CIP-2021 : B25J 9/10 : caracterizado por los medios para regular la posición de los elementos del manipulador.
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/10[1] › caracterizado por los medios para regular la posición de los elementos del manipulador.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/10 · caracterizado por los medios para regular la posición de los elementos del manipulador.
CIP2021: Invenciones publicadas en esta sección.
ROBOT CON ANILLOS DE SOPORTE FIJADOS SOBRE UNA CAJA DE ENGRANAJES PARA FIJACION DE LEVAS DE CONTROL.
(16/06/2007). Solicitante/s: KUKA ROBOTER GMBH. Inventor/es: KARLINGER, STEFAN.
Robot de varios ejes con al menos un engranaje asociado a un eje del robot, con una caja de engranajes con bandas de retención para fijar levas de control para controlar el ángulo de giro del eje del robot, caracterizado porque las bandas de retención están configuradas esencialmente en forma de arco de circunferencia con un perímetro interior aproximadamente equivalente al perímetro exterior de la caja del engranajes , y porque las bandas de retención se pueden tensar entre sí por el lado frontal para su fijación a la caja de engranajes.
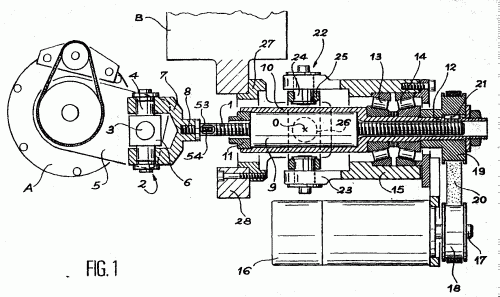
SISTEMA DE ACCIONAMIENTO POR CORREA PARA UNA HERRAMIENTA.
(01/05/2007) Sistema de accionamiento para una herramienta para el mecanizado, el tratamiento o la manipulación en serie de piezas de trabajo con un brazo de accionamiento montado en una fijación , de manera que se puede desplazar a lo largo de un eje lineal, en cuyo extremo la herramienta está apoyada con posibilidad de basculación alrededor de un eje de giro que se extiende transversalmente con respecto al eje lineal, una unidad de accionamiento lineal para el desplazamiento del brazo de accionamiento en una dirección longitudinal con respecto a la fijación , y un dispositivo de accionamiento para el giro alrededor del eje de giro de la herramienta desplazable en traslación por la…
DISPOSITIVO PARA EL DESPLAZAMIENTO RELATIVO DE DOS ELEMENTOS.
(01/11/2006) Un dispositivo para el desplazamiento relativo de dos elementos que comprende un arreglo de enlace (5q; 5r) y un arreglo de desplazamiento (6q; 6r) conectado con el arreglo de enlace (5q; 5r), estando proporcionado el arreglo de desplazamiento (6q; 6r) entre el arreglo de enlace (5q; 5r) y el primero (1q; 1r) de los elementos mientras el arreglo de enlace (5q; 5r) está proporcionado entre el arreglo de desplazamiento y el segundo (2q; 2r) de los elementos, estando formado el segundo elemento por el elemento portador ó funcional (3q; 3r), el arreglo de enlace (5q; 5r) que comprende por lo menos tres enlaces (9q, 14q; 94, 14r) está contactado de manera giratoria a través de las juntas en relación con el arreglo de desplazamiento (6q; 6r) y el segundo elemento (2q; 2r), estando conectados los citados enlaces (9q,…
PROCEDIMIENTO PARA LA LIMPIEZA DE UNA PARTE COMPONENTE Y DISPOSITIVO DE LIMPIEZA APROPIADO PARA ELLO.
(01/09/2006) Procedimiento para la limpieza de por lo menos una superficie de una parte componente por el empleo de un dispositivo de limpieza ; en este caso, la superficie de la parte componente es limpiada por medio de un cabezal limpiador , que puede ser desplazado por un dispositivo de posicionamiento , con la aplicación de una fuerza de apriete del cabezal limpiador sobre la parte componente; a este efecto, el dispositivo de posicionamiento tiene un sistema de posicionamiento basto así como un sistema de posicionamiento fino , siendo el cabezal limpiador desplazado, por medio del sistema de posicionamiento fino , en por lo menos una dirección de desplazamiento y de una manera controlada por la fuerza; procedimiento éste que está caracterizado porque…
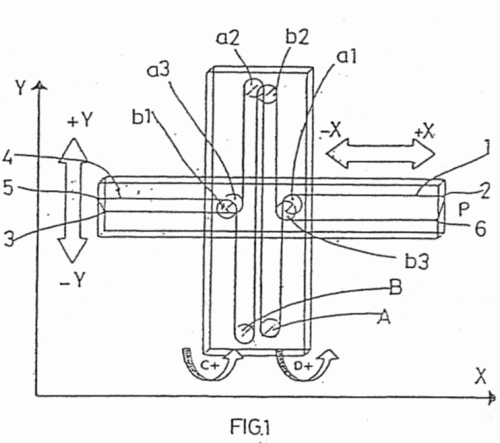
MECANISMO DE DESPLAZAMIENTO CARTESIANO, CON TRANSMISION UNICA Y DOBLE ACCIONAMIENTO.
(01/07/2006). Ver ilustración. Solicitante/s: SANCHEZ SOLER,JOSE MIGUEL ABAD MARTIN-CAMUAS,MIGUEL ANGEL PAYA VICENS,ARTEMIO. Inventor/es: SANCHEZ SOLER,JOSE MIGUEL, ABAD MARTIN-CAMUAS,MIGUEL ANGEL, PAYA VICENS,ARTEMIO.
Mecanismo de desplazamiento cartesiano, con transmisión única y doble accionamiento. Consistente en dos elementos de accionamiento acoplados a una transmisión única de poleas, disponiendo de dos ejes cartesianos, uno fijo y otro desplazable, ensamblado transversalmente con el anterior y que se desplaza de forma que los extremos alcancen cualquier punto del plano resultante, desplazamiento regulado mediante el giro al unísono, en el mismo sentido o en sentido contrario, de los accionadores, para desplazamiento paralelo a los ejes, así como el movimiento de uno y la detención del otro y viceversa, para desplazamiento diagonal, siendo la propia transmisión un elemento integrante para la conservación de la rigidez geométrica del conjunto y siendo el propio eje móvil parte activa de la transmisión.
PREPARACION Y APLICACION DE MUSCULOS ARTIFICIALES, ACTUADORES Y DISPOSITIVOS POLIMERICOS PARA DESPLAZAMIENTOS LONGITUDINALES Y DE VALVULA.
(01/04/2006) Esta invención describe un dispositivo capaz de transformar los movimientos angulares, característicos de los músculos artificiales basados en polímeros conductores, en movimientos longitudinales lineales, bajo el estímulo de una corriente eléctrica. Como en los músculos artificiales constituyentes estos dispositivos son totalmente poliméricos y están formados por bicapas, o tricapas de polímeros conductores electrónicos intrínsecos y de polímeros no conductores, adherentes y flexibles. El movimiento lineal del dispositivo, se consigue por combinación de dos o más elementos básicos: bicapas o tricapas, lo que da lugar, así mismo, a dispositivos…
DISPOSITIVO DE TRANSFERENCIA DE OBJETOS INDUSTRIALES ENTRE DOS POSICIONES.
(01/04/2005) Dispositivo de transferencia de por lo menos un objeto de una primera posición hacia una segunda posición, que comprende: - una estructura móvil , portadora de un brazo de manipulación equipado con por lo menos un órgano de prensión y de posicionamiento de por lo menos un objeto ; - una unidad de accionamiento de la estructura móvil, que permite, por una parte, un movimiento alternativo de retracción y de extensión del brazo de manipulación, para llevar al órgano de prensión y de posicionamiento de una primera posición de extensión, en la que es apto para tomar un objeto situado en su primera posición, a una posición retraída, y luego a una posición de extensión, en la que es apto para…
(01/10/2004) Método para la transferencia rápida de un objeto de trabajo en las direcciones tanto horizontal como vertical usando una unidad de robot que tiene un mecanismo de sujeción desde una instalación de trabajo a otra , pesando el objeto de trabajo entre un kilo y cuarenta kilos y siendo la transferencia en la dirección horizontal al menos de un metro pero menos de diez metros y efectuándose al menos parcialmente a lo largo de una unidad de viga que se extiende sensiblemente en sentido horizontal estando colocada entre dichas estaciones de trabajo , y estando dispuesto el mecanismo de sujeción de tal modo que, al menos en una primera situación de extremo (E1), a lo largo…
ELEMENTO DE UNION DE UN GATO DE TUERCA Y TORNILLO Y SU APLICACION EN UN BRAZO DE ROBOT.
(01/07/2004). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE COMPAGNIE GENERALE DES MATIERES NUCLEAIRES. Inventor/es: JOUAN DE KERVENOAEL, TANGUY.
Elemento de unión entre una primera pieza (A) y una segunda pieza (B), que comprende un gato de tuerca y de tornillo acoplado a través de la tuerca , un cuerpo de gato en el que se sostiene la tuerca mediante unos cojinetes con libertad de girar, un motor capacitado para producir rotaciones entre el tornillo y la tuerca y unos primeros y segundos medios de empalme entre la primera pieza y el tornillo y entre la segunda pieza y la tuerca, caracterizado porque los primeros y segundos medios de empalme consisten en dos cardanes, admitiendo los cardanes cada uno dos ejes de rotación perpendiculares al tornillo y a la tuerca, y los ejes de rotación de uno de los cardanes convergen hacia el centro de la tuerca.
SISTEMA DE POSICIONAMIENTO PARA LA OPERACION DE PRODUCCION.
(01/04/2004) UN PROCEDIMIENTO POSICIONADOR PARA UN SISTEMA DE FABRICACION PARA POSICIONAR LA SITUACION DE UNA CABEZA POSICIONADORA CON RELACION A UN OBJETO DE TRABAJO, CONSISTE EN UN CUERPO POSICIONADOR , P.EJ. UN ROBOT O UNA MAQUINA HERRAMIENTA, UNA UNIDAD POSICIONADORA DE CONTROL PARA EL CUERPO POSICIONADOR Y UN SISTEMA DE DATOS DE CONTROL PARA LA UNIDAD POSICIONADORA DE CONTROL , EN DONDE EL SISTEMA DE DATOS DE CONTROL COMUNICA CON UN SISTEMA TRIDIMENSIONAL MEDIDOR DE LA LOCALIZACION , QUE COMPRENDE AL MENOS UN DISPOSITIVO GRABADOR QUE DETERMINA Y AJUSTA LA SITUACION DE LA CABEZA POSICIONADORA EN EL ESPACIO, Y UN DISPOSITIVO POSICIONADOR PARA UN SISTEMA DE FABRICACION, PARA POSICIONAR LA SITUACION DE UNA CABEZA POSICIONADORA CON RELACION A UN OBJETO DE TRABAJO, COMPRENDE UN CUERPO POSICIONADOR , P.EJ. UN ROBOT O UNA MAQUINA HERRAMIENTA,…
MAQUINA ROBOTIZADA PROVISTA DE AL MENOS UN BRAZO CON PATOGRAFO SIMETRICO, POR EJEMPLO PARA LA RECOGIDA DE FRUTA O PARA LA CLASIFICACION DE OBJETOS DIVERSOS.
(16/11/2003) Máquina robotizada, por ejemplo para la recogida de frutas o para la clasificación de objetos diversos, que comprende un manipulador de coordenadas esféricas, con al menos tres grados de libertad: dos rotaciones perpendiculares y concurrentes Theta y Phi, y una traslación Rho de su prensor hacia el objeto que debe ser agarrado, de tal modo que el eje de traslación (A3) de la cabeza de prensión (20a) de este prensor se interseca siempre con los dos ejes Theta (A1) y Phi (A2) de las rotaciones en un punto central (I), estando provisto este manipulador de coordenadas esféricas de un sistema de visión artificial para la localización de los objetos por agarrar, sistema cuyo centro óptico está situado exactamente en dicho punto central (I), incluyendo dicho manipulador de coordenadas esféricas, un brazo de manipulación…
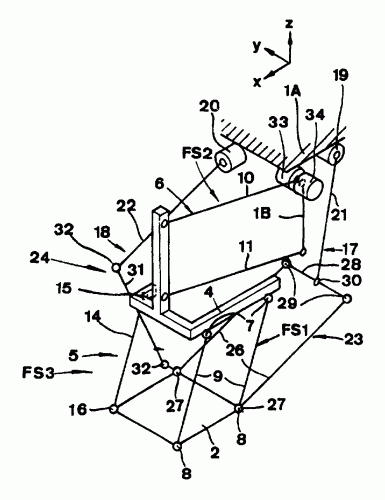
UN DISPOSITIVO PARA MOVIMIENTO RELATIVO DE DOS ELEMENTOS.
(01/04/2003). Ver ilustración. Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: BROGAARDH, TORGNY.
UN DISPOSITIVO PARA MOVIMIENTO RELATIVO DE DOS ELEMENTOS COMPRENDE DOS DISPOSICIONES DE ENLACES ACOPLADAS EN SERIE MEDIANTE UNA DISPOSICION DE CONEXION . UNA PRIMERA DISPOSICION DE ENLACES COMPRENDE AL MENOS TRES ENLACES QUE SON SUSTANCIALMENTE IGUALES EN LONGITUD Y PARALELOS, ESTANDO DICHOS ENLACES POSICIONADOS EN UNA RELACION SUSTANCIALMENTE TRIANGULAR VISTA A LO LARGO DE LA DIRECCION LONGITUDINAL DE LOS ENLACES, ENTRE LA DISPOSICION DE CONEXION Y EL ELEMENTO . LA SEGUNDA DISPOSICION COMPRENDE AL MENOS UN PARALELOGRAMO QUE ACTUA ENTRE LA DISPOSICION DE CONEXION Y EL ELEMENTO . LA PRIMERA Y LA SEGUNDA DISPOSICION DE APLICACION DE FUERZA ESTAN CONCEBIDAS PARA HACER QUE LA PRIMERA DISPOSICION DE ENLACES 85) PIVOTE. UNA TERCERA DISPOSICION DE APLICACION DE FUERZA ESTA CONCEBIDA PARA HACER QUE LA SEGUNDA DISPOSICION DE ENLACES PIVOTE.
DISPOSITIVO PARA EL MOVIMIENTO DE UN CUERPO EN EL ESPACIO.
(01/11/2002). Solicitante/s: VEREIN DEUTSCHER WERKZEUGMASCHINENFABRIKEN E.V. (VDW). Inventor/es: PRITSCHOW, GUNTER, PROF.-DR.ING.DR.H.C., WURST, KARL-HEINZ, DR.-ING.
EL DISPOSITIVO SIRVE PARA EL MOVIMIENTO DE UN CUERPO (K) EN FORMA DE BARRA EN EL ESPACIO, ESTANDO UNIDO DE FORMA ARTICULADA CON BRAZOS (VA) DE UNION. TIENEN RESPECTIVAMENTE AL MENOS DOS GRADOS DE LIBERTAD Y ESTAN PREVISTOS DE FORMA RESPECTIVA CON AL MENOS UN ACCIONAMIENTO (A) PARA CONTROL DE UN GRADO DE LIBERTAD ACTIVO. UNO DE LOS PUNTOS (P) EXTREMOS DEL CUERPO (K) DE BARRA DETERMINA LA POSICION EN EL ESPACIO Y EL OTRO PUNTO (P') EXTREMO EN UNION CON EL PRIMER PUNTO (P) EXTREMO DETERMINA LA ORIENTACION DEL CUERPO DE BARRA. PARA EL AJUSTE DE AMBOS PUNTOS (P,P') EXTREMOS SIRVEN LOS BRAZOS (VA) DE UNION.
UN DISPOSITIVO DE UN ELEMENTO DE TRABAJO CON DOS GRADOS DE MOVILIDAD.
(01/07/2002). Solicitante/s: CONSEJO SUPERIOR INVESTIGACIONES CIENTIFICAS. Inventor/es: AKINFIEV,TEODOR, GONZALEZ DE SANTOS,PABLO, ARMADA,MANUEL, JIMENEZ,M. ANTONIA, UQUILLAS,MAURICIO, PRIETO,MANUEL.
Un dispositivo de un elemento de trabajo con dos grados de movilidad. Un elemento de trabajo con dos grados de movilidad, el cual, con la ayuda de dos motores consigue mover dos eslabones móviles, uno de ellos actuando sobre el elemento de trabajo, este es un método que se distingue por la acción simultanea sobre un elemento de trabajo con la ayuda de otro eslabón móvil. La conducción de un elemento de trabajo con dos grados de movilidad que tiene dos motores uno de los cuales esta ubicado en la base y conectado cinemáticamente con un extremo del primer eslabón móvil localizado en la base con posibilidad de movimiento y otro motor conectado cinemáticamente con un extremo del segundo eslabón móvil, y el elemento de trabajo que está conectado con el otro extremo del segundo eslabón móvil.
(01/04/2000). Solicitante/s: EISSFELLER, ROMAN. Inventor/es: EISSFELLER, ROMAN.
EL ROBOT INDUSTRIAL MUESTRA UN BRAZO DE TRABAJO MOVIL PARA EL MANEJO DE PIEZAS DE TRABAJO Y UN MECANISMO QUE MUEVE EL BRAZO DE TRABAJO. EL MECANISMO SE PONE A DISPOSICION A TRAVES DE TRES EQUIPOS DE MOVIMIENTO LINEAL, POR MEDIO DE LOS CUALES EL BRAZO DE TRABAJO ES MOVIL EN TRES DIRECCIONES ALINEADAS DE FORMA ORTOGONAL UNA CON RESPECTO A OTRA. EL ROBOT INDUSTRIAL ES APROPIADO ESPECIALMENTE EN UNA FORMA CONSTRUCTIVA LIGERA CON CHAPAS DE ALUMINIO Y/O DE CERO CONOCIDAS.
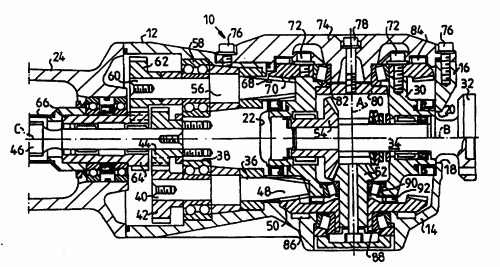
UNIDAD DE ACCIONAMIENTO PARA UN ROBOT INDUSTRIAL.
(16/03/2000). Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: KULLBORG, OVE.
UNA UNIDAD DE ARRASTRE COMPRENDE UN MOTOR ELECTRICO Y UNA UNIDAD DE TRANSMISION DE REDUCCION PENSADA PREFERIBLEMENTE PARA UN ROBOT INDUSTRIAL. UNA CAJA DE TRANSMISIONES SOSTIENE UN MOTOR CON UN ARBOL QUE SE EXTIENDE EN LA CAJA DE VELOCIDADES Y CUENTA CON UN PIÑON CONICO . UN EJE INTERMEDIO ESTA APOYADO EN DOS SOPORTES . EN EL ARBOL INTERMEDIO ESTA FIJADA UNA TRANSMISION CONICA MAYOR Y ENTRE LOS SOPORTES UNA TRANSMISION CILINDRICA MENOR . UN ARBOL DE SALIDA QUE CUENTA CON UNA TRANSMISION CILINDRICA MAYOR ESTA SOPORTADA ROTATORIAMENTE Y EN PARALELO EN EL ARBOL INTERMEDIO . LAS TRANSMISIONES ESTAN DISPUESTAS DE TAL FORMA QUE EL PIÑON CONICO ESTA UNIDO CON LA TRANSMISION CONICA MAYOR Y LA TRANSMISION CILINDRICA MENOR ESTA UNIDA CON LA TRANSMISION CILINDRICA MAYOR . EL ARBOL DEL MOTOR ESTA ORIENTADO APROXIMADAMENTE EN PERPENDICULAR CON EL ARBOL DE SALIDA.
UNIDAD DE MUÑECA PARA ROBOT INDUSTRIAL.
(01/12/1999). Ver ilustración. Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: LARSSON, JAN, DANIELSSON, STEFAN, GEPERTZ, JAN.
LA INVENCION SE REFIERE A UNA UNIDAD ARTICULADA PARA UN ROBOT INDUSTRIAL QUE CONSTA DE UN ALOJAMIENTO DE LA UNIDAD ARTICULADA DISEÑADO PARA QUEDAR FIJADO DE FORMA DESMONTABLE AL EXTREMO DISTAL DEL BRAZO DE UN ROBOT . EL ALOJAMIENTO DE LA UNIDAD ARTICULADA , QUE TIENE DOS BRAZOS DE HORQUILLA , SOPORTA UN ALOJAMIENTO DE INCLINABLE MONTADO DE FORMA PIVOTANTE , QUE A SU VEZ SOPORTA UN PLATAFORMA GIRATORIA MONTADA DE FORMA ROTATIVA SOBRE LA QUE SE PUEDE MONTAR UN ELEMENTO EXTERNO. EL ALOJAMIENTO INCLINABLE SE ENCUENTRA CONFINADO DE FORMA POSITIVA ENTRE EL BRAZO DE HORQUILLA PARA IMPEDIR ASI QUE LAS FUERZAS REACTIVAS DERIVADAS DE LOS ENGRANAJES PRESENTES EN EL ALOJAMIENTO FUERCEN A LOS BRAZOS DE HORQUILLA A SEPARARSE.
(16/04/1999). Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: TELLDEN, LEIF.
LA INVENCION SE REFIERE A UN ROBOT INDUSTRIAL CON DOS BRAZOS DE ROBOT INFERIORES DIRIGIDOS HACIA ARRIBA DESDE UN PIE DE ROBOT FIJO , ESTANDO ESTOS EN SUS EXTREMOS INFERIORES PIVOTALMENTE ARTICULADO EN EL PIE , ALREDEDOR DE EJES HORIZONTALES (A1,A2) Y ESTANDO INTERCONECTADAS EN SUS EXTREMOS SUPERIORES PIVOTALMENTE MEDIANTE UN YUGO , Y DE TAL MANERA QUE SE FORMA UNA UNION DE CUATRO BARRAS. LA UNION ESTA PROVISTA CON UNA PRIMERA UNIDAD DIRECCIONAL . UN BRAZO ROBOT SUPERIOR SE ENCUENTRA ARTICULADO ALREDEDOR DE UN QUINTO EJE (D) EN UN ELEMENTO DE FIJACION SOPORTADO POR UN YUGO , Y QUE ESTA ROTATORIAMENTE ARTICULADO ALREDEDOR DE UN SEXTO EJE (C). EL BRAZO ROBOT SUPERIOR Y SU ELEMENTO FIJADOR ESTAN PROVISTOS DE UNA SEGUNDA Y TERCERA UNIDAD DIRECCIONAL (24 Y 26) RESPECTIVAMENTE.
UNIDAD DE MUÑON ROBOTICO INDUSTRIAL.
(16/03/1999) LA INVENCION SE REFIERE A UNA UNIDAD ARTICULADA PARA UN ROBOT INDUSTRIAL QUE CONSTA DE UN ALOJAMIENTO DE LA UNIDAD ARTICULADA DISEÑADO PARA QUEDAR FIJADO DE FORMA DESMONTABLE AL EXTREMO DISTAL DEL BRAZO DE UN ROBOT . EN EL ALOJAMIENTO DE LA UNIDAD ARTICULADA HAY MONTADOS DE FORMA ROTATIVA UN PRIMER Y UN SEGUNDO EJES DE ACCIONAMIENTO SECUNDARIOS , PREFERENTEMENTE PARALELOS, SOBRE CUYOS EXTREMOS DE ENTRADA HAY MONTADOS UNOS ENGRANAJES PREFERENTEMENTE CILINDRICOS PARA ACOPLARSE A UN ENGRANAJE DE ACCIONAMIENTO CILINDRICO CORRESPONDIENTE QUE HAY SOBRE UN EJE DE ACCIONAMIENTO PRIMARIO CORRESPONDIENTE DEL BRAZO DEL ROBOT . VISTO DESDE UNA PROYECCION FINAL, LOS ENGRANAJES Y LOS ENGRANAJES DE ACCIONAMIENTO SE ENCUENTRAN COLOCADOS DE TAL MODO QUE UN LINEA IMAGINARIA (L), QUE…
ROBOT INDUSTRIAL, PARTICULARMENTE PARA MOVER PIEZAS DE UNA PRENSA A OTRA, EN UNA LINEA DE PRENSAS.
(01/01/1998). Solicitante/s: COMAU S.P.A.. Inventor/es: MAULETTI, ENRICO.
UN ROBOT INDUSTRIAL, ESPECIALMENTE PARA USO COMO UN ROBOT ENTRE PRENSAS, COMPRENDE UN PAR DE BRAZOS ROTATORIOS, ALREDEDOR DE DOS EJES (I, II), PARALELOS ENTRE SI, Y ESPACIADOS UNO DE OTRO, SOBRE LOS CUALES SE ARTICULAN DOS ANTEBRAZOS . LOS EXTREMOS OPUESTOS DE LOS ANTEBRAZOS ESTAN MUTUAMENTE ARTICULADOS ALREDEDOR DE UN EJE COMUN , Y UNO DE ESTOS ANTEBRAZOS SOPORTA ROTATORIAMENTE UN MUÑON ALREDEDOR DE UN TERCER EJE (III) PARALELO A LOS CITADOS EJES PRIMERO Y SEGUNDO (I, II).
DISPOSITIVO DE MANIPULACION.
(01/12/1997) SE DA A CONOCER UN DISPOSITIVO DE MANIPULACION, QUE ES UTILIZABLE ESPECIALMENTE COMO DISPOSITIVO DE CONMUTACION DE PLACAS ESTIBADORAS, CON UN ARMAZON DE MAQUINA Y CON UN BRAZO SALIENTE MOVIL EN DIRECCION VERTICAL Y EN DIRECCION HORIZONTAL, EN DONDE SE HA PREVISTO UN ELEMENTO DE ACOPLAMIENTO PARA LA COLOCACION DE UN EQUIPO DE AGARRE. EL BRAZO SALIENTE MUESTRA UNA PRIMERA PALANCA (S1) OSCILANTE, QUE ESTA APOYADA EN EL ARMAZON DE LA MAQUINA Y ACCIONADA DE FORMA GIRATORIA ALREDEDOR DE UN EJE DE GIRO HORIZONTAL. EN SU EXTREMO LIBRE SE DISPONE DE UNA SEGUNDA PALANCA (S2) OSCILANTE GIRATORIA Y ACOPLADA DE MODO FORZADO CON LA PRIMERA PALANCA (S1) OSCILANTE…
(01/11/1997). Solicitante/s: APPLIED MATERIALS, INC.. Inventor/es: GRUNES, HOWARD.
SE DESCRIBE UN MONTAJE ROBOT QUE INCLUYE UN CUBO CENTRAL ,CON DOS BRAZOS DISPUESTOS PARA UNA ROTACION INDEPENDIENTE SOBRE EL CUBO. DOS TRANSPORTADORES ORIENTADOS 180 S,EN DIRECCIONES OPUESTAS PARA EXTENDER UNO DE LOS TRANSPORTADORES RADIALMENTE DESDE EL CUBO CENTRAL, Y PARA ROTAR LOS BRAZOS EN LA MISMA DIRECCION Y ASI EFECTUAR LA ROTACION DE LOS TRANSPORTADORES.
ROBOT DE CENTRO DE MOVIMIENTO REMOTO MEJORADO PARA CIRUGIA.
(01/08/1997) UN APARATO USADOS PARA AYUDAR UN CIRUJANO EN CIRUGIA SE DIVIDE EN DOS PARTE PROXIMA Y DISTANTE. EL APARATO TIENE UN NUMERO DE ENLACES RIGIDOS QUE GIRAN ALREDEDOR DE PIVOTES (A UN INSTRUMENTO QUIRURGICO, EN UN PUNTO DE TRABAJO (CMOT) PROXIMO A UN PACIENTE PERO ALEJADO DEL PACIENTE. LOS ENLACES COOPERAN DE MANERA PARA MOVER EL MANIPULADOR SOBRE UN CENTRO DE MOVIMIENTO (CMOT) CON GRADOS DESACOPLADOS ORTOGONALMENTE DE LIBERTAD RESULTA EN EL PUNTO DE TRABAJO. LA PARTE PROXIMA DEL APARATO ESTA FIJADA AJUSTABLEMENTE A UN OBJETO FIJO, COMO UNA MESA DE OPERACION , MIENTRAS QUE LA PARTE DISTANTE DEL APARATO SUJETA EL INSTRUMENTO . CIERTOS ENLACES QUE PUEDEN AJUSTARSE EN LONGITUD, MUEVEN LA PARTE DISTANTE RESPECTO DE LA PARTE PROXIMA DEL APARATO. DE ESTA MANERA, EL PUNTO DE TRABAJO DEL MANIPULADOR Y EL RADIO DE TRABAJO SE CAMBIAN SIN MOVER LA PARTE PROXIMA.…
ROBOT INDUSTRIAL CON UNIDADES DE ENGRANAJE REDUCTOR INTEGRADAS.
(01/07/1997). Solicitante/s: COMAU S.P.A.. Inventor/es: MAULETTI, ENRICO.
SE PROPORCIONA UN ROBOT INDUSTRIAL CON UNA PLURALIDAD DE ELEMENTOS ARTICULADOS UNOS A OTROS, CUYA ROTACION SE ACCIONA POR RESPECTIVOS MOTORES ELECTRICOS MEDIANTE UNIDADES DE ENGRANAJES REDUCTORES, QUE ESTAN INTEGRADAS EN LA ESTRUCTURA DE ESTOS ELEMENTOS.
(01/05/1997) SE PRESENTA UN ROBOT DE BRAZOS EN PARTICULAR PARA LA DESCARGA DE PIEZAS DE TRABAJO, A MODO DE EJEMPLO PIEZAS DE FUNDICION DE INYECCION, ESTANDO EQUIPADO EL ROBOT CON UN BRAZO Y UN GANCHO UNIDO CON ESTE BRAZO . EL BRAZO ESTA UNIDO CON UNA TUERCA ROTATIVA ESFERICA, QUE SE ENCUENTRA MONTADA A PARTIR DE UNA PIEZA INTERNA Y DE UNA PIEZA EXTERIOR, DONDE UN HUSILLO GIRATORIO ESFERICO SE ENCUENTRA EN EL INTERIOR DE LA TUERCA ROTATIVA A LO LARGO DE SU EJE LONGITUDINAL. UNO DE LOS EXTREMOS DEL HUSILLO ESTA UNIDO CON UN BLOQUE DE SUJECION, MIENTRAS QUE EL OTRO EXTREMO DEL HUSILLO DISPONE DE DOS ESTRIAS INSERTADAS, EN FORMA DE 2 HASTA 6 SEMICIRCULOS. LA PIEZA INTERIOR Y LA PIEZA EXTERIOR DE LA TUERCA ROTATIVA ESFERICA ESTAN UNIDAS UNA CON OTRA DE TAL MODO, QUE LAS MARCHAS QUE SE ENCUENTRAN ENTRE ELLAS…
(01/05/1997). Solicitante/s: COMAU S.P.A.. Inventor/es: MAULETTI, ENRICO.
SE DESCRIBE UN ROBOT INDUSTRIAL CON NUEVA CONFIGURACION, INCLUYENDO UN BRAZO ROTATORIAMENTE MONTADO ALREDEDOR DE UN PRIMER EJE VERTICAL, SOBRE UN CUERPO FIJO , UN SEGUNDO CUERPO ROTATORIAMENTE MONTADO ALREDEDOR DE UN SEGUNDO EJE VERTICAL, POR DEBAJO DEL CITADO BRAZO , UNA ARTICULACION EN FORMA DE PARALELOGRAMO, ROTATORIAMENTE MONTADA ALREDEDOR DE UN TERCER EJE HORIZONTAL, SOBRE EL SEGUNDO CUERPO , Y UN MUÑON LLEVADO POR LA ARTICULACION EN FORMA DE PARALELOGRAMO, Y ARTICULADA ALREDEDOR DE DOS EJES MUTUAMENTE ORTOGONALES.
DISPOSITIVO PARA MANIPULACION DE OBJETOS.
(16/04/1997). Solicitante/s: STADELE, BERTA. Inventor/es: STADELE, ERHARD.
EN UN DISPOSITIVO PARA LA MANIPULACION DE OBJETOS CON AL MENOS UNA UNIDAD DE AGARRE, QUE ESTA CONECTADA POR MEDIO DE AL MENOS UN BRAZO A UN MECANISMO MOTRIZ Y A UN MOTOR DE ACCIONAMIENTO, ESTA PROVISTO CON AL MENOS UN EJE HUECO EN EL BRAZO, SIENDO TRANSMISIBLE EL MOVIMIENTO DE ROTACION DEL EJE A UN EJE SUBSECUENTE. EL EJE HUECO ENGRANA POR MEDIO DE ASPILLERAMIENTOS DENTRO DE CAVIDADES DE UNA UNIDAD DE ACOPLAMIENTO, TENIENDO LA UNIDAD DE ACOPLAMIENTO UN DENTADO HELICOIDAL EN SU OTRO EXTREMO.
ROBOT ACOPLADO MAGNETICAMENTE DE DOS EJES.
(16/10/1996). Solicitante/s: APPLIED MATERIALS, INC.. Inventor/es: LOWRANCE, ROBERT B.
UN ROBOT QUE TIENE UN PAR DE ACOPLAMIENTOS MAGNETICOS QUE ACOPLA CADA UNO UN MOTOR EN UNA PRIMERA CAMARA CILINDRICA A UN ANILLO CILINDRICO ASOCIADO SEPARADO CERCA DE LA PARED CILINDRICA DE DICHA PRIMERA CAMARA . EL ROBOT INCLUYE UN MECANISMO PARA CONVERTIR LA ROTACION DE CADA UNO DE ESTOS ANILLOS EN MOVIMIENTOS SEPARADOS DEL ROBOT. EN LA VERSION PREFERIDA, ESTOS MOVIMIENTOS SEPARADOS SON RADIALES Y ROTACIONALES. TAL CONSTRUCCION PERMITE REDUCIR LA CANTIDAD DE PRODUCCION DE PARTICULAS POR TAL ROBOT.
MANIPULADOR DE VARIOS EJES.
(01/08/1996). Solicitante/s: KUKA ROBOTER GMBH. Inventor/es: ZIMMER, ERNST.
LA INVENCION SE REFIERE A UN MANIPULADOR DE VARIOS EJES, CON UN BASTIDOR Y UN PLATO HORIZONTAL ACCIONADO Y DISPUESTO SOBRE EL MISMO EN TORNO A UN EJE BASICO GIRATORIO . EL BASTIDOR PRESENTA UNA COLUMNA DE APOYO CENTRAL, CONCEBIDA COMO APOYO DEL PAR Y DEL RODAMIENTO DEL PLATO HORIZONTAL . EL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SE HA DISPUESTO ESENCIALMENTE A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL , EN EL QUE EL MOTOR ESTA SITUADO SOBRE EL PLATO HORIZONTAL , Y LA PARTE DEL ACCIONAMIENTO DE LA TRANSMISION , ESTA DISPUESTA A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL . CON ESTA ESTRUCTURA, LAS PARTES DEL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SON MAS ACCESIBLES PARA FINES DE MONTAJE Y DE MANTENIMIENTO, POR LO QUE SE OBTIENE TAMBIEN PARA EL RODAMIENTO UN ANCHO DE APOYO RELATIVAMENTE REDUCIDO Y CON ELLO UN AHORRO DE ESPACIO.
DISPOSITIVO PARA TRANSPORTE DE OBJETOS.
(01/04/1996). Solicitante/s: AB VOLVO. Inventor/es: LILJENGREN, JOHN-ERIK, ZITEK, JOSEF.
DISPOSITIVO PARA DESPLAZAR OBJETOS AL LADO DE UN TRAYECTO PREDETERMINADO FORMADO POR UN SOPORTE UN DESLIZADOR CONTENIDO EN EL SOPORTE Y UN DISPOSITIVO DE AGARRE O SUJECION CONECTADO AL DESLIZADOR QUE SIRVE PARA SUJETAR EL OBJETO TRANSPORTADO POR EL DISPOSITIVO. EXISTE UNA PORTADORA ALARGADA DE MONTAJE DESPLAZABLE EN EL SOPORTE PARA REALIZAR EL MOVIMIENTO INVERSO A LO LARGO DE UN PRIMER TRAYECTO RECTO. EL DESLIZADOR PUEDE MONTARSE LIBREMENTE EN LA PORTADORA ALARGADA PARA REALIZAR EL MOVIMIENTO INVERSO A LO LARGO DE UN SEGUNDO TRAYECTO RECTO, PRACTICAMENTE PERPENDICULAR AL PRIMER TRAYECTO. EL DESLIZADOR TRANSPORTA UN EXTREMO DE UN SISTEMA DE ENLACE CUYO OTRO EXTREMO ESTA LIBRE Y PUEDE DESPLAZARSE EN SENTIDO INVERSO A LO LARGO DE UN TERCER TRYECTO RECTO QUE ES PERPENDICULAR LA PRIMER Y SEGUNDO TRAYECTO. EL EXTREMO LIBRE DEL SISTEMA DE ENLACE TRANSPORTA EL DISPOSITIVO DE SUJECION.
MUÑECA PARA UN ROBOT INDUSTRIAL.
(01/12/1994). Solicitante/s: COMAU S.P.A.. Inventor/es: ORSI, MARIO, AMPARORE, MAURO.
UNA MUÑECA DE ROBOT CON DOS EJES DE ARTICULACION QUE TIENE UN PRIMER CUERPO QUE ES TRANSPORTADO AL EXTREMO DISTAL DEL BRAZO DEL ROBOT, UN SEGUNDO CUERPO SOPORTADO POR EL PRIMER CUERPO PARA SU ROTACION ALREDEDOR DEL PRIMER EJE QUE INTERSECTA EL EJE LONGITUDINAL DEL BRAZO DE ROBOT EN ANGULOS RECTOS, Y UN TERCER CUERPO SOSTENIDO POR EL SEGUNDO CUERPO PARA SU ROTACION ALREDEDOR DEL SEGUNDO EJE QUE INTERSECTA EL PRIMER EJE EN ANGULOS RECTOS. LOS DOS CUERPOS SON ROTADOS POR DOS MOTORES ELECTRICOS MONTADOS EN EL PRIMER CUERPO Y EN EL SEGUNDO CUERPO RESPECTIVAMENTE, CON LA INTERPOSICION DE UNIDADES DE REDUCCION DE "TRACCION HARMONICA" DEL TIPO EN EL QUE EL ROTOR DE SALIDA ES SOPORTADO PARA SU ROTACION MEDIANTE UN ELEMENTO DE SOPORTE DE CARGA QUE FORMA PARTE DE LA UNIDAD DE REDUCCION.
ACCIONAMIENTO DE AL MENOS DOS EJES CONCENTRICOS PARA EL MOVIMIENTO DE UN DISPOSITIVO DE SALIDA DE ROBOT.
(01/07/1994). Solicitante/s: KERPE, STEFAN. Inventor/es: KERPE, STEFAN.
SE TRATA DE UN ACCIONAMIENTO DE AL MENOS DOS EJES CONCENTRICOS PARA EL MOVIMIENTO DE DISPOSITIVO DE SALIDA DE ROBOT, ESPECIALMENTE PARA BRAZOS EN FORMA DE PINZA DE ROBOT, SEGUN SE MUESTRA EN EL DIBUJO. SE DISPONE AL MENOS DE UN REDUCTOR DE VELOCIDAD CIRCULATORIO , CUYA CARCASA Y CUYO EJE DE SALIDA , ESTAN EQUIPADOS CADA UNO CON UNA CORONA DENTADA , QUE CON LOS EJES ACTUAN CONJUNTAMENTE EN SUS CORONAS DENTADAS . LAS CORONAS DENTADAS DE LOS ENGRANAJES , MUESTRAN UNA DIFERENTE VELOCIDAD DE GIRO EN COMPARACION CON LOS ENGRANAJES DE ACCIONAMIENTO , Y LOS EJES DE LAS CORONAS DENTADAS DE LOS ENGRANAJES Y DE LOS EJES MUESTRAN LA MISMA DISTANCIA.
{kind=link}
{kind=link}
{kind=link}
{kind=link}