MÁQUINA ENCAJADORA Y MÉTODO PARA ENCAJAR PAQUETES EN UNA CAJA DE TRANSPORTE.
Máquina encajadora y método para encajar paquetes en una caja de transporte.
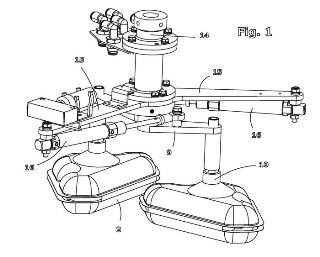
La máquina comprende una cinta de alimentación primaria (1), un carril de alimentación de paquetes, una transportadora (5) de suministro de cajas (4) a la zona de encajado, y comprende además un brazo robótica (7) articulado provisto de dos porciones (71, 72) articuladas entre sí, y una de ellas a la estructura de la máquina; una de dichas porciones comprende un cabezal giratorio de sujeción y transporte de los paquetes (2), provisto de un conjunto de ventosas (10), siendo el cabezal o las ventosas susceptibles de desplazamiento vertical.
El método comprende el suministro de paquetes, empujado y posicionado de los paquetes, posicionamiento del extremo del brazo robótica articulado, orientación del cabezal a una zona de recogida, descenso del cabezal o de las correspondientes ventosas y carga de los paquetes, elevación del cabezal, giro y desplazamiento del cabezal y/o de las ventosas entre sí y descenso del cabezal.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030975.
Solicitante: SERFRUIT, S.A.
Nacionalidad solicitante: España.
Inventor/es: RIHUETE VAREA,JOSE MARIA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
- B25J15/06 B25J […] › B25J 15/00 Cabezas de aprehensión. › con medios de retención magnéticos o que funcionan por succión.
- B65B5/10 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 5/00 Embalaje de objetos individuales en receptáculo o recipientes, p. ej. sacos, bolsas, cajas, cartones, latas, tarros. › Llenado de receptáculos o recipientes, progresivamente o por etapas sucesivas, introduciendo sucesivamente los objetos o capas de objetos.
- B65G47/91 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › que tienen pinzas neumáticas, p. ej. aspirantes.
Fragmento de la descripción:
Máquina encajadora y método para encajar paquetes en una caja de transporte.
La presente invención tiene por objeto una máquina encajadora en la que se toman un conjunto de paquetes de diferentes formas geométricas (rectangular, triangular, etc.) , mediante una herramienta giratoria provista de un conjunto de ventosas y los colocan en el interior de una caja de transporte de manera ordenada, produciendo el giro correspondiente de los paquetes, de modo que ocupen el adecuado espacio en la caja de transporte en la que se colocan.
Se dirige también la presente invención a un método para encajar los paquetes en la caja de transporte, que comprende la toma de los paquetes desde una transportadora de cinta o de rodillos mediante la sujeción por medio de una herramienta provista de ventosas neumáticas, medios de giro de dicha herramienta y posiblemente también de dichas ventosas; el giro de los mismos para su colocación en la caja, incluyendo también el giro en sentidos opuestos de una pareja de paquetes para la ocupación del espacio central de la caja, y el descenso de la herramienta o de las ventosas con los paquetes para su ubicación en la caja, posiblemente desplazándolos tras su ubicación en la caja para ser dispuestos en la posición precisa.
Denominamos paquetes a cualquier tipo de cuerpo con pestañas o sin pestañas susceptible de ser encajado en una caja, tales como tarrinas, envases, cajas (pequeñas cajas conteniendo productos que se ubican en cajas de transporte de mayor tamaño) , cestas, bandejas o cubetas cerradas o retractiladas, y otros cuerpos similares, con formas geométricas predeterminadas y que deben adoptar una determinada posición y orientación en su ubicación de encajado.
En la tecnología de encajado de paquetes, se suministran un conjunto de paquetes llenos de productos ó vacíos, a través de una transportadora de banda o rodillos que desplaza el conjunto de paquetes desde una zona de llenado automático o manual hasta la zona de encajado. Los paquetes se
desplazan en dicha transportadora hasta la zona de carga, que puede disponer de topes predeterminados para permitir la correcta ubicación de los paquetes, en el ámbito de actuación de un brazo provisto de ventosas.
Cuando se trata de paquetes que por su forma y su situación en el interior de la caja no es necesaria la rotación independiente de cada uno de los paquetes que coge la herramienta con ventosas, el sistema de encajado consistirá en tomar los paquetes de la zona de carga, desplazarlos mediante el giro del brazo robotizado de sus diferente ejes y descargarlos en la ubicación adecuada en el interior de la caja, repitiendo los movimientos de carga, desplazamiento y descarga hasta completar el número necesario de paquetes en cada caja.
Sin embargo, cuando se trata de paquetes que por su forma y situación en el interior de la caja sí que es necesaria la rotación independiente de cada uno de los paquetes que coge la herramienta con ventosas es mucho más complejo, debido a que cada una de las ventosas que lleva la herramienta debe disponer de un sistema de giro independiente. A modo de ejemplo, detallamos la complejidad que implica encajar paquetes triangulares, que aunque su planta sea básicamente triangular, los ángulos de dichos paquetes son romos.
En la realización preferente de la invención, se trata de llenar cajas en las que cada capa está provista de seis paquetes triangulares, de modo que cuatro de dichos paquetes ocuparán las esquinas de cada capa de la caja, mientras que dos de ellos se encuentran situados en el hueco central que dejan los otros cuatro. En esta disposición no es posible realizar una simple traslación de los paquetes, puesto que cada uno de ellos se sitúa en una posición diferente en relación con el otro respecto a la posición original en la que se sitúan en la zona de recogida.
Estado de la técnica
ES 2 143 365 describe una máquina encajadora para frutas que comprende una ventosa por cada pieza de fruta que ha de ser encajada, que las toma todas simultáneamente y las desplaza hacia el lugar en el que se encuentra la caja. Comprende una alimentación continua de cajas y evacuación de las mismas.Semejante solución puede darse con paquetes, en los que la succión se realiza sobre un paquete posiblemente lleno de pequeños frutos (fresas, uva, tomates cherr y , rábanos, etc.) en lugar de sobre la fruta, pudiendo ser éstos encajados en tanto que la caja no esté provista de solapas laterales hacia el interior que impidan la colocación mediante un desplazamiento vertical.
Sin embargo, no se ha descrito como encajar de modo automático paquetes en cajas que dispongan solapas, las cuales suponen un obstáculo en el desplazamiento vertical, así como tampoco es conocido como encajar paquetes triangulares o de otras formas en los que cada uno adopta una posición distinta en la caja. Los paquetes triangulares a los que hacemos referencia, presentan en sus ángulos un achatamiento, permaneciendo la forma triangular como predominante.
Descripción de la invención
La invención que se propone tiene por objeto una máquina encajadora que permite realizar de modo totalmente automático el encajado de paquetes de diferentes formas geométricas (triangulares, rectangulares, etc.) en cajas que puedan tener solapas interiores en los testeros o no tenerlas, tanto de conjuntos de paquetes con una distribución en forma de una matriz de filas y columnas, como en una distribución aleatoria que dependerá de la forma geométrica de los paquetes y del hueco disponible en la caja que se vaya a utilizar. Un ejemplo de distribución aleatoria sería de paquetes triangulares. Según una configuración típica, estos paquetes triangulares se disponen una en cada ángulo de la caja, y otros dos en el centro, con sus hipotenusas contiguas, ocupando el espacio restante.
a máquina comprende:
• una cinta de alimentación primaria de paquetes;
• una carril de alimentación de paquetes a la zona de carga desde la cinta de alimentación primaria, paquetes que se suministran secuencialmente en una determinada posición, y que son acumuladosen una posición previa al encajado pudiendo utilizarse topes de desplazamiento y empujadores según las necesidades;
• una transportadora de suministro de cajas a la zona de encajado, y de evacuación de las mismas una vez llenas;
• un brazo robótica articulado, que comprende:
• medios de rotación respecto al extremo de la segunda porción del brazo robótica; • un conjunto de ventosas de succión; las ventosas estarán activas en las fases de recogida y transporte, y estarán inactivas en la fase de descarga y retorno a la zona de carga; • medios de elevación o descenso del cabezal en su conjunto o de las ventosas individualmente; normalmente dichos medios serán de accionamiento neumático. Para el caso de que se trate de encajar paquetes que por su forma y situación en el interior de la caja sea necesaria la rotación independiente de cada uno de los paquetes que coge la herramienta con ventosas (como por ejemplo triangulares) , el cabezal comprenderá además: • Una pareja de brazos de soporte de las ventosas, de articulación libre respecto a un eje próximo al eje de giro del cabezal; • Una pareja de brazos de soporte del otro de los extremos de los dispositivos extensores, fijos respecto al eje del cabezal. El accionamiento de los dispositivos extensores podrá ser independiente para cada uno de ellos, y producirá un giro del brazo de soporte correspondiente, y también de la ventosa soportada por dicho brazo, produciendo como consecuencia el desplazamiento de la ventosa soportada, y del paquete que dicha ventosa sujeta, según el arco correspondiente al giro de dicho brazo de soporte, así como su correspondiente... o una primera porción que articula respecto a un eje de rotación vertical sobre una base de sujeción en la estructura de la máquina en la que se sitúa;
o una segunda porción articulada sobre dicha primera porción;
Reivindicaciones:
1. Máquina encajadora para encajar paquetes en una caja de transporte, que comprende:
• una cinta de alimentación primaria (1) de paquetes (2) ;
• un carril de alimentación de paquetes a la zona de carga desde la cinta de alimentación primaria,
• al menos un tope de desplazamiento (11) de los paquetes en dicha cinta de alimentación primaria (1) ;
• al menos un dispositivo empujador (12) de los paquetes detenidos en el tope de desplazamiento (11) ;
• una transportadora (5) de suministro de cajas (4) a la zona de encajado,
• una transportadora de evacuación (6) de cajas e4) ; caracterizada porque comprende además un brazo robótica (7) articulado provisto de dos porciones;
• una primera porción (71) articulada respecto a un eje de rotación vertical sobre una base de sujeción en la estructura de la máquina en la que se sitúa;
• una segunda porción (72) articulada sobre dicha primera porción (71) ; y
• porque la segunda porción comprende una herramienta giratoria consistente en un cabezal (8) de sujeción y transporte de los paquetes
(2) dispuesto en la parte inferior del extremo libre de dicha segunda porción (72) del brazo robótica (7) , y susceptible de giro respecto a éste, el cual está provisto de un conjunto de ventosas (10) , siendo el cabezal o las ventosas susceptibles de desplazamiento vertical.
2. Máquina encajadora para encajar paquetes en una caja de transporte, según la reivindicación 1, caracterizada porque el cabezal comprende una pareja de brazos (9) de soporte de las ventosas, de articulación libre respecto a un eje (13) próximo al eje de rotación (14) del cabezal (8) .
3. Máquina encajadora para encajar paquetes en una caja de transporte, según la reivindicación 2, caracterizada porque el cabezal comprende una pareja de brazos fijos (15) , cuya posición es invariable respecto a la del cabezal (8)
4. Máquina encajadora para encajar paquetes en una caja de transporte, según las reivindicaciones 2 y 3, caracterizada porque cada uno de los brazos
(9) de soporte de las ventosas (10) está accionado por un dispositivo extensor (16) , uno de cuyos extremos se encuentra articulado en uno de los brazos fijos (15) y el otro en dicho brazo (9)
5. Máquina encajadora para encajar paquetes en una caja de transporte, según la reivindicación 4, caracterizada porque los dispositivos extensores
(16) consisten en pistones neumáticos.
6. Máquina encajadora para encajar paquetes en una caja de transporte, según la reivindicación 1, caracterizada porque el conjunto de ventosas dispuestas en el cabezal adopta una configuración lineal.
7. Máquina encajadora para encajar paquetes en una caja de transporte, según cualquiera de las reivindicaciones 1 a 6, caracterizada porque comprende además al menos un gancho (32) de sujeción inferior, susceptible de desplazamiento entre una posición de sujeción y una posición de liberación.
8. Máquina encajadora para encajar paquetes en una caja de transporte, según cualquiera de las reivindicaciones 7 a 9, caracterizada porque comprende además al menos un gancho fijo (31) .
9. Máquina encajadora para encajar paquetes en una caja de transporte, según las reivindicaciones 7 y 8, caracterizada porque el extremo de los ganchos fijo (31) y móvil (32) comprende una pestaña (33) .
10. Método para el encajado de paquetes en cajas, que comprende el suministro y posicionamiento de una caja en una zona de carga, y el Posicionamiento y suministro de paquetes desde una cinta de alimentación primaria; caracterizado por comprender además las siguientes etapas:• Empujado del paquete hacia la un carril de alimentación (3) de los paquetes (2) ;
• Posicionamiento de los paquetes en una cinta de alimentación específica, de forma ordenada, hasta alcanzar un número de paquetes predeterminado, que serán introducidos en la caja simultáneamente;
• Alcanzado el número de paquetes predeterminado (conjunto de paquetes) , posicionamiento del extremo de un brazo robótica articulado, provisto de una primera porción y una segunda porción articulada a la primera, en una posición de recepción de paquetes;
• Orientación de un cabezal de sujeción y transporte dispuesto en el extremo libre de la segunda porción del brazo robótica, que comprende un conjunto de ventosas de succión;
• Descenso del cabezal o de las correspondientes ventosas hasta una posición de toma de los paquetes, activación de las ventosas y carga del conjunto de paquetes por succión de dichas ventosas;
• Elevación del cabezal o de las correspondientes ventosas hasta una altura de transporte;
• Giro del brazo robótica y del correspondiente cabezal hasta el posicionamiento de dicho cabezal en una posición de descarga en la caja;
• Descenso del cabezal o de las ventosas hasta una altura de descarga; para un determinado tipo de paquete, la altura de descarga puede variar en función de la capa en la que se estén depositando los paquetes;
• Elevación del cabezal y retorno a la zona de carga para la toma de un nuevo conjunto de paquetes;
• Evacuación de la caja cuando ésta está llena, y posicionamiento de una nueva caja en la zona de carga.
11. Método para el encajado de paquetes en cajas, según la reivindicación 10, caracterizado porque las zonas de descarga serán inicialmente las correspondientes a los testeros de la caja y una vez situadas los paquetes junto a los testeros, se ocuparán los espacios situados entre ellos.12. Método para el encajado de paquetes en cajas, según la reivindicación 10, caracterizado porque la posición de descarga de los paquetes correspondientes a los testeros, en el caso de cajas con solapas en los testeros estará desplazada una cierta distancia de dichos testeros.
13. Método para el encajado de paquetes en cajas, según cualquiera de las reivindicaciones 10 a 12, caracterizado porque comprende además el accionamiento de unas palas o ganchos de sujeción adicional de los paquetes entre una posición de liberación y una posición de sujeción.
14. Método para el encajado de paquetes en cajas, según la reivindicación 12, caracterizado porque incluye el desplazamiento del cabezal en la altura de descarga, hasta que el conjunto de paquetes quede arrimado al testero correspondiente.
15. Método para el encajado de paquetes en cajas, según cualquiera de las reivindicaciones 10 a 14, caracterizado porque debiendo encajarse paquetes triangulares en una disposición en la que cuatro de dichos paquetes ocupan una posición en cada uno de los ángulos de la caja girados respectivamente entre sí 90°, y dos en una posición central, girados 180° entre sí y 45°, 135°; 225°, y 315° respecto a los paquetes dispuestos en los ángulos, comprende además las siguientes etapas:
• Disposición del cabezal de sujeción y transporte dispuesto en el extremo libre de la porción secundaria del brazo robótica, que comprende unos brazos articulados provistos de un conjunto de ventosas de succión;
• Giro de al menos uno de los brazos de soporte de las ventosas, de modo que se produzca un giro relativo de una de las ventosas y del paquete que dicha ventosa sujeta con respecto a la otra ventosa.
16. Método para el encajado de paquetes en cajas, según la reivindicación 15, caracterizado porque para los paquetes que van a ser descargados en los testeros, el giro será de aproximadamente 90° de una de las ventosas y del correspondiente paquete respecto a la otra ventosa.17. Método para el encajado de paquetes en cajas, según la reivindicación 16, caracterizado porque el giro se realizará únicamente de uno de los brazos.
18. Método para el encajado de paquetes en cajas, según cualquiera de las reivindicaciones 15 a 17, caracterizado porque si los paquetes que se van a descargar corresponden al hueco central, el giro será de aproximadamente 180° hasta que éstas queden adosadas
10 19. Método para el encajado de paquetes en cajas, según la reivindicación 18, caracterizado porque el giro lo realizan los dos brazos simultáneamente.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]