CIP-2021 : B25J 18/06 : flexibles.
CIP-2021 › B › B25 › B25J › B25J 18/00 › B25J 18/06[1] › flexibles.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 18/00 Brazos.
B25J 18/06 · flexibles.
CIP2021: Invenciones publicadas en esta sección.
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE.
(28/05/2020). Solicitante/s: ORTEGA CARRILLO, Hernando. Inventor/es: ALCANTARA TALAVERA,Magno, NERI GONZALEZ,Jose Francisco.
Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio de un diseño que permite la aplicación de forma separable de al menos un arreglo de tensores elásticos en al menos una de una pluralidad de ubicaciones disponibles como parte de dichos eslabones. Así, se proporciona un sistema robótico que amortigua las vibraciones y que genera un efecto de soporte dinámico ajustable representable por vectores que depende del requerimiento del usuario aplicable en extremidades robóticas, prótesis, órtesis y/o exoesqueletos.
Tubo hinchable de geometría variable y volumen constante, brazo robotizado y robot.
(22/05/2019) Tubo hinchable de geometría variable y volumen constante, comprendiendo una envoltura hinchable de material flexible impermeable y poseyendo un eje central (A), comprendiendo además el tubo hinchable medios de recuperación de tensión de tracción longitudinal aplicada a la envoltura por la presión interna en esta última, caracterizado por que los medios de recuperación de tensión comprenden pares de un primer y de un segundo medio de enlace inextensible que se extiende en el interior de la envoltura , estando repartidos dichos pares en N semiplanos longitudinales (P11, P12) de la envoltura , extendiéndose cada uno entre el eje central (A) de la envoltura y una línea generatriz respectiva de…
Una herramienta flexible.
(29/07/2015) Una herramienta flexible , que comprende:
una pluralidad de segmentos interconectados movibles relacionados entre sí; y
medios rígidos, que comprenden un medio el cual llena las áreas entre los elementos de la articulación (18a-d, 20) de los segmentos;
en donde el medio es conmutable durante el uso a partir de un primer estado de rigidez relativamente baja en donde el medio se comporta como un fluido hacia un segundo estado de rigidez relativamente alta en donde el medio es rígido y subsecuentemente conmutable a partir del segundo estado de regreso al primer estado;
y en donde el medio actúa en el primer estado…
(19/04/2012) Brazo poliarticulado.
La invención se refiere a un brazo poliarticulado en un plano , que comprende un primer elemento , un segundo elemento y un tercer elemento articulados sucesivamente mediante articulaciones , que definen su dirección longitudinal , en el que el primer elemento y el tercer elemento están articulados entre sí por un vástago mediante dos articulaciones situadas cada una a proximidad de la articulación de cada uno de dichos elementos con el segundo elemento y en dirección perpendicular a la dirección longitudinal los elementos primero y tercero y estando dichas dos…
MÓDULO PARA LA FABRICACIÓN DE ESTRUCTURAS MÓVILES AUTOMATIZADAS Y A UNA ESTRUCTURA MODULAR MÓVIL.
(03/05/2011) Un módulo para la fabricación de estructuras móviles automatizadas que comprende un primer elemento sustancialmente con forma de placa y un segundo elemento sustancialmente con forma de placa que están encarados entre sí y están mutuamente articulados de forma que pueden oscilar mediante la interposición de medios bisagra y medios para activar la oscilación relativa de dichos primer y segundo elementos sustancialmente con forma de placa dichos medios bisagra comprendiendo una bisagra cilíndrica que está provista entre dicho primer elemento sustancialmente con forma de placa y dicho segundo elemento sustancialmente con forma de placa y define un único eje (A) para su oscilación relativa de forma que dicho eje de oscilación (A) esté sustancialmente paralelo…
JUNTA DE UNION DE BARRAS.
(16/07/2007). Ver ilustración. Solicitante/s: UNIVERSIDAD DEL PAIS VASCO-EUSKAL HERRIKO UNIBERTSITATEA. Inventor/es: ANGULO DUQUE,CARLOS, AVILES GONZALEZ,RAFAEL.
Junta de unión de barras con movimiento independiente entre ellas de aplicación en sistemas mecánicos y estructuras adaptativas de geometría variable que permite la unión de hasta seis barras, siendo algunas de ellas barras actuadoras de longitud variable. La junta de unión de barras comprende un cilindro central alrededor del cual giran dos piezas a las que se unen las barras actuadoras, introduciendo dos pares de rotación, y dos piezas en los extremos de dicho cilindro a las que se unen las barras a través de una serie de rótulas, cada una de las cuales introduce un par esférico.
DISPOSITIVO ROBOTICO QUE SE MUEVE CONECTANDO ALTERNATIVAMENTE CADA UNO DE SUS EXTREMOS A ESTACIONES DE ATRAQUE.
(16/04/2005) Un dispositivo de autómata o robot , comprendiendo el dispositivo de robot un cuerpo movible que incorpora, montadas en él, al menos dos partes de acoplamiento separadas , de tal forma que cada parte de acoplamiento incluye medios de conexión de potencia que permiten a la parte de acoplamiento conectarse a otro miembro de acoplamiento, de tal manera que el dispositivo pueda recibir potencia del mismo con el fin de permitir que se produzca el movimiento del miembro de robot por sí mismo, teniendo el dispositivo medios para desplazar dicho cuerpo movible de tal forma que una de las partes de acoplamiento pueda ser acoplada selectivamente a un primer miembro de acoplamiento , siendo entonces…
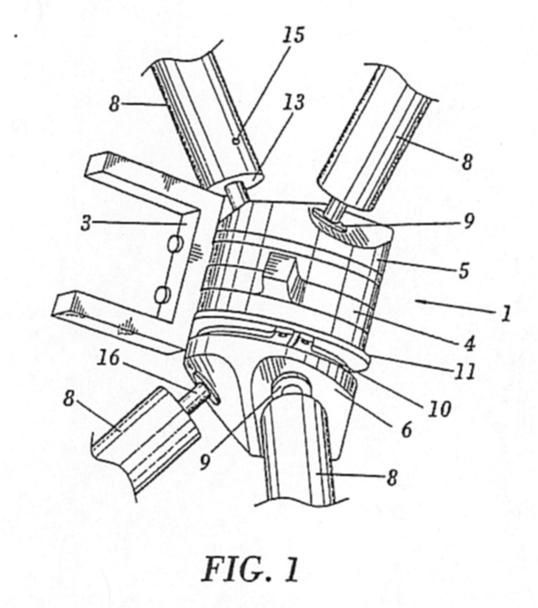
ACOPLAMIENTO, CON RIGIDEZ VARIABLE, PARA HERRAMIENTA DE ROBOT.
(01/12/2000). Ver ilustración. Solicitante/s: CENTRO TECNOLOGICO ROBOTIKER. Inventor/es: APARICIO RODRIGUEZ,JOSE MARIA, IDIGORAS LEIBAR,IGONE, DORRONSORO MENDIGUREN,MIGUEL.
Acoplamiento, con rigidez variable, para herramienta de robot. El Acoplamiento está constituido por un cuerpo tubular de naturaleza elástica, cuyos extremos 0 embocaduras se cierran mediante sendas bridas y para el montaje de la correspondiente herramienta y del brazo del robot, respectivamente, y en cuyo interior se inyecta un fluido, cuya presión puede variarse a voluntad, de tal manera que en los desplazamientos y posicionamientos del brazo del robot, la presión del citado fluido difiera de la aplicada durante las operaciones de trabajo del robot. Este cuerpo tubular se complementa, opcionalmente, con un elemento retenedor envolvente helicoidal que evita las deformaciones excesivas de aquel cuando en el interior de la cámara que constituye el mismo se inyecta aire u otro fluido a presión. Figura 1.
(16/06/1998) LA INVENCION SE REFIERE A UN ROBOT INDUSTRIAL HUECO ESPECIALMENTE ADECUADO PARA TRABAJOS DE ELABORACION TALES COMO SOLDADURAS POR PUNTOS O POR ARCO, HERMETIZACION, PINTURA, ENCOLADO, FRESADO POR LASER, ETC. EL ROBOT CONSTA DE UN BRAZO ROBOT INFERIOR TUBULAR , CUYO EXTREMO INFERIOR SE ENCUENTRA ACOJINADO DE FORMA PIVOTANTE EN UN SOPORTE ROBOT ALREDEDOR DE UN PRIMER EJE PREFERENTEMENTE HORIZONTAL Y ACOJINADO DE FORMA ROTATIVA ALREDEDOR DE UN SEGUNDO EJE (B) QUE COINCIDE CON EL EJE LONGITUDINAL DEL BRAZO . HAY UN BRAZO ROBOT SUPERIOR TUBULAR CONECTADO DE FORMA ARTICULADA AL EXTREMO SUPERIOR DEL BRAZO ROBOT INFERIOR A TRAVES DE UN MIEMBRO DE JUNTA ARTICULADA A MODO DE MANGUITO…
APARATO DE BUSQUEDA Y RECUPERACION DE OBJETOS EXTRAÑOS EN MANOJO.
(01/12/1997) UN APARATO PARA LA LOCALIZACION Y EXTRACCION DE OBJETOS EXTRAÑOS DE UNA GEOMETRIA DIFICIL DE ACCEDER QUE UTILIZA UNA LANCETA FLEXIBLE FORMADO DE SEGMENTOS DE BARRA MANGUERA INDIVIDUALES ATADO EN CABLES PARA DAR UNA ESTRUCTURA QUE ES FLEXIBLE A LO LARGO DE SU LONGITUD Y BASTANTE RIGIDO EN UNA DIRECCION TRANSVERSAL A SU LONGITUD. EXTENDIENDOSE DESDE CANALES DE TRABAJO DE BLOQUE DE BOCA DE LA LANCETA HAY UN PAR DE RECUPERADORES MULTI-DIENTES . UNA CAMARA VIDEOSONDA MINIATURIZADA VA PROVISTA EN EL BLOQUE DE BOCA ENTRE LOS DOS RECUPERADORES . LOS RECUPERADORES ESTAN CONECTADOS CADA UNO A UN CABLE DE FUNCIONAMIENTO , QUE SE EXTIENDE A TRAVES DE LA LANCETA FLEXIBLE A UN CONTROL MANUAL . LA CAMARA…
SISTEMA DE CINTA FLEXIBLE CON GUIA DE CINTA DESLIZANTE.
(16/11/1996) SISTEMA DE CINTA FLEXIBLE CON GUIA DE CINTA DESLIZANTE FIJO A UN AGUJERO MANO DE UN GENERADOR DE VAPOR DE UN CENTRAL DE ENERGIA NUCLEAR POR MEDIO DE UN FLANCO DE UN MODULO DE INCLINACION HASTA UN PLATAFORMA DE SOPORTE Y ESTA FIJADO A LA PLATAFORMA POR UN PIVOTE DE TAL MODO QUE EL RAIL ES LIBRE DE ROTAR CON EL MODULO DE INCLINACION . UN MOTOR DE TRACCION DE INCLINACION VA FIJADO AL MODULO DE INCLINACION . UNA CINTA FLEXIBLE SE EXTIENDE DENTRO DEL RAIL PARA EXTENDERSE A LO LARGO DE UNA ZAPATA GUIA DE CINTA . LA ZAPATA GUIA DE CINTA DESVIA LA CINTA DEL RAIL AL HUECO DEL TUBO DEL GENERADOR DE VAPOR.…
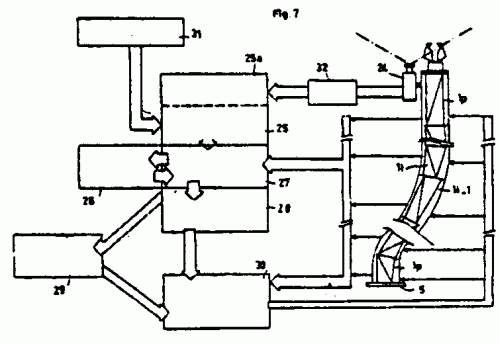
ROBOT REDUNDANTE DE TIPO MODULAR.
(01/05/1989). Ver ilustración. Solicitante/s: LOGABEX SOCIETE A RESPONSABILITE LIMITEE. Inventor/es: DURAND, DIDIER, CH\'HAYDER, AMEUR, DIAZ, CONSTANTINO.
LA INVENCION SE REFIERE A UN ROBOT REDUNDANTE DE TIPO MODULAR, QUE PERMITE DESPLAZAR UN TERMINAL DE UNA SITUACION INICIAL HACIA UNA SITUACION FINAL. ESTE ROBOT COMPRENDE UNA SUCESION DE MODULOS, CADA UNO CONSTITUIDO POR UNA PLATAFORMA Y POR SEIS ACCIONADORES DISPUESTOS SEGUN UNA ARQUITECTURA ANGULADA CERRADA, UN SISTEMA DE CAPTADORES ASOCIADO A CADA MODULO, Y UNOS MEDIOS DE MANDO QUE PERMITEN DETERMINAR UNA CONFIGURACION DEL ROBOT QUE CORRESPONDE A LA SITUACION FINAL A ALCANZAR POR EL TERMINAL Y PARA CONDICIONAR LOS ACCIONADORES PARA DISPONER LOS DIVERSOS MODULOS SEGUN ESTA CONFIGURACION. ESTOS MEDIOS DE MANDO COMPRENDEN EN PARTICULAR MEDIOS DE ALMACENADO DE LOS ESPACIOS ACCESIBLES PARA CADA PLATAFORMA, MEDIOS DE TOMA DE LA SITUACION FINAL A ALCANZAR, MEDIOS DE CALCULO DE LA CONFIGURACION DEL ROBOT, Y MEDIOS DE CALCULO DE ESTADOS DE LOS ACCIONADORES Y UNA INTERFAZ DE CONDICIONADO DE ESTOS ULTIMOS.
{kind=link}
{kind=link}
{kind=link}