Mano robótica con dedos similares a los humanos.
Una mano robótica (110), que comprende:
al menos un conjunto de dedos (300);
y para cada uno de los conjuntos de dedos (300) incluidos en la mano robótica, un conjunto de accionamiento que aplica selectivamente tensión a cuatro elementos tensión alargados y flexibles (c1, c2, c3, c4); en la que el al menos un conjuntos de dedos comprende un conjunto de enlaces (l1, l2, l3) accionados por los elementos de tensión (c1, c2, c3, c4); en la que los enlaces (l1, l2, l3) están interconectados con articulaciones de pivote; y en la que el conjunto de dedos (300) comprende además un conjunto de poleas (p1, p2, p3, p4) soportadas en los enlaces (l1, l2, l3) para apoyar y guiar a los elementos de tensión (c1, c2, c3, c4) en el conjunto de dedos; caracterizada por que se proporcionan cuatro elementos tensión alargados y flexibles (c1, c2, c3, c4), extendiéndose los elementos de tensión sólo parcialmente sobre una cualquiera de las poleas (p1, p2, p3, p4) con envolvente no helicoidal de los elementos de tensión, de tal modo que las articulación de pivote tienen tres grados de libertad de movimiento.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10159530.
Solicitante: DISNEY ENTERPRISES, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 500 SOUTH BUENA VISTA AVENUE BURBANK, CA 91521-0165 ESTADOS UNIDOS DE AMERICA.
Inventor/es: Madhani,Akhil J.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61F2/54 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00). › Manos o brazos artificiales o partes de los mismos.
- A61F2/58 A61F 2/00 […] › Codos; Muñecas.
- B25J15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
PDF original: ES-2381656_T3.pdf
Fragmento de la descripción:
Mano robótica con dedos similares a los humanos.
5 Antecedentes de la invención
1. Campo de la invención La presente invención se refiere en general a la robótica y, más particularmente, a una mano robótica que incluye dedos diseñado para encajar en un factor de forma humana y para mover y comportarse más como los dedos de una mano humana.
2. Antecedentes Relevantes
En los últimos años, ha habido una creciente demanda de robots que simulen o imiten más estrechamente a los seres humanos. Por ejemplo, figuras animatronic son sistemas robóticos que están diseñadas para duplicar personajes lo más fielmente posible, y muchos de estos personajes son personajes humanos o similares a humanos. Los robots utilizados para proporcionar figuras animatronic se puede mostrar como parte de paseos, atracciones, espectáculos de teatro, exposiciones comerciales, y otros lugares de ocio y entretenimiento. En esta configuración, existe el deseo de figuras animatronic o robots que imitan el personaje, tal como un personaje de una película de cine o de animación, en términos de su forma, destreza y habilidad para producir movimientos y fuerzas (por ejemplo, el dinamismo de un personaje imitado) . Además, puede ser útil que un robot esté diseñado para reproducir capacidades físicas, tales como, caminar y manipular objetos, tales como con los dedos de una mano robótica. Muchos de los personajes se hacen para tener características humanas o elementos, tales como manos, dedos, y similares, aun cuando no es un humano o similar a un humano, por ejemplo, hormigas, aves, monstruos, y así sucesivamente con manos y dedos similares a las de un humano.
Cada vez más, a los diseñadores y fabricantes de robots se les está solicitando el diseño de sistemas robóticos con funciones y capacidades antropomorfizadas o similares a las de un humano para utilizarse en aplicaciones de no entretenimiento. Estos usos pueden incluir un robot diseñado para la atención al paciente en un hospital o centro de terapia física, atención a domicilio para un paciente, o un robot para realizar tareas del hogar. En estas aplicaciones, se espera que los sistemas robóticos interactúen con los seres humanos en una forma útil, pero también en una forma atractiva. Los robots se encuentran por lo general más atractivos cuando se miran y se comportan de una manera familiar para los seres humanos, y se ha aceptado de forma general que una efectiva interacción humano
robot se proporciona por un sistema robótico parecido a los humanos o un robot con características o funciones humanas tales como manos y dedos.
En las aplicaciones de entretenimiento y otras, un aspecto difícil e importante es el diseño de las manos robóticas. Por ejemplo, las manos de un personaje robótico, incluso si el personaje no tiene manos humanas, se diseñan típicamente en un intento de imitar la forma, destreza, dinámica y funcionalidad de la mano humana. Por desgracia, ninguno de los diseños de manos robóticas existentes ha superado con éxito todos los retos de diseño en la presentación de una mano humana robótica. Hay numerosos diseños de efectores robóticos en existencia, pero son por lo general variaciones simplistas de pinzas o mandíbulas de dos dedos con un solo grado de libertad que se utilizan para agarrar o sujetar objetos.
45 Se han producido varias "manos" robóticas, pero algunos de estos diseños sólo tienen un parecido mayor con las manos humanas que la pinza de dos garras, pero por lo general presentan carencia en términos de destreza y forma. Por ejemplo, un dedo humano tiene cuatro grados de libertad (GDL) (aunque sólo 3 GDL se suelen controlar de forma independiente) . Sin embargo, con las manos robóticas suelen tener muchos menos GDL, proporcionando algunas manos sólo un GDL en cada mano, lo que limita significativamente su destreza y capacidad de movimiento. Algunos pueden ofrecer un GDL por cada dedo, de tal manera que cada dedo se puede articular de forma independiente. Sin embargo, el movimiento de los dedos puede ser un movimiento simplista como curvarse sobre sí mismo sin el movimiento de lado a lado de cada dedo o el movimiento independiente de partes o dígitos de los dedos como se encuentra en una mano humana.
55 Las manos robóticas existentes que proporcionan un mayor número de GDL son a menudo muy complejas o no coinciden con un factor de forma humana. Por ejemplo, un diseño de mano existente proporciona un total de 24 GDL para la mano con un cumplimiento del factor de forma de dedo relativamente bueno, pero este diseño de mano requiere que el número de cables (o "tendones") y actuadores sea hasta dos veces el número de GDL o cuarenta y ocho en este caso. Esto da como resultado un factor de forma grande en la muñeca y en el antebrazo que es menos humano en apariencia. Un problema adicional con este diseño de mano es que los cables o tendones utilizados para accionar los movimientos de los dedos discurren sobre corredores fijos, de metal o plástico no-lubricados creando problemas importantes de fricción y desgaste.
65 Otra mano proporciona dos dígitos para cada "dedo" y utiliza un mecanismo de poleas y actuadores que no se deja confinar con factor de forma humana (por ejemplo, delgados dedos alargados, una muñeca relativamente pequeña y una palma delgada) . Particularmente, en este diseño de mano, se utiliza una disposición "n + 1" para los cables o tendones de accionamiento, lo que reduce el número de cables necesarios, pero la disposición de poleas es tal que cada uno de los cables se envuelve sobre su polea de apoyo en más de 360 grados, lo que requiere que las poleas sean gruesas (por ejemplo, generalmente dos veces el grosor del cable) lo que dificulta la colocación en un confinamiento de factor de forma del dedo. Además, los cables de crean fricción y desgaste adicional a medida que se cruzan y frotan entre sí durante el funcionamiento de la mano. Además, esta mano robótica requiere cuatro unidades de motor por cada dedo, lo que aumenta los costes, la complejidad, el factor de forma y el mantenimiento.
Sin embargo, se pueden diseñar otras manos robóticas para usar un cable más grueso y que accione los dedos con una disposición de empuje/tirón. Los motores están montados proximalmente a la muñeca que se utiliza para apoyar la mano. Para transmitir energía a través de la muñeca, se utilizan ejes flexibles de accionamiento con un movimiento giratorio a medida en contraposición a un movimiento lineal que se transmiten a través de la muñeca. Este movimiento giratorio se convierte en un movimiento lineal por medio de tornillos de avance montados en la palma de la mano. Esto proporciona la ventaja de hacer pasar un número de ejes de transmisión igual al número de GDL de la mano (por ejemplo, doce en un ejemplo de este diseño) . Sin embargo, una desventaja de la mano de accionamiento giratorio es que doce tornillos de avance se deben confinar dentro de la palma de la mano, lo que da como resultado una palma grande (es decir, mayor que el tamaño humano) . Además, el uso de un cable grueso en disposición de empuje/tirón para accionar los GDL del dedo limita la cantidad de fuerza que se puede aplicar en la dirección de "empuje", lo que puede limitar los usos de este diseño de mano robótica.
Por lo tanto, sigue habiendo una necesidad para el diseño de mano robótica o un sistema robótico que responda a los desafíos asociados con un factor de forma humana, en tanto consigue la funcionalidad esperada de una mano humana. Es preferible que un diseño de mano de este tipo incluya los dedos con un número similar de dígitos como se encuentra en una mano humana y con una destreza y movimiento que sea más humano, como (por ejemplo, dedos que se muevan con un número similar de GDL) . También es preferible que el diseño de mano robótica incluya un número relativamente pequeño de componentes y que tome en cuenta los problemas de desgaste y de mantenimiento asociados con el uso de cables (o tendones) de accionamiento.
El documento US 4.834.761 describe una mano robótica en la que para proporcionar tres grados de libertad de movimiento se proporcionan al menos seis elementos de tensión.
Sumario de la invención
De acuerdo con la invención se proporciona una mano robótica de acuerdo con el preámbulo de la reivindicación 1.
Adicionalmente. De acuerdo con la invención se proporciona un sistema de mano robótica de acuerdo con la reivindicación 12.
La presente invención se dirige a los problemas anteriores proporcionando un diseño para una mano robótica con los dedos... [Seguir leyendo]
Reivindicaciones:
1. Una mano robótica (110) , que comprende:
al menos un conjunto de dedos (300) ; y para cada uno de los conjuntos de dedos (300) incluidos en la mano robótica, un conjunto de accionamiento que aplica selectivamente tensión a cuatro elementos tensión alargados y flexibles (c1, c2, c3, c4) ; en la que el al menos un conjuntos de dedos comprende un conjunto de enlaces (l1, l2, l3) accionados por los elementos de tensión (c1, c2, c3, c4) ; en la que los enlaces (l1, l2, l3) están interconectados con articulaciones de pivote; y en la que el conjunto de dedos (300) comprende además un conjunto de poleas (p1, p2, p3, p4) soportadas en los enlaces (l1, l2, l3) para apoyar y guiar a los elementos de tensión (c1, c2, c3, c4) en el conjunto de dedos; caracterizada por que se proporcionan cuatro elementos tensión alargados y flexibles (c1, c2, c3, c4) , extendiéndose los elementos de tensión sólo parcialmente sobre una cualquiera de las poleas (p1, p2, p3, p4) con envolvente no helicoidal de los elementos de tensión, de tal modo que las articulación de pivote tienen tres grados de libertad de movimiento.
2. La mano robótica de la reivindicación 1, en la que al menos una porción de las poleas (p1, p2, p3, p4) son poleas de una sola ranura sin envolventes helicoidales y en la que los elementos de tensión (c1, c2, c3, c4) comprende cada uno un cable.
3. La mano robótica de la reivindicación 2, en la que cada uno de los elementos de tensión (c1, c2, c3, c4) se envuelve
alrededor menos de la mitad de la circunferencia de cualquiera de las poleas (p1, p2, p3, p4) . 25
4. La mano robótica de la reivindicación 1, en la que el conjunto de enlaces (l1, l2, l3) comprende un primer enlace del dígito (l1) , un segundo enlace del dígito (l1) , y un tercer enlace del dígito (l3) , estando el tercer enlace del dígito montado de forma pivotante en el segundo enlace del dígito y estando el segundo enlace del dígito montado de forma pivotante en el primer enlace del dígito, y en la que el primer y segundo enlaces de dígitos se pueden operar de forma, independientemente, por el conjunto de accionamiento aplicando tensión a los elementos de tensión (c1, c2, c3, c4) .
5. La mano robótica de la reivindicación 4, en la que el conjunto de dedos comprende además un enlace adicional
que acopla el tercer enlace del dígito al segundo enlace del dígito de tal manera que el tercer enlace del dígito se 35 acciona por el movimiento del segundo enlace del dígito como un enlace seguidor pasivo.
6. La mano robótica de la reivindicación 4, comprendiendo además el conjunto de dedos una placa de palma (124) , un miembro de enlace de base, y un primer de enlace que monta el dígito (310) , en la que el miembro de enlace se fija rígidamente unido a la placa de palma (124) para apoyar el conjunto de dedos, en la que el primer miembro de enlace que monta el dígito se monta de forma pivotante en el miembro de enlace de base para pivotar sobre un primer eje, y en la que el primer enlace del dígito se acopla de forma pivotante al primer miembro de enlace que monta el dígito para pivotar sobre un segundo eje transversal al primer eje.
7. La mano robótica de la reivindicación 6, en la que un intervalo de movimiento para el primer miembro de enlace
45 que monta el dígito en relación con el miembro de enlace de base es de menos de aproximadamente 40 grados para definir un movimiento de lado a lado del primer enlace del dígito y en la que un intervalo de movimiento del primer enlace del dígito en relación con el primer miembro de enlace que monta el dígito es menor que aproximadamente 15 grados de giro alrededor del segundo eje en una dirección en sentido antihorario en relación con un plano que se extiende a través del segundo eje y en una dirección en sentido horario con relación el plano que se extiende a través del segundo eje está en el intervalo de aproximadamente 75 a 100 grados.
8. La mano robótica de la reivindicación 4, en la que el primer y segundo de los elementos de tensión terminan en el segundo enlace del dígito y en la que el tercero y cuarto (c3, c4) de los elementos de tensión terminan en el primer enlace del dígito.
9. La mano robótica de la reivindicación 1, en la que el conjunto de accionamiento consiste en tres actuadores que accionan los cuatro elementos de tensión (c1, c2, c3, c4) .
10. La mano robótica de la reivindicación 1, que comprende además una muñeca articulada situada entre los conjuntos de dedos y los conjuntos de accionamiento.
11. La mano robótica de la reivindicación 10, que comprende además conductos de cables que se extienden a través de la muñeca articulada, en la que cada uno de los elementos de tensión (c1, c2, c3, c4) se extiende a través de uno de los conductos de cables y en la que los conductos de cables comprenden cada uno una pared exterior
65 formada con alambre cuadrado que está en línea en las superficies internas con un tubo de revestimiento y los elementos de tensión comprenden cada uno un cable insertado a través uno correspondiente de los tubos de revestimiento.
12. Un sistema de mano robótica, que comprende:
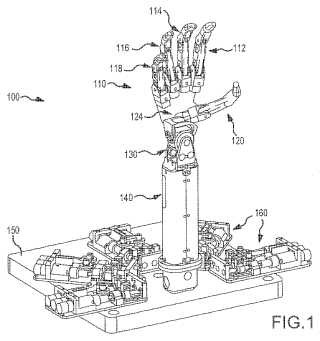
un conjunto de mano robótica que comprende un elemento de palma y una pluralidad de dedos (112, 114, 116, 118, 120) fijados al elemento de palma, en el que los dedos comprenden un conjunto de enlaces y las articulaciones adaptadas para proporcionarle al dedo tres grados de libertad (GDL) de movimiento; un conjunto de cables de accionamiento (c1, c2, c3, c4) para accionar cada uno de los dedos para que realicen el movimiento; y un mecanismo de accionamiento de dedos para cada uno de los dedos; caracterizado por que el conjunto de cables de accionamiento comprende cuatro cables de accionamiento, comprendiendo además el mecanismo de accionamiento un sistema de mantenimiento de tensión pasiva que mantiene cada uno de los cables de accionamiento bajo tensión y comprendiendo tres actuadores que aplican selectivamente fuerzas adicionales de tensión en los cuatro cables de accionamiento (c1, c2, c3, c4) para accionar el dedo, de tal forma que las articulaciones tienen tres grados de libertad de movimiento.
13. El sistema de la reivindicación 12, en el que el sistema de mantenimiento de tensión pasiva comprende una primera y segunda poleas (p1, p2) , un primer par de los cables de accionamiento se conectan entre sí y se envuelven sobre la primera polea (p1) , un segundo par de los cables de accionamiento se conectan entre sí y se envuelven sobre la segunda polea (p2) , y la primera y segunda poleas (p1, p2) , están colocan dentro del mecanismo de accionamiento de dedos para colocar cada uno de los cables bajo tensión.
14. El sistema de la reivindicación 12, en el que los tres actuadores comprenden tres motores de accionamiento para 25 aplicar selectivamente una fuerza de tensión sobre tres de los cuatro cables de accionamiento.
15. El sistema de la reivindicación 12, en el que cada uno de los dedos comprende primer, segundo y tercer miembros de enlace y, estando el primer miembro de enlace montado en el elemento de palma para girar alrededor del primer y segundo ejes ortogonales, estando el segundo miembro de enlace montando de forma pivotante en un 30 extremo del primer miembro de enlace distal al elemento de palma, y estando el tercer miembro de enlace montado de forma pivotante en un extremo del segundo miembro de enlace distal al primer miembro de enlace y, además, en el que un par cables de accionamiento se unen al segundo miembro del dígito y un par de cables de accionamiento se unen al primer miembro de enlace del dígito para permitir que los actuadores muevan independientemente el primer miembro de enlace alrededor del primer y segundo ejes y que muevan independientemente también el
segundo miembro de enlace en relación con el primer miembro de enlace.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]