión de una pieza de cierre hacia una posición de cierre, del 13 de Mayo de 2020, de Fidlock GmbH: Dispositivo de cierre, con al menos una primera y una segunda pieza de cierre , que pueden unirse entre sí para cerrar el dispositivo […]
Rodilla protésica transfemoral semiaccionada, del 3 de Abril de 2019, de THE REGENTS OF THE UNIVERSITY OF CALIFORNIA: Un dispositivo de rodilla protésica semiaccionada , configurado para acoplarse a una extremidad inferior que queda por encima de la rodilla de […]
PRÓTESIS AUTOMÁTICA DE RODILLA, del 4 de Octubre de 2018, de UNIVERSIDAD DE GUADALAJARA: Se ha inventado una prótesis automática de rodilla con movimientos de flexión-extensión y rotación pasiva automática axial, medial y lateral del tipo que comprende primeros […]
PROCEDIMIENTO Y SISTEMA DE REHABILITACIÓN DE UNA EXTREMIDAD PARÉTICA, del 31 de Mayo de 2018, de FUNDACION TECNALIA RESEARCH & INNOVATION: Se proporcionan sistemas generadores para generar un decodificador neuromuscular-a-movimiento a partir de una extremidad sana. El sistema generador […]
Control de dispositivo de extremidad, del 3 de Enero de 2018, de OTTO BOCK HEALTHCARE GMBH: Unidad de control para controlar eléctricamente un dispositivo de extremidad eléctricamente controlable en forma de una extremidad artificial para un ser […]
Prótesis automática para personas con amputación por encima de la rodilla, del 15 de Noviembre de 2017, de Officine Ortopediche Rizzoli S.r.l: Prótesis para personas con una amputación por encima de la rodilla, teniendo dicha prótesis un segmento femoral , que puede estar fijado a una conexión femoral , y un […]
Dispositivo sensitivo de presión aplicable a prótesis mioeléctricas de miembro superior, del 14 de Julio de 2017, de CENTRO ORTOPEDICO TECNOLOGICO S.L.U: 1. Dispositivo sensitivo de presión aplicable a prótesis mioeléctricas de miembro superior: comprendiendo dicha prótesis una mano electromecánica […]
SISTEMA PARA ASISTIR A CAMINAR, del 26 de Mayo de 2017, de TECNIMUSA S.L: Sistema para asistir a caminar a una persona, consistente en un exoesqueleto para adaptarse a la persona que comprende una pluralidad de estructuras […]