CIP-2021 : B25J 15/00 : Cabezas de aprehensión.
CIP-2021 › B › B25 › B25J › B25J 15/00[m] › Cabezas de aprehensión.
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 15/02 · servocontroladas.
B25J 15/04 · con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
B25J 15/06 · con medios de retención magnéticos o que funcionan por succión.
B25J 15/08 · teniendo elementos en forma de dedos (B25J 15/02, B25J 15/04 tienen prioridad).
B25J 15/10 · · con tres o más elementos en forma de dedos.
B25J 15/12 · · con elementos en forma de dedos flexibles.
CIP2021: Invenciones publicadas en esta sección.
Efector terminal giratorio, comprimible y expandible, para un robot industrial.
(12/08/2015) Un efector terminal para un brazo de un robot industrial que comprende:
(a) una pluralidad de tubos de succión acoplados en comunicación fluida con un múltiple de vacío;
(b) medios para variar el espaciamiento entre la pluralidad de tubos de succión; caracterizado por que este comprende además
(c) medios para rotar el múltiple de vacío y los medios para variar el espaciamiento entre la pluralidad de tubos de succión con relación al brazo del robot industrial, los medios para rotar comprenden un accionador rotatorio neumáticamente operado que tiene una plataforma rotatoria unida a un miembro de cuerpo, el múltiple…
SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS.
(05/08/2015) Sistema adaptado a un robot para manipular objetos voluminosos, siendo del tipo de robots utilizados en operaciones de riesgo que disponen de un brazo articulado rematado en una pinza, giratoria 360º, para la manipulación de los objetos, de forma que el sistema se basa en que cada una de las hojas conformantes de la pinza se fija un brazo constituido por: un primer tramo y un segundo tramo telescópicos entre sí, de manera que el primer tramo, por su extremo libre, se fija a la correspondiente hoja de la pinza, y, al segundo tramo, por su extremo libre se une, a través de una rótula, un cuerpo de asido de los objetos.
(13/05/2015) Una prótesis de mano que comprende:
un chasis de la mano;
un elemento de pulgar montado en el chasis de la mano para giro del elemento de pulgar con respecto al chasis de la mano alrededor de un eje que se extiende generalmente a lo largo de la longitud del elemento de pulgar; y
un motor situado en uno de los elementos de entre el chasis de la mano y el elemento de pulgar;
caracterizado por que el motor es operable para impulsar a un tornillo sin fin , y por que la prótesis comprende además una rueda dentada del tornillo sin fin situada en el otro elementos de entre el chasis de la mano y el elemento de pulgar, estando el tornillo sin fin engranado con la rueda dentada del tornillo sin fin de tal manera que, cuando se produce el accionamiento del motor, el elemento de pulgar gira con respecto al chasis de la mano.
Aparato y procedimiento de transferencia de guantes.
(01/04/2015) Un aparato para la transferencia de un guante desde un transportador a una estación de trabajo , comprendiendo el aparato:
una cámara para la localización de un puño del guante sobre el transportador ;
un conjunto de recogida que comprende un par de pinzas interiores para sujetar el puño y dos pares de pinzas exteriores para la apertura del guante ;
un par de sensores para determinar la posición del guante agarrado por el par de pinzas interiores y los dos pares de pinzas exteriores ;
un brazo robótico que comprende una pluralidad de segmentos unidos , en el que el conjunto de recogida está montado en uno de la pluralidad…
(11/03/2015) Mano mecánica para la manipulación de probetas, en especial con forma de tubo, con una base de la mano mecánica, con al menos dos dedos de la mano mecánica, que poseen cada uno un tramo de sujeción para recoger una probeta, dispuestos cada uno en la base de la mano mecánica de manera giratoria alrededor de un eje de rotación del dedo con relación a la base de la mano mecánica, estando dispuestos los tramos de sujeción de los dedos de la mano mecánica de manera no centrada con relación al correspondiente eje de rotación del dedo y con un primer accionamiento para la rotación de los dedos de la mano mecánica, estando acoplados los dedos de la mano mecánica de tal modo entre sí, que son accionados por el accionamiento al mismo tiempo y con la misma velocidad y dirección de rotación,…
Dispositivo para su uso en la manipulación de una carga y procedimiento para fabricar un dispositivo de este tipo.
(10/12/2014) Dispositivo para su uso en la manipulación de una carga, con
un bastidor tridimensional que comprende varias piezas individuales (143 a 149, 122 a 125; 35, 36, 38), siendo al menos una parte de las piezas individuales (143 a 149, 122 a 125; 35, 36, 38) elementos planos que comprenden al menos un mecanismo de enchufe con el que se pueden ensamblar las piezas individuales (143, 144, 122 a 125; 35, 36, 38) como el bastidor tridimensional,
un recubrimiento a partir de un plástico reforzado con fibras con el que está recubierto el bastidor, y
al menos un mecanismo de montaje para un mecanismo de manipulación para manipular una pieza que se puede utilizar en una producción de un objeto que constituye la carga.
Máquina y método para el embalaje de artículos en envases de cartón.
(19/11/2014) Máquina para embalar en envases de cartón artículos (A) en contenedores o cajas, con una sección de carga que comprende:
- un área de entrada de artículos, situada para alimentar artículos dispuestos en una fila o en dos filas paralelas, con el posicionado de los artículos en dicha área de entrada sustancialmente de acuerdo a una matriz de una línea de 1xN o una matriz de dos líneas de 2xN durante su uso, donde N es el número de artículos por fila;
- un área para cargar artículos en dichos contenedores;
- un dispositivo de configuración ;
- al menos un primer robot o manipulador colocado para cargar artículos desde dicha área de entrada y transferir los artículos a dicho dispositivo de configuración…
Procedimiento de prensión de objetos, de colocación en una caja y de prensión de esta caja.
(11/06/2014) Procedimiento de prensión de objetos (O1, O2; O'1, O'2) cuyo volumen se inscribe sustancialmente en un paralelepípedo rectángulo, tales como unos envases que contienen huevos, de colocación de estos objetos en una caja (C) paralelepipédica rectangular, y de prensión de esta caja, con ayuda de un dispositivo montado en el extremo de un robot de manipulación, comprendiendo este dispositivo por lo menos una primera pinza constituida por dos mordazas (M1, M2) móviles entre dos posiciones extremas, a saber, una posición denominada "separada" en la que no son aptas para aprisionar uno de dichos objetos (O1, O2; O'1, O'2), y una posición denominada "aproximada" en la que son aptas para aprisionar dicho objeto, efectuándose el movimiento…
Sistema y método de control de calidad para piezas fabricadas.
(23/04/2014) Sistema de producción de piezas fabricadas que comprende un proceso de producción que tiene al menos un robot industrial equipado con una herramienta de manipulación para recoger una pieza fabricada , caracterizado por que el robot está dispuesto en una célula de control de calidad y por que el robot está programado para mantener la pieza fabricada en al menos una posición conocida en la célula de control de calidad, para orientar la pieza fabricada en una orientación conocida en el espacio tridimensional con respecto a la posición conocida y para presentar la pieza para un control de calidad.
(11/12/2013) Una mano artificial adecuada para aplicaciones robóticas como prótesis, que comprende un armazón con un pulgar y al menos dos dedos , y tiene una transmisión por motor con respecto al armazón para ajustar el pulgar y los dedos con respecto al armazón , en el que la transmisión por motor tiene un cárter y un eje posicionado de forma rotatoria sin cárter , y en el que los dedos están conectados al eje , caracterizada porque el cárter está montado en un primer rodamiento (9') soportado por el armazón para permitir que el cárter pueda girar con respecto al armazón y porque el pulgar está conectado al cárter.
Robot con brazo adicional.
(27/11/2013) Robot con un mecanismo de movimiento para desplazar unas piezas estampadas, en particular entre dosprensas consecutivas de un tren de prensas, que permite la realización de movimientos tridimensionales enel recorrido entre las prensas , estando montado en el mecanismo de movimiento un brazo adicional horizontal, el cual está unido con el mecanismo de movimiento a través de una viga , la cual presenta un ejevertical y que permite un giro del brazo adicional alrededor de este eje vertical de la viga , así como undesplazamiento longitudinal horizontal del brazo adicional con respecto a la viga , estando prevista en elextremo exterior del brazo adicional una suspensión de herramienta , la cual se puede girar alrededor de unprimer eje (A1) horizontal y alrededor de un segundo eje (A2), el cual…
Un dispositivo para el agarre y la manipulación de cuerpos cilíndricos alargados, tales como tuberías o similares.
(24/10/2013) Un dispositivo para el agarre y la manipulación de cuerpos cilíndricos alargados (T), tales como tuberías otramos de tuberías que comprende una estructura de soporte con unos medios para su montaje en unamáquina de movimiento de tierras, con unos medios de agarre instalados en dicha estructura de soporte queestán diseñados para sostener el cuerpo cilíndrico alargado por lo menos en dos puntos de agarre a lo largo del ejelongitudinal de dicho cuerpo cilíndrico alargado, dichos medios de agarre comprenden por lo menos una parte fija y por lo menos un elemento movible de agarre articulado con dicha parte fija y sujeto a la acción de los mediospara llevarlo…
Pinza de robot y robot de manipulación.
(18/10/2013) Pinza de robot para asir, transportar y depositar artículos que se deben transportar , en particular bultosde equipaje tales como maletas y bolsas de viaje, con
- una base de pinza con un dispositivo de acoplamiento para la fijación a un brazo de robot ,
- un dispositivo portador , que se extiende en una dirección longitudinal de la pinza , con una superficiede apoyo , que sirve para el apoyo del artículo que se debe transportar y que se extiendeesencialmente en la dirección longitudinal de la pinza y en una dirección transversal de la pinza ,
- un dispositivo de desplazamiento , el cual está dispuesto en una dirección vertical de la pinza porencima del dispositivo portador y que sirve para aplicar una fuerza sobre el artículo que se debetransportar en la dirección longitudinal de la pinza ,
-…
Dispositivo de agarre para el posicionamiento, la fijación, la modificación de posición y/o el cambio de herramientas sobre una superficie de montaje.
(23/09/2013) Dispositivo de agarre para el posicionamiento, la fijación, la modificación de posición y/o el cambio deherramientas sobre una superficie de montaje, que es fijable a una disposición de manejo y posee al menos dosatornilladores fijados a un brazo de agarre para la unión separable de la herramienta por un lado al brazode agarre y por otro lado a una superficie de montaje, en que los atornilladores activan respectivamente unhusillo roscado .
Dispositivo modular de sostenimiento rígido.
(04/09/2013) Dispositivo modular de sostenimiento rígido, particularmente para coger y posicionar una pieza de carroceríaautomóvil, que comprende una parte central hueca, y al menos un brazo solidarizado a la parte deforma liberable y destinado para soportar un órgano de posicionamiento, de sostenimiento o de sujeción de unapieza de carrocería automóvil, en el cual cada brazo comprende una estructura de ajuste a lo largo de laparte central y medios de fijación a la parte central , en cuya parte central huecalleva una pluralidad de ranuras repartidas, para introducir en ellas estructuras (18 a-d) de fijación debrazos, caracterizado en combinación por el hecho de que el dispositivo comprende chavetas (6a-6d) deposicionamiento montadas en ranuras de chaveta o nervaduras…
Cabezal de sujeción para un manipulador o robot de una máquina de hacer envases de cartón.
(07/08/2013) Cabezal de sujeción para un manipulador o robot de carga de una máquina de hacer envases de cartón, comprendiendo el cabezal de sujeción una pluralidad de elementos de sujeción dispuestos en al menos una fila longitudinal de dicho cabezal de sujeción, caracterizado porque cada uno de dichos elementos de sujeción comprende una sección de sujeción adaptada para recibir dos artículos adyacentes y en laterales opuestos respecto a un plano central de la sección de sujeción y porque al menos un subconjunto de dichos elementos de sujeción puede rotar al menos 180 grados alrededor de un eje (Z) paralelo a dicho plano, comprendiendo dicho subconjunto al menos los elementos de sujeción en posición de índice…
Sistema robotizado de llenado de cajas con estuches.
(19/09/2012) Un sistema robotizado para llenar cajas con estuches que comprende un brazo robotizado con una celdilla para encajar los estuches unida solidariamente al extremo del brazo robotizado , o a su mano, caracterizadoporque
la celdilla consiste en un cuerpo básicamente rectangular, abierto por dos de sus lados, en el que los estuchespueden introducirse en uno de los lados, mientras que el otro lado puede introducirse en una caja que recibedichos estuches ;
y en el que la celdilla comprende, al menos, un tope en cada uno de sus lados derecho e izquierdo para fijarla posición de los estuches en el interior de la celdilla, así como un accionamiento para impedir la deformaciónde la caja al llenarse.
MÁQUINA ENCAJADORA Y MÉTODO PARA ENCAJAR PAQUETES EN UNA CAJA DE TRANSPORTE.
(20/07/2012) Máquina encajadora y método para encajar paquetes en una caja de transporte.
La máquina comprende una cinta de alimentación primaria , un carril de alimentación de paquetes, una transportadora de suministro de cajas a la zona de encajado, y comprende además un brazo robótica articulado provisto de dos porciones articuladas entre sí, y una de ellas a la estructura de la máquina; una de dichas porciones comprende un cabezal giratorio de sujeción y transporte de los paquetes , provisto de un conjunto de ventosas , siendo el cabezal o las ventosas susceptibles de desplazamiento vertical.
El método comprende el suministro de paquetes, empujado y posicionado de los paquetes, posicionamiento del extremo del brazo robótica articulado, orientación…
DISPOSITIVO DE GARRA PARA MANIPULACIÓN DE ELEMENTOS FLEXIBLES.
(05/07/2012) Dispositivo de garra para manipulación de elementos flexibles, acopiable a un brazo de robot a modo de efector final, que comprende un bastidor principal y una pluralidad de elementos de agarre acoplados en el bastidor principal mediante respectivos mecanismos de accionamiento (1 a-1f; 2a-2e; 3a- 3f; 4a-4g; 5a-5d; 6a-6g; 7a-7f; 8a-8e; 9a-9f) para agarrar un elemento flexible , caracterizado porque comprende al menos cuatro elementos de agarre para agarrar el elemento flexible ; al menos un elemento de agarre es un elemento de agarre multiposición independientemente desplazable, respecto de los demás elementos de agarre , en al menos una dirección paralela al plano definido por los demás elementos de agarre mediante un sistema de desplazamiento montado en el bastidor principal y en una dirección perpendicular (Z) a dicho plano mediante un…
Mano robótica con dedos similares a los humanos.
(14/03/2012) Una mano robótica , que comprende:
al menos un conjunto de dedos ; y para cada uno de los conjuntos de dedos incluidos en la mano robótica, un conjunto de accionamiento que aplica selectivamente tensión a cuatro elementos tensión alargados y flexibles (c1, c2, c3, c4); en la que el al menos un conjuntos de dedos comprende un conjunto de enlaces (l1, l2, l3) accionados por los elementos de tensión (c1, c2, c3, c4); en la que los enlaces (l1, l2, l3) están interconectados con articulaciones de pivote; y en la que el conjunto de dedos comprende además un conjunto de poleas (p1, p2, p3, p4) soportadas en los enlaces (l1, l2, l3) para apoyar y guiar a los elementos de tensión (c1, c2, c3, c4) en el conjunto…
SISTEMA DE CAMBIO DE HERRAMIENTAS.
(14/03/2012) Sistema de cambio de herramientas para sistemas de transporte de piezas de trabajo en prensas, que comprende una traviesa (Q) y una herramienta (T), en el que la herramienta (T) está constituida por al menos un soporte de base de la herramienta y por brazos de herramienta y porque los brazos de herramienta se pueden sustituir individualmente, en el que el soporte de base de la herramienta está dispuesto de forma desmontable para un proceso de equipamiento en la traviesa (Q) desplazable, y después de un cambio de los brazos de herramienta , que se realiza cuando el soporte de base de la herramienta está desmontado, se puede fijar de nuevo en la traviesa (Q), en el que la conexión entre un brazo de la herramienta y el soporte de base de la herramienta se realiza por medio de una pieza de ajuste de acoplamiento , que se inserta de forma…
Dispositivo de agarrador para recogida y colocación.
(07/03/2012) Un dispositivo de agarrador para recoger un producto alimenticio flexible desde una superficie de soporte yliberarlo, que comprende un soporte, caracterizado porque incluye:
- un par de agarradores montados pivotablemente en el soporte para el movimiento de cada uno de losextremos distales de los mismos acercándose y alejándose uno con relación al otro, y
- una cinta dispuesta de modo que se extiende directamente a través del espacio de separación definido entre losextremos distales de los agarradores cuando éstos están separados de modo que la cinta está capacitadapara extenderse por encima del producto alimenticio que…
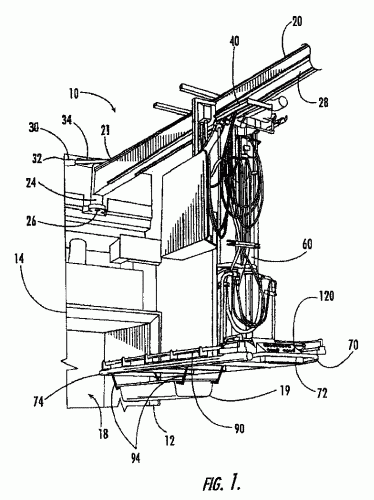
APARATO PARA LA MANIPULACION DE MIEMBROS ESTRUCTURALES.
(01/11/2006). Ver ilustración. Solicitante/s: THE BOEING COMPANY. Inventor/es: SANDERS, DANIEL G., SCHERGEN, MARK T.
Un aparato para manipular un elemento estructural, por ejemplo de 65 kg o más, y el cual es caliente, afilado, tóxico o de otro modo peligroso con: una viga que se extiende desde un primer extremo a un segundo extremo; una lanzadera en comunicación de traslación con dicha viga en una dirección que se extiende entre dichos extremos primero y segundo, un accionador de horquilla conectado a dicha lanzadera, teniendo dicho accionador de horquilla una primera porción y una segunda porción y capaz de levantar y bajar hidráulicamente dicha segunda porción, y una horquilla conectada a dicha segunda porción de dicho accionador de horquilla.
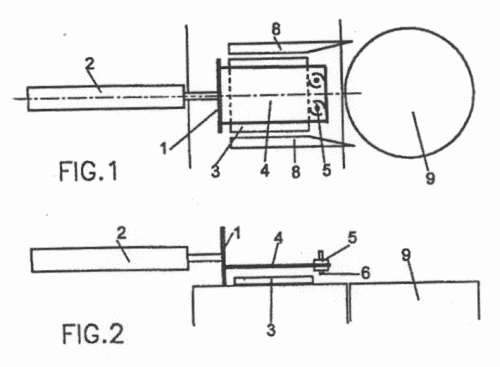
CALIBRADOR AUTOMATICO PARA DISPOSITIVOS DESTINADOS A MEDIR LA DENSIDAD DE PIEZAS CERAMICAS.
(01/10/2006). Ver ilustración. Solicitante/s: BONO SIMO,M. MARAVILLAS FUSTER VENTURA,JOAQUIN. Inventor/es: BONO SIMO,M. MARAVILLAS, FUSTER VENTURA,JOAQUIN.
Calibrador automático para dispositivos destinados a medir la densidad de piezas cerámicas, que comprende unos medios de empuje que provocan el avance controlado de una pieza de calibre de dimensiones adecuadas, desde una pista con guías laterales hasta el interior de un aparato neumático medidor del volumen de la pieza, que una vez realizada la operación permite la actuación de nuevo del empujador en combinación con unos medios extractores, que sacan la pieza del medidor de volumen y la trasladan a su posición inicial.
CONJUNTO PARA SUJETAR PIEZAS DE TRABAJO.
(16/07/2006) Equipo que puede ser utilizado por un robot industrial para sujetar piezas o conjuntos que se están procesando o ensamblando, que comprende una estructura reticular modular , definida por una pluralidad de módulos , conectados entre sí mediante unas conexiones de tornillo , y una pluralidad de elementos de referencia o elementos de posicionamiento (P) unidos a dicha estructura reticular modular mediante unas estructuras reticulares modulares auxiliares respectivas, en el que cada una de dichas estructuras auxiliares comprende un número de barras y un número de bloques de interconexión , así como uno o más dispositivos…
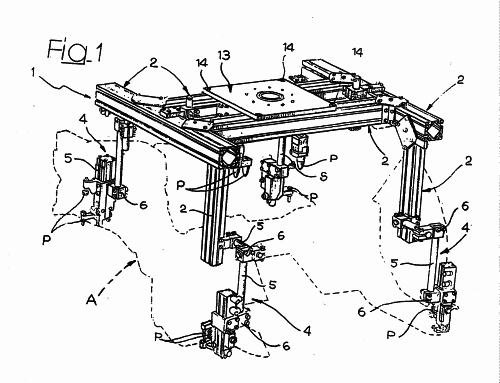
CONJUNTO PARA SUJETAR PIEZAS DE TRABAJO.
(16/05/2006). Ver ilustración. Solicitante/s: COMAU S.P.A.. Inventor/es: GROSSO, CLEMENTE.
Equipo que puede ser utilizado por un robot industrial para sujetar piezas o conjuntos que se están procesando o ensamblando, que comprende una estructura reticular modular , definida por una pluralidad de módulos , conectados entre sí mediante unas conexiones de tornillo , cada uno de los cuales está compuesto por un elemento seccional metálico, provisto de al menos una cavidad longitudinal proyectada hacia una superficie externa del elemento seccional mediante una hendidura longitudinal de una anchura menor que la de la cavidad , caracterizado porque a lo largo de cada una de dichas hendiduras , en intervalos de una longitud (L) predeterminada fija, se obtienen unos pares de muescas opuestas en los lados encarados de la hendidura , para acoplar unos cojinetes de guiado para unos tornillos de conexión para conectar los módulos de la estructura.
DISPOSITIVO DE AGARRE MODULAR DESTINADO A SER MONTADO SOBRE UN BRAZO DE ROBOT.
(01/05/2006) Dispositivo de agarre, destinado a ser montado sobre un brazo de robot, que comprende una viga central que presenta buenas características de inercia en flexión y en torsión, y al menos un brazo solidarizado con la viga de forma liberable y destinado a soportar un órgano de posicionamiento, de retención o de sujeción de una pieza de carrocería automóvil, siendo la viga central hueca con el fin de aligerar la viga central conservando las buenas características de inercia en flexión y en torsión, caracterizado, en combinación, porque la indicada viga central comprende una primera conformación predeterminada de indexación y porque cada…
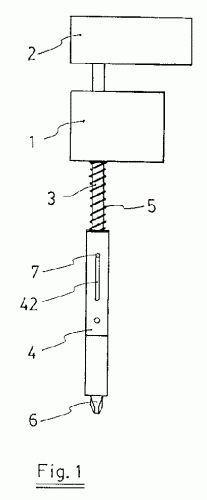
(16/02/1998). Ver ilustración. Solicitante/s: S.A. SISTEL. Inventor/es: BATET TORRAS,JORDI.
ELEMENTO DE AJUSTE, QUE INCORPORA UN EJE GUIA, SOLIDARIO A UN ELEMENTO MOTOR, SOBRE EL QUE SE FIJA UN ELEMENTO PORTACABEZAS POSIBILITADO DE DESPLAZAMIENTO LONGITUDINAL Y SOLIDARIZADO CON EL EN EL GIRO, INCORPORANDO EL EXTREMO ANTERIOR DEL EJE GUIA Y EXTREMO POSTERIOR DEL ELEMENTO PORTACABEZAS Y UNOS MEDIOS DE GUIADO QUE ASEGURAN EL ALINEAMIENTO DE LOS MISMOS CUANDO SE ENCUENTRAN EN POSICION DE REPOSO Y QUE PERMITEN UN LIGERO DESPLAZAMIENTO DEL EXTREMO ANTERIOR DEL PORTACABEZAS SOBRE UN PLANO PERPENDICULAR AL EJE GUIA CUANDO LA CABEZA FIJADA AL ELEMENTO PORTACABEZAS ENTRA EN CONTACTO CON EL ELEMENTO A AJUSTAR DEL CIRCUITO DESPLAZANDO EL PORTACABEZAS HACIA LA ZONA POSTERIOR DEL EJE GUIA VENCIENDO LA RESISTENCIA QUE OPONE UN RESORTE MONTADO SOBRE ESTA. ESTE ELEMENTO DE AJUSTE SE UTILIZA PARA AJUSTAR AUTOMATICAMENTE CUALQUIER ELEMENTO INSERTADO EN UN CIRCUITO ELECTRONICO.
PROCEDIMIENTO Y DISPOSITIVO PARA EL ENSAMBLAJE AUTOMATICO Y LA MECANIZACION DE VARIOS COMPONENTES.
(01/02/1997). Solicitante/s: KUKA SCHWEISSANLAGEN & ROBOTER GMBH. Inventor/es: EMERICH, BRUNO.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO Y UN DISPOSITIVO PARA EL MONTAJE AUTOMATICO Y MECANIZADO DE MULTIPLES COMPONENTES , EN PARTICULAR PARTES DE CARROCERIA DE UN VEHICULO. UN MANIPULADOR CONTROLA UN DISPOSITIVO DE AGARRE AJUSTADO CON AGARRADORES CONTROLABLES, CON LOS QUE EL DISPOSITIVO DE AGARRE SUJETA LOS COMPONENTES DE AGARRE CONTROLABLE CON EL DISPOSITIVO DE AGARRE DE FORMA AUTOMATICA CON LOS COMPONENTES SUJETOS DE FORMA LIBRE SOBRE UNO O MULTIPLES DISPOSITIVOS DE LECTURA DE COMPONENTE Y EFECTUA EL MONTAJE EN LA CONFIGURACION REQUERIDA PARA SUMINISTRAR UN MONTAJE FINAL . LOS COMPONENTES SUJETOS MEDIANTE LOS AGARRADORES SON ALIMENTADOS DURANTE Y/O DESPUES DEL MONTAJE, DEPENDIENDO DEL ORDEN DE MONTAJE REQUERIDO, A AL MENOS UNA PLANTILLA DE CALIBRACION DE FABRICACION. EL DISPOSITIVO DE AGARRE PUEDE GUIAR TAMBIEN LOS COMPONENTES DE MONTAJE, MANTENIENDO SU CONFIGURACION, A UNA ESTACION INTERMEDIA QUE PUEDE TRABAJAR UTILIZANDO UN AGARRADOR DE HERRAMIENTA.
DISPOSITIVO PARA FIJAR UNA RUEDA.
(16/07/1995). Solicitante/s: LINDE AKTIENGESELLSCHAFT. Inventor/es: KLANE, BERND, DIPL.-ING., REBHAN, DIETER, ING., WOLF, ERICH ING.
LA INVENCION TRATA DE UN DISPOSITIVO PARA LA FIJACION DE UNA RUEDA. SE ACONSEJA COLOCARLA DE FORMA AXIAL HACIA LA RUEDA , SOBRE UN FUELLE HINCHABLE , EL CUAL ESTA APOYADO EN UN ESTADO YA INFLADO EN LA RUEDA DE VASTADA . PREFERIBLEMENTE, EL FUELLE SE AJUSTA SOBRE UNA SUJECCION EN FORMA DE TAMBOR.
DISPOSITIVO PARA SUJETAR UN ROBOT SOBRE UN BRAZO DE SOPORTE.
(01/05/1995). Solicitante/s: COMAU S.P.A.. Inventor/es: ZONA, MAURO, BETTINARDI, MARCO.
UN ROBOT ARTICULADO TIENE UNA SUJECCION SIMILAR A UNAS PINZAS CON UNA PARTE CENTRAL Y DOS PARTES PIVOTANTES QUE SE ARTICULAN CON LA PARTE CENTRAL , LA SUJECCION SIRVE PARA CONECTAR EL ROBOT A UN BRAZO DE SOPORTE DE FORMA FIJA O DESLIZABLE.
CABEZAL DE FRESADO, ESPECIALMENTE PARA ROBOT DE MECANIZADO.
(01/01/1994). Solicitante/s: SOCIETE NATIONALE D'ETUDE ET DE CONSTRUCTION DE MOTEURS D'AVIATION, "S.N.E.C.M.A.". Inventor/es: NIOCHE, JEAN-YVES MARIE, DELAVAL, JACQUES, LIENHART, GUY, PONTIER, JEAN-MARIE.
UN CONJUNTO DE MECANIZADO ESTA UNIDO PARTICULARMENTE A UN BRAZO DE ROBOT POR UN SOPORTE DE FIJACION COMPUESTO POR UNA PRIMERA PARTE EN FORMA GENERAL DE TAPADERA CON DOS ALAS EN EL INTERIOR DE LA CUAL ESTA DISPUESTA UNA SEGUNDA PARTE ENCERRANDO EL CONJUNTO DE MECANIZADO , UNIDA A LA PRIMERA PARTE POR AL MENOS UN ELEMENTO DE BARRA DE TORSION QUE LA DEJA UN GRADO DE LIBERTAD EN RELACION A LA PRIMERA PARTE.
{kind=link}
{kind=link}
{kind=link}
{kind=link}