Robot con brazo adicional.
Robot (14) con un mecanismo de movimiento para desplazar unas piezas estampadas,
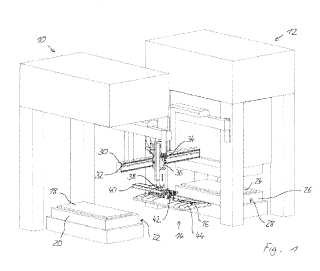
en particular entre dosprensas (10, 12) consecutivas de un tren de prensas, que permite la realización de movimientos tridimensionales enel recorrido entre las prensas (10, 12), estando montado en el mecanismo de movimiento un brazo adicional (40)horizontal, el cual está unido con el mecanismo de movimiento a través de una viga (38), la cual presenta un ejevertical y que permite un giro del brazo adicional (40) alrededor de este eje vertical de la viga (38), así como undesplazamiento longitudinal horizontal del brazo adicional (40) con respecto a la viga (38), estando prevista en elextremo exterior del brazo adicional (40) una suspensión de herramienta (42), la cual se puede girar alrededor de unprimer eje (A1) horizontal y alrededor de un segundo eje (A2), el cual es perpendicular con respecto al primer eje(A1),
comprendiendo la suspensión de herramienta (42) un soporte de herramienta (70, 72),
-que se puede girar alrededor de un tercer eje (A3) perpendicular con respecto al segundo eje (A2), pudiendollevarse el primer eje (A1), el segundo eje (A2) y el tercer eje (A3) a un plano horizontal común.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/067682.
Solicitante: Strothmann Machines & Handling GmbH.
Inventor/es: NAUMANN, BERND, WESSLING-SCHÄFERS,MARKUS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B21D43/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21D TRABAJO MECANICO O TRATAMIENTO DE CHAPAS, TUBOS, BARRAS O PERFILES METALICOS SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DE METALES POR PUNZONADO (trabajo mecánico o tratamiento de alambre B21F). › B21D 43/00 Dispositivos de alimentación, de alineamiento o de almacenado combinados con aparatos para trabajar o tratar la chapa, tubos o perfiles, dispuestos en estos aparatos o especialmente adaptados para ser utilizados en asociación con estos aparatos; Asociación de dispositivos de corte con estos aparatos (dispositivos de corte asociados a las herramientas, ver los grupos previstos para estas herramientas). › por medio de tenazas o pinzas.
- B25J15/00 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
PDF original: ES-2445702_T3.pdf
Fragmento de la descripción:
Robot con brazo adicional.
La invención se refiere a un robot con un mecanismo de movimiento para desplazar unas piezas estampadas, en particular, entre dos prensas consecutivas de un tren de prensas, que permite la realización de movimientos tridimensionales en el recorrido entre prensas.
Se conoce un gran número de robots. En algunos robots el brazo de robot que se puede girar consta, por lo menos, de dos miembros, los cuales están conectados de forma de pueden girar, uno respecto del otro, alrededor de un eje horizontal. Mediante este movimiento de giro o de doblado se puede acortar o alargar la distancia desde el extremo exterior del robot hasta el pie. Por lo demás se puede variar la altura del extremo exterior del robot mediante movimiento de giro adecuado de las dos partes del brazo alrededor de ejes de giro horizontales.
Al trasladar piezas prensadas entre dos prensas hay que tener en cuenta que las relaciones de espacio entre las prensas están estrechadas y, además, que el espacio del que se dispone entre la herramienta superior y la herramienta inferior de una prensa puede ser muy bajo. Por ello es frecuentemente problemático mover piezas estampadas relativamente grandes de una prensa a la siguiente. Si se utilizan para ello robots del tipo mencionado más arriba, los cuales presentan brazos plegables, son un obstáculo tanto los soportes de las prensas contiguas como también el pie del propio robot, ya que el brazo del robot describe, durante el movimiento de giro, una trayectoria circular con su extremo exterior y se aproxima a los soportes de las prensas.
Un problema condicionado por el tipo constructivo de los robots de este tipo consiste además en que el desarrollo del movimiento durante el desplazamiento de las piezas estampadas lleva relativamente mucho tiempo y consume mucha energía.
Además de los robots mencionados con brazo de giro se conocen también robots lineales con una estructuración relativamente sencilla los cuales pueden llevar a cabo un movimiento lineal relativamente sencillo entre las prensas. Los robots lineales conocidos hasta ahora presentan, sin embargo, pocos grados de libertad durante el movimiento de las piezas estampadas y son por ello más bien inadecuados para el presente propósito de utilización en un tren de prensas. Tanto los robots de brazo giratorio como también los robots lineales presentan hasta ahora el problema de que la suspensión de herramienta en el extremo del brazo del robot presenta una altura constructiva la cual dificulta la introducción de piezas estampadas en un espacio relativamente bajo dentro de la prensa.
Por el documento DE-A-3804572 se conoce un robot para el traslado de piezas estampadas el cual comprende una viga longitudinal horizontal como mecanismo de movimiento, en la que se puede desplazar horizontalmente una viga vertical, en la que está dispuesto un brazo adicional horizontal, que se puede girar alrededor del eje vertical de la viga y en cuyo extremo exterior está prevista una suspensión de herramienta, que comprende un soporte de herramienta y que se puede girar o bascular alrededor de varios ejes.
La invención se plantea por ello el problema de crear un robot para desplazar unas piezas estampadas el cual haga posible un movimiento de la pieza estampada con el mayor número de grados de libertad posible con un coste de tiempo y energía pequeños. En particular, hay que hacer posible el desplazamiento de piezas estampadas en un espacio estrechado entre las prensas y la introducción del extremo del brazo de robot en un espacio de prensas muy bajo entre las herramientas de prensado.
Este problema se resuelve según la invención mediante un robot con las características de la reivindicación 1.
Según la invención está dispuesto en el mecanismo de movimiento del robot un brazo adicional el cual está conectado con el mecanismo de movimiento a través de una viga, la cual presenta un eje vertical, la cual permite un giro del brazo adicional alrededor de este eje vertical de la viga así como un desplazamiento longitudinal del brazo adicional con respecto a la viga. Esta posibilidad de giro unida a la posibilidad de extracción del brazo adicional con respecto al brazo del robot propiamente dicho permite una gran movilidad. En particular, se puede acortar o alargar, de forma sencilla, la distancia entre el soporte de herramienta y la base del robot mediante la entrada y salida lineal, sin que el brazo del robot tenga que ser doblado o deba ser movido él mismo de otra forma cualquiera.
En el extremo exterior del brazo adicional está prevista una suspensión de herramienta, la cual se puede girar alrededor de un primer eje horizontal y alrededor de un segundo eje, el cual es perpendicular con respecto al primer eje. Con ello la suspensión de herramienta se puede mover libremente en el espacio, de manera que resulta una posibilidad de posicionamiento relativamente libre de la pieza estampada, que está colgada en la herramienta. El soporte de herramienta propiamente dicho de la suspensión de herramienta se puede girar, adicionalmente, alrededor de un tercer eje, el cual es perpendicular al segundo eje. Con ello resultan además posibilidades de movimientos adicionales de la herramienta en la suspensión de herramienta.
En particular, es posible bascular el segundo eje de la suspensión de herramienta, mediante giro alrededor del primer eje horizontal, a la posición horizontal y poner el soporte de herramienta, mediante giro alrededor del segundo
eje, asimismo en el plano horizontal, de manera que los tres ejes estén situados en el mismo plano horizontal. En esta posición el extremo del brazo adicional presenta, incluida la suspensión de herramienta con el soporte de herramienta, una altura constructiva relativamente pequeña y hace posible, por consiguiente, una introducción de la pieza estampada en un espacio de prensas plano. Esta introducción puede tener lugar, esencialmente, mediante una extracción lineal del brazo adicional en su viga.
Mientras que la construcción según la invención ofrece ventajas con respecto a la altura constructiva durante la retirada o la introducción de la pieza estampada en la prensa, la pieza estampada puede ser girada o basculada libremente, gracias al gran número de grados de libertad existentes, en el espacio entre las prensas, de manera adicional a un movimiento lineal por parte del brazo adicional sobre la base del robot, hacia ésta o alejándose de ella. Los correspondientes desarrollos del movimiento se pueden llevar a cabo con un consumo de tiempo y energía reducido.
La suspensión de herramienta está apoyada preferentemente en un cojinete giratorio para el giro alrededor del segundo eje, cojinete giratorio que está sujeto en el extremo del brazo adicional con posibilidad de giro alrededor del primer eje.
El soporte de herramienta está formado, preferentemente, como sujeción en forma de barra cuyo eje de barra forma el tercer eje.
De acuerdo con una forma de realización preferida de la presente invención el extremo del brazo adicional comprende una pieza de articulación, la cual se puede girar alrededor de un eje vertical y en cuyo extremo está apoyado un tercer eje.
Mediante esta pieza de articulación se puede sujetar, de manera que pueda girar en el extremo del brazo adicional, la suspensión de herramienta también en una posición para la entrada en el espacio de prensas, en el cual están situados el primer, el segundo y el tercer eje en un plano horizontal común. Este giro al plano horizontal alrededor del eje de la pieza de articulación puede hacer posible un ligero desplazamiento angular de la posición del brazo adicional con respecto a la dirección de introducción.
La pieza de articulación está formada, preferentemente, en forma de horquilla y envuelve el cojinete giratorio.
De acuerdo con otra forma de realización preferida el mecanismo de movimiento comprende una viga longitudinal horizontal, en la cual se sujeta la viga a lo largo de la longitud de la viga longitudinal y que se puede desplazar en dirección vertical.
La viga longitudinal sirve por consiguiente para salvar un tramo de recorrido más largo en el espacio intermedio entre las dos prensas que hay que atender. La viga para el brazo adicional en movida, de un lado para otro, entre los extremos de la viga longitudinal horizontal y puede llevar a cabo, en la posición final correspondiente, los desarrollos de movimiento descritos más arriba para la introducción y la retirada de piezas estampadas.
Según otra forma de realización preferida el mecanismo de movimiento comprende un brazo plegable de varias piezas, que puede girar alrededor de un eje vertical, estando dispuesta la viga en el extremo de este... [Seguir leyendo]
Reivindicaciones:
1. Robot (14) con un mecanismo de movimiento para desplazar unas piezas estampadas, en particular entre dos prensas (10, 12) consecutivas de un tren de prensas, que permite la realización de movimientos tridimensionales en 5 el recorrido entre las prensas (10, 12) , estando montado en el mecanismo de movimiento un brazo adicional (40) horizontal, el cual está unido con el mecanismo de movimiento a través de una viga (38) , la cual presenta un eje vertical y que permite un giro del brazo adicional (40) alrededor de este eje vertical de la viga (38) , así como un desplazamiento longitudinal horizontal del brazo adicional (40) con respecto a la viga (38) , estando prevista en el extremo exterior del brazo adicional (40) una suspensión de herramienta (42) , la cual se puede girar alrededor de un primer eje (A1) horizontal y alrededor de un segundo eje (A2) , el cual es perpendicular con respecto al primer eje (A1) ,
comprendiendo la suspensión de herramienta (42) un soporte de herramienta (70, 72) ,
que se puede girar alrededor de un tercer eje (A3) perpendicular con respecto al segundo eje (A2) , pudiendo llevarse el primer eje (A1) , el segundo eje (A2) y el tercer eje (A3) a un plano horizontal común.
2. Robot según la reivindicación 1, caracterizado porque la suspensión de herramienta (42) está apoyada en un cojinete giratorio (58) para girar alrededor de un segundo eje (A2) , estando dicho cojinete giratorio (58) sujeto de 20 manera que pueda girar alrededor del primer eje (A1) , en el extremo del brazo adicional (40) .
3. Robot según la reivindicación 1 o 2, caracterizado porque el soporte de herramienta (70, 72) está formado a modo de sujeción en forma de barra, cuyo eje de barra forma el tercer eje (A3) .
4. Robot según una de las reivindicaciones anteriores, caracterizado porque el extremo del brazo adicional (40) comprende una pieza de articulación (48) , la cual está montada en el brazo adicional (40) giratorio alrededor de un eje (A0) vertical y en cuyo extremo está apoyado el tercer eje (A3) .
5. Robot según la reivindicación 4 cuando está relacionado con la reivindicación 2 o 3, caracterizado porque la 30 pieza de articulación (48) está formada en forma de horquilla y abraza el cojinete giratorio (58) por ambos lados.
6. Robot según un de las reivindicaciones 1 a 5, caracterizado porque el mecanismo de movimiento comprende una viga longitudinal (30) horizontal, en la cual la viga (38) está sujeta de manera móvil a lo largo de la longitud de la viga longitudinal (30) y en dirección vertical.
7. Robot según una de las reivindicaciones 1 a 5, caracterizado porque el mecanismo de movimiento presenta un brazo plegable y de varias piezas, que puede girar alrededor de un eje vertical y porque la viga está dispuesta en el extremo de este brazo.
8. Robot según una de las reivindicaciones anteriores, caracterizado porque para la realización del giro alrededor del primer eje (A1) , del segundo eje (A2) y/o del tercer eje (A3) están previstos uno o varios motores.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]