Cabezal de sujeción para un manipulador o robot de una máquina de hacer envases de cartón.
Cabezal de sujeción (4) para un manipulador o robot de carga de una máquina de hacer envases de cartón,
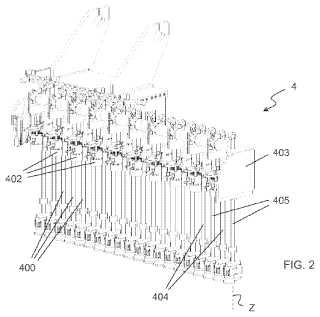
comprendiendo el cabezal de sujeción una pluralidad de elementos de sujeción (400) dispuestos en al menos una fila longitudinal de dicho cabezal de sujeción, caracterizado porque cada uno de dichos elementos de sujeción comprende una sección de sujeción (420) adaptada para recibir dos artículos adyacentes y en laterales opuestos respecto a un plano central de la sección de sujeción y porque al menos un subconjunto de dichos elementos de sujeción puede rotar al menos 180 grados alrededor de un eje (Z) paralelo a dicho plano, comprendiendo dicho subconjunto al menos los elementos de sujeción en posición de índice par o en posición de índice impar en dicha fila longitudinal de elementos de sujeción.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11157856.
Solicitante: Cama1 S.p.A.
Nacionalidad solicitante: Italia.
Dirección: Via Vittor Pisani 12/A 20124 Milano ITALIA.
Inventor/es: Bellante,Daniele.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
- B65B5/08 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 5/00 Embalaje de objetos individuales en receptáculo o recipientes, p. ej. sacos, bolsas, cajas, cartones, latas, tarros. › Embalaje de grupos de objetos, siendo cada grupo sujetado o guiado individualmente para ser transferido al receptáculo o recipiente.
- B65B5/10 B65B 5/00 […] › Llenado de receptáculos o recipientes, progresivamente o por etapas sucesivas, introduciendo sucesivamente los objetos o capas de objetos.
- B65G47/91 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › que tienen pinzas neumáticas, p. ej. aspirantes.
PDF original: ES-2417338_T3.pdf
Fragmento de la descripción:
Cabezal de sujeción para un manipulador o robot de una máquina de hacer envases de cartón Campo de aplicación La presente invención se refiere al campo de las máquinas de hacer envases de cartón. La invención se refiere a un cabezal de sujeción para un manipulador o robot adecuado para uso en una máquina de hacer envases de cartón.
Técnica anterior
En el documento JP-A-9235018 se describe un cabezal de sujeción para manipular artículos. Dicho documento muestra la rotación colectiva de elementos de sujeción dispuestos en una fila longitudinal, en el que cada uno de los elementos de sujeción comprende una sección de sujeción con tres ventosas y en el que los elementos de sujeción rotan 90 grados.
En el campo de las máquinas de hacer envases de cartón se conoce la manipulación de artículos que tienen una forma sustancialmente cónica, por ejemplo, en forma de copa o de tarro pequeño. Ejemplos de dichos artículos son tarros de yogur, copas pequeñas para productos alimenticios o no alimenticios, cápsulas de café. Dichos artículos son muy conocidos tanto en el sector alimentario como en el no alimentario. Su uso ha aumentado considerablemente durante los últimos años, fomentado especialmente por el uso cada vez mayor de cápsulas de café.
Una máquina para envasado secundario de dichos artículos que, de acuerdo con la técnica anterior, comprende uno o varios manipuladores o robots que cargan los artículos en estuches o cajas de cartón de acuerdo con un patrón predefinido. El manipulador o robot trabaja con un ciclo preestablecido entre una estación para la llegada de los artículos y una estación de descarga. Los artículos se suministran a dicha estación de llegada, por ejemplo, en una o más guías de deslizamiento o cintas transportadoras. La estación de descarga puede coincidir con la inserción de los artículos en cajas o estuches.
Por lo general, los artículos cónicos están dispuestos alternando un artículo derecho con un artículo invertido 180 grados para ahorrar espacio. Dicha disposición se conoce como encajado de los artículos y permite un uso óptimo del espacio interior de la caja y, por consiguiente, costes reducidos de transporte y logística. Los artículos adyacentes en una disposición encajada tienen una forma complementaria, es decir, la parte superior de un artículo está adyacente a la parte inferior de otro artículo y viceversa.
No obstante, una disposición encajada no es fácil de obtener, especialmente con grandes volúmenes de producción. Existen sistemas de transporte conocidos y eficaces capaces de formar dos filas paralelas de artículos, en las que los artículos de una fila están girados 180 grados respecto a los artículos de la fila adyacente, que descargan lotes de artículos que están sustancialmente dispuestos en una matriz de 2 x N formada por una fila de artículos derechos y una fila de artículos invertidos. No obstante, dichos sistemas no son capaces de aplicar el encajado dentro de las filas individuales.
Hasta la fecha, la disposición encajada es cara y difícil de obtener. Los sistemas conocidos, en particular, no son 45 satisfactorios en campos tales como el de las cápsulas de café, en los que la máquina de hacer envases de cartón debería manipular una gran cantidad de artículos de pequeñas dimensiones, con una velocidad alta y con la necesidad de gran flexibilidad para funcionar con formatos diferentes. Otro problema es la necesidad de producir cajas con capas (también denominadas niveles) de artículos en las que los artículos se alternan de un modo complementario entre una capa y la otra. Por ejemplo, en el sector del envasado de cápsulas de café es aconsejable 50 que el cierre de una cápsula esté siempre en contacto con el cierre de una cápsula de una capa superpuesta para evitar que se dañe el cierre propiamente dicho. Por lo tanto, los formatos con varios niveles de cápsula exigen la creación de capas o niveles complementarios de cápsulas.
Resumen de la invención 55 El problema que sustenta la presente invención es proporcionar el encajado de artículos que se suministran en dos guías de deslizamiento o filas paralelas, en las que es necesario encajar los artículos de una fila o guía de deslizamiento con artículos de la fila adyacente. Además, la invención tiene como objetivo proporcionar disposiciones complementarias de artículos de la primera y la segunda fila, respectivamente, partiendo de la misma disposición de entrada.
La presente invención se basa en la idea de proporcionar el encajado con un manipulador o robot equipado con elementos de sujeción inversores, es decir, que rotan alrededor de un eje determinado. Por lo tanto, el problema se 5 soluciona por medio de un cabezal de sujeción para un manipulador o robot de carga de una máquina de hacer envases de cartón, comprendiendo el cabezal de sujeción una pluralidad de elementos de sujeción, y en el que los elementos de sujeción están dispuestos en al menos una fila de acuerdo con una dirección longitudinal del cabezal de sujeción, caracterizado porque cada uno de dichos elementos de sujeción comprende una sección de sujeción adaptada para recibir dos artículos adyacentes y en laterales opuestos respecto a un plano central de la sección de sujeción, y porque al menos un subconjunto de dichos elementos de sujeción puede rotar al menos 180 grados alrededor de un eje paralelo a dicho plano, comprendiendo dicho subconjunto al menos los elementos de sujeción en posiciones de índice par o en posiciones de índice impar en dicha fila longitudinal de elementos de sujeción.
Preferentemente, cada uno de dichos elementos de sujeción del cabezal puede rotar alrededor de un eje respectivo.
El eje de rotación pertenece, preferentemente, al plano central que se ha mencionado y, más preferentemente, es un eje de simetría sustancial del elemento de sujeción respectivo. Preferentemente, todos los elementos de sujeción del cabezal pueden rotar alrededor de un eje respectivo y, más preferentemente, la rotación de los elementos de sujeción individuales es independiente. De manera ventajosa, cada elemento de sujeción comprende un accionador
o motor respectivo que controla la rotación axial.
La sección de sujeción puede comprender dos elementos de sujeción, tal como, por ejemplo, ventosas de vacío, en laterales opuestos del plano central. En una forma de realización preferente, cada elemento de sujeción comprende barras de sujeción por vacío o el mismo elemento de sujeción está representado por una barra con un extremo adecuado. Más preferentemente, un elemento de sujeción está representado por una barra que tiene un extremo con dos ventosas o elementos de sujeción equivalentes accionados por succión. La succión se puede generar a través de la barra internamente hueca. Preferentemente, los elementos de sujeción son sustancialmente paralelos.
Otro aspecto de la invención consiste en proveer el cabezal de sujeción de una pluralidad de elementos de sujeción basculantes que se pueden inclinar respecto a una estructura principal del cabezal. En una de las formas de 30 realización, los elementos de sujeción basculantes están alternados con elementos de sujeción que se denominan fijos. El término de elemento de sujeción fijo se usa para indicar un elemento de sujeción que posiblemente puede rotar alrededor de su eje, pero que no puede bascular respecto al cabezal de sujeción. Un elemento de sujeción basculante se puede inclinar entre una primera posición de una alineación sustancial paralela con los elementos de sujeción fijos (posición cerrada) y una segunda posición separada de los elementos fijos y/o de los elementos basculantes en reposo (posición abierta) . En algunas formas de realización, el cabezal de sujeción puede comprender elementos de sujeción que pueden bascular en laterales opuestos respecto a un plano central.
Los elementos fijos y/o los elementos basculantes se pueden rotar alrededor de un eje según se ha definido anteriormente. Preferentemente, todos los elementos, tanto fijos como basculantes, pueden rotar alrededor de un eje respectivo. Por consiguiente y de acuerdo con una forma de realización preferente, un elemento de sujeción basculante está provisto de un doble grado de libertad que comprende inclinación y rotación axial respecto a la estructura.
En una forma de realización preferente, cada elemento de sujeción basculante está soportado por una estructura 45 auxiliar respectiva que está engoznada a la estructura principal del cabezal de sujeción y que está articulada a la estructura principal, por ejemplo, con un punto de apoyo.
Más preferentemente, el cabezal de sujeción comprende una pluralidad de accionadores... [Seguir leyendo]
Reivindicaciones:
1. Cabezal de sujeción (4) para un manipulador o robot de carga de una máquina de hacer envases de cartón, comprendiendo el cabezal de sujeción una pluralidad de elementos de sujeción (400) dispuestos en al menos 5 una fila longitudinal de dicho cabezal de sujeción, caracterizado porque cada uno de dichos elementos de sujeción comprende una sección de sujeción (420) adaptada para recibir dos artículos adyacentes y en laterales opuestos respecto a un plano central de la sección de sujeción y porque al menos un subconjunto de dichos elementos de sujeción puede rotar al menos 180 grados alrededor de un eje (Z) paralelo a dicho plano, comprendiendo dicho subconjunto al menos los elementos de sujeción en posición de índice par o en posición de índice impar en dicha fila longitudinal de elementos de sujeción.
2. Cabezal de sujeción de acuerdo con la reivindicación 1, pudiendo cada uno de dichos elementos de sujeción (400) del cabezal rotar alrededor de un eje respectivo (Z) , siendo el cabezal capaz de rotar selectivamente los elementos de sujeción en posiciones pares e impares en dicha fila.
3. Cabezal de sujeción de acuerdo con la reivindicación 1 ó 2, en el que el eje de rotación (Z) pertenece a dicho plano central.
4. Cabezal de sujeción de acuerdo con la reivindicación 3, en el que dicho eje de rotación (Z) es un eje 20 de simetría sustancial del elemento de sujeción respectivo.
5. Cabezal de sujeción de acuerdo con cualquiera de las reivindicaciones precedentes, comprendiendo cada elemento de sujeción un accionador o motor respectivo que controla la rotación axial.
6. Cabezal de sujeción de acuerdo con cualquiera de las reivindicaciones precedentes, comprendiendo la sección de sujeción (420) de cada elemento de sujeción dos ventosas de vacío (401) en laterales opuestos de dicho plano central.
7. Cabezal de sujeción de acuerdo con una cualquiera de las reivindicaciones precedentes, 30 caracterizado porque dicha pluralidad de elementos de sujeción comprende elementos de sujeción basculantes (404) que se pueden inclinar respecto a una estructura principal (403) del cabezal para aumentar un espacio de distancia entre centros en la dirección longitudinal entre elementos de sujeción adyacentes.
8. Cabezal de sujeción de acuerdo con la reivindicación 7, que comprende una pluralidad de elementos de sujeción basculantes (404) que están alternados con elementos fijos no basculantes (405) , pudiendo cada elemento de sujeción basculante (404) inclinarse entre una primera posición de alineación sustancial paralela a dichos elementos fijos (405) y una segunda posición alejada de dichos elementos fijos.
9. Cabezal de sujeción de acuerdo con la reivindicación 7 u 8, estando cada uno de dichos elementos de sujeción basculantes (404) soportado por una estructura auxiliar (412) provista de al menos un punto de apoyo de inclinación respecto a dicha estructura principal (403) del cabezal de sujeción.
10. Cabezal de sujeción de acuerdo con una cualquiera de las reivindicaciones 7 a 9, que comprende una pluralidad de accionadores o motores respectivos (406) para controlar la inclinación de cada uno de dichos 45 elementos de sujeción basculantes.
11. Cabezal de sujeción de acuerdo con una cualquiera de las reivindicaciones precedentes, que comprende un grupo de accionamiento respectivo para la rotación de cada elemento de sujeción, comprendiendo dicho grupo de accionamiento al menos un accionador o motor (402) y medios de transmisión (409) y en el que el
motor y los medios de transmisión de un elemento de sujeción basculante (404) están montados en la estructura auxiliar respectiva (412) .
12. Cabezal de sujeción de acuerdo con una cualquiera de las reivindicaciones 1 a 6, que comprende medios para alejar los medios de sujeción uno respecto a otro en la dirección longitudinal. 55
13. Cabezal de sujeción de acuerdo con una cualquiera de las reivindicaciones precedentes, en el que dichos elementos de sujeción comprenden o están representados por barras sustancialmente paralelas (400) .
14. Un manipulador o robot (1) para una máquina de hacer envases de cartón, que comprende un cabezal
de sujeción (4) de acuerdo con una cualquiera de las reivindicaciones precedentes.
15. Un robot de acuerdo con la reivindicación 14, que tiene un sistema de control que puede rotar
selectivamente los elementos de sujeción en las posiciones pares o impares. 5
16. Procedimiento para transferir artículos de una estación de llegada a una estación de descarga de una máquina de hacer envases de cartón, en el que los artículos se suministran a la estación de llegada dispuestos en dos filas paralelas y formando una matriz de artículos de 2 x N, en el que la primera fila de dicha matriz se forma con primeros artículos (A1) y la segunda fila se forma con segundos artículos (A2) , comprendiendo el procedimiento el
uso de un manipulador o robot con un cabezal de sujeción de acuerdo con una cualquiera de las reivindicaciones precedentes y en el que las columnas de índice par o las columnas de índice impar de dicha matriz se rotan durante la operación de transferencia debido a una rotación de elementos de sujeción correspondientes (400) de dicho cabezal (4) , generando una disposición encajada de los primeros y de los segundos artículos en la estación de descarga.
17. Procedimiento de acuerdo con la reivindicación 16, en el que:
- el manipulador o robot (1) lleva a cabo al menos un primer ciclo de trabajo cogiendo dicha matriz de entrada de
artículos de 2 x N y produciendo una primera matriz de artículos que comprende primeros artículos encajados con 20 segundos artículos,
- el robot lleva a cabo al menos un segundo ciclo de trabajo cogiendo una matriz de entrada de artículos de 2 x N idéntica y produciendo una segunda matriz de artículos que es complementaria a la primera matriz.
18. Procedimiento de acuerdo con la reivindicación 17, en el que dicha segunda matriz se superpone a dicha primera matriz.
19. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 16 a 18, siendo dichos primeros y segundos artículos cápsulas de café en posición derecha e invertida respectivamente. 30
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]