CIP-2021 : G05B 13/04 : que implican el uso de modelos o de simuladores.
CIP-2021 › G › G05 › G05B › G05B 13/00 › G05B 13/04[2] › que implican el uso de modelos o de simuladores.
G FISICA.
G05 CONTROL; REGULACION.
G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K).
G05B 13/00 Sistemas de control adaptativos, es decir, sistemas que se regulan a sí mismos para obtener un rendimiento óptimo siguiendo un criterio predeterminado (G05B 19/00 tiene prioridad; aprendizaje automático G06N 20/00).
G05B 13/04 · · que implican el uso de modelos o de simuladores.
CIP2021: Invenciones publicadas en esta sección.
Utilización de un controlador multivariable avanzado para el control de unidades alfabutol.
(17/06/2020) Procedimiento de control avanzado (APC) que se puede aplicar a unidades para la oligomerización de etileno a buteno-1 que operan en un reactor en presencia de un catalizador homogéneo en fase líquida y en el punto de burbujeo, caracterizado por que los parámetros controlados simultáneamente de forma continua, denominados parámetros objetivo, son la producción de buteno-1 (Dprod), la presión del reactor (Preac) y la temperatura del reactor (Treac), y las variables de acción son el caudal de carga (Dch), el caudal de cada uno de los componentes del catalizador inyectado, concretamente T2 a base de titanio y LC a base de aluminio, y el caudal del líquido refrigerante que alimenta el o los intercambiadores del circuito…
Método de control de propiedades en sistemas multimodales.
(18/03/2020) Un método de control de un procedimiento para producir un polímero de olefina en al menos un reactor, que comprende:
(a) calcular un primer valor de al menos una propiedad de un primer componente polimérico usando un modelo matemático para el primer componente polimérico producido por un primer catalizador o bajo un primer conjunto de condiciones de reacción;
en donde el método de control del proceso se caracteriza por las etapas de:
(b) calcular un segundo valor de la al menos una propiedad de un segundo componente polimérico usando un modelo matemático para el segundo componente polimérico producido por un segundo catalizador o bajo un primer conjunto de condicione de reacción;
(c) determinar la velocidad relativa…
Procedimiento combinado para detectar anomalías en un sistema de distribución de agua.
(08/01/2020). Solicitante/s: SUEZ Groupe. Inventor/es: JARRIGE,PIERRE-ANTOINE, CAMPAN,FRANCIS, DEMBELE,ABEL, CUSSONNEAU,GUILLAUME.
Un procedimiento para detectar anomalías en un sistema de distribución de agua compuesto por una red de nodos, comprendiendo dicho procedimiento:
- parametrizar un modelo hidráulico del sistema de distribución de agua con un conjunto de valores de variables de control que caracterizan la red y su salida en los nodos;
- utilizar sensores en la red para adquirir observaciones de un subconjunto de variables de estado en primeras referencias temporales;
- identificar al menos una entidad objetivo en la que cambiar los valores de las variables de control en función de al menos dichas observaciones;
- cambiar el conjunto de valores de las variables de control utilizando un ajuste paso a paso de las variables de control y un criterio de interrupción en función de valores residuales de las variables de estado;
- realizar una clasificación de al menos una entidad de la red en un estado de acuerdo con el conjunto de variables de control.
PDF original: ES-2784233_T3.pdf
Equipo de control electrónico para un componente de la generación de aire comprimido, tratamiento de aire comprimido, almacenamiento de aire comprimido y/o distribución de aire comprimido.
(11/12/2019) Equipo de control electrónico para un componente de la generación de aire comprimido, tratamiento de aire comprimido, almacenamiento de aire comprimido y/o distribución de aire comprimido,
en donde el equipo de control electrónico está configurado para recurrir para la determinación, reproducción o evaluación de datos relevantes para el funcionamiento, a uno o varios modelos, que como modelos referidos al componente contienen informaciones relevantes para la estructura o el comportamiento del componente , y mediante los modelos como fin de evaluación en una rutina de evaluación concreta efectuar o un
- control, regulación, diagnóstico y/o monitorización del componente o
- una determinación, facilitación, predicción u optimización…
Procedimiento para optimizar perfiles de movimiento, procedimiento para proporcionar perfiles de movimiento, dispositivo de control, instalación y producto de programa informático.
(04/12/2019) Procedimiento para optimizar los perfiles de movimiento (B1, B2) en una instalación (A), donde la instalación (A) presenta al menos una prensa (1a, 1b, 1c) con una herramienta (7a, 7b) y una pluralidad de sistemas de transferencia (3a, 3b ), donde el movimiento de la respectiva herramienta (7a, 7b) se describe mediante respectivamente un perfil de movimiento de la prensa (B1) y el movimiento del respectivo sistema de transferencia (3a, 3b) se describe mediante respectivamente un perfil de movimiento de transferencia (B2), donde la optimización de los perfiles de movimiento (B1, B2) comprende los siguientes…
Procedimiento para la resolución de una tarea de control en una instalación de proceso.
(16/10/2019) Procedimiento para la resolución de una tarea de control en una instalación de proceso, en particular para el paso de la instalación de proceso de un estado inicial (A) a un estado final (B), mediante modificación de al menos dos magnitudes de ajuste (H_DV, H_TLV) en su rango de ajuste, donde las magnitudes de ajuste están asociadas a una o varias unidad(es) de proceso, en particular válvulas, griferías o tapas, y donde las al menos dos magnitudes de ajuste (H_DV, H_TLV) influyen al menos en una variable de proceso (PT01) de la instalación de proceso, en particular una presión, caracterizado por las etapas siguientes:
- determinación de una distribución de valores de la al menos una variable de proceso (PT01) para distintas combinaciones de valores (x, y) de las al menos dos magnitudes de ajuste (H_DV, H_TLV) en su rango de…
Método de control de propiedades en sistemas multimodales.
(07/08/2019) Un método de control de un procedimiento para producir una composición polimérica, comprendiendo el método:
(a) determinar un volumen existente de una composición polimérica;
(b) calcular un primer valor instantáneo de una propiedad y la velocidad de producción de un primer componente polimérico usando un modelo matemático en un primer tiempo;
(c) calcular un segundo valor instantáneo de la propiedad y la velocidad de producción de un segundo componente polimérico usando un modelo matemático en un primer tiempo;
(d) calcular un valor medio de lecho de la propiedad de la composición polimérica que comprende el primer componente…
Método de control de proceso.
(19/06/2019). Solicitante/s: CORE A/S. Inventor/es: ALSTRØM,PREBEN.
Un método para controlar un proceso, comprendiendo el método un modelo de control adaptativo y al menos una entrada de proceso y al menos una salida de proceso, comprendiendo el modelo de control:
- predecir los objetivos relevantes del proceso; y
- seleccionar los impulsores relevantes del proceso basándose en la predicción de objetivos;
siendo dichos impulsores entradas que pueden ser ajustables y que afectan a los valores objetivo;
en donde dicho método comprende adaptar varios parámetros basándose en una o más entradas, y usar los parámetros adaptados como una entrada para la predicción de objetivo;
en donde dicho método comprende un procesamiento de variables de entrada manipuladas, variables de salida dependientes, variables de entrada no manipuladas y medidas y meta de rendimiento.
PDF original: ES-2745748_T3.pdf
Método y dispositivo para equilibrar el consumo eléctrico.
(12/06/2019) Método para equilibrar el consumo eléctrico generado por una pluralidad de cargas eléctricas, comprendiendo el método las siguientes etapas:
- poner en marcha una planificación de consumo eléctrico de acuerdo con una estrategia determinada,
- estimar una energía absorbida (Ek) por parte de las cargas en un intervalo de tiempo predeterminado, y
- si un valor de la estimación de energía absorbida (Ek) por las cargas no está dentro de un intervalo definido por un umbral de consumo mínimo (THRk,min) y uno máximo (THRk,max),
- calcular una cantidad de energía que debe ser variada en función de una diferencia (Δh) entre el valor de la estimación de la energía absorbida (Ek) y un valor de energía esperado (THRk,esp),
- verificar los efectos de la planificación de consumo eléctrico…
Sistema y procedimiento para monitorizar un sistema integrado.
(22/05/2019) Un sistema de control configurado para monitorizar y controlar un sistema de purificación de agua, que comprende:
uno o más sensores configurados para determinar el carbono orgánico total (TOC) en tiempo real y los parámetros en tiempo real de las aguas residuales impuras de una corriente de alimentación al sistema de purificación de agua;
un sensor flexible configurado para determinar la demanda de oxígeno químico (COD) en tiempo real correspondiente al carbono orgánico total (TOC) en tiempo real de la corriente de alimentación al sistema de purificación de agua que utiliza un patrón de demanda de oxígeno químico;
un estimador en comunicación operativa con el sensor flexible y configurado para:
determinar un estado actual del sistema de purificación de agua…
Control supervisor de canales de irrigación automatizado.
(22/05/2019) Un sistema de suministro para el suministro de fluido a al menos un cliente a través de una red de fluidos controlada por ordenador, teniendo dicha red de fluidos una pluralidad de reguladores para controlar el flujo de fluido a lo largo de dicha red de fluidos para suministrar una cantidad predeterminada de fluido a dicho al menos un cliente, incluyendo dicha red un primer sistema de control para abrir y cerrar dichos reguladores bajo control informático, recogiendo dicho primer sistema de control datos basados en mediciones cronometradas de los niveles de fluido corriente arriba y corriente abajo de los reguladores…
Método para vigilar la fabricación de un producto químico y un cromatógrafo usado en ella.
(17/05/2019). Solicitante/s: UNION CARBIDE CHEMICALS & PLASTICS TECHNOLOGY LLC. Inventor/es: REIB,ROBERT, DUESPOHL,DALE, PARRISH,JOHN.
Un método para vigilar un cromatógrafo usado para controlar la fabricación de un producto químico, comprendiendo el método:
muestrear una mezcla de componentes químicos usados durante la fabricación para formar el producto químico;
medir la composición de la muestra mediante un cromatógrafo y ajustar la cantidad de los componentes químicos a partir de la composición medida;
medir parámetros reales de la muestra mediante al menos un instrumento de medición;
determinar parámetros esperados de la muestra a partir de la composición medida y los parámetros reales medidos usando una ecuación de estado, y
detectar un fallo del cromatógrafo por comparación de los parámetros esperados con los parámetros reales; siendo la ecuación de estado la ecuación de Benedict-Webb-Rubin.
PDF original: ES-2713071_T3.pdf
Piloto automático de vehículo volador.
(24/04/2019) Un metodo implementado por ordenador para controlar un vehiculo volador, que comprende:
recibir, por un piloto automatico (218A) del vehiculo volador, una orden de guiado generada por un sistema de guiado del vehiculo volador; recibir, por el piloto automatico (218A) del vehiculo volador, una medicion de movimiento medida por un dispositivo de medicion de movimiento del vehiculo volador;
generar, por el piloto automatico (218A) del vehiculo volador, una pluralidad de estimadas de estado (230A) utilizando la medicion de movimiento cuando no se encuentra disponible equipo para realizar mediciones de estado real, en donde la pluralidad de estimadas de estado (230A) comprende una estimada de error, una estimada de un angulo de ataque y una estimada del regimen de cabeceo;
utilizar, por el piloto automatico (218A) del…
Procedimiento para el control asistido por ordenador de la potencia en una red de distribución eléctrica.
(24/10/2018) Procedimiento para el control asistido por ordenador de la potencia en una red de distribución eléctrica, en donde la red de distribución presenta una frecuencia nominal predeterminada y comprende una pluralidad de nodos de red (N1, N2, ..., N5) conectados entre sí a través de líneas de corriente (PL), que alimentan respectivamente potencia en la red de distribución o la toman de la red de distribución, en donde la potencia alimentada o tomada en los nodos de red (N1, N2, ..., N5) correspondientes se da a través de una relación de proporcionalidad, según la cual, en un rango de frecuencia predeterminado de las tensiones en el nodo de red (N1, N2, ..., N5) correspondiente, la potencia se ajusta en base a una potencia de referencia (P10, ..., P50), que es…
Sistema y procedimiento de control de una máquina.
(21/02/2018) Un sistema de control de una máquina , que comprende:
a. una señal de entrada, en el que la señal de entrada lleva un parámetro operativo deseado de la máquina ;
b. una primera señal de parámetro, en el que la primera señal de parámetro lleva un parámetro medido de la máquina tomado en un primer momento;
c. un primer controlador , en el que durante un primer ciclo, el primer controlador recibe la señal de entrada y la primera señal de parámetro y genera una señal de control hacia la máquina en base a la señal de entrada y a la primera señal de parámetro:
caracterizado porque el sistema comprende además:
d. un segundo controlador…
Sistema de control de excitación digital para un generador eléctrico y un procedimiento de uso asociado.
(20/12/2017) Un sistema de autoajuste de un controlador PID utilizado con un excitador con un voltaje de campo del excitador conectado eléctricamente a un regulador de voltaje con un voltaje de salida del campo del excitador y un generador que está energizado eléctricamente por el excitador y tiene una tensión de salida del generador, el sistema comprende: medios para proporcionar un regulador de voltaje incluyendo una fuente de energía que produce la salida del voltaje de campo del excitador y un procesador configurado para actuar como un controlador PID; el procesador además configurado para calcular una ganancia del sistema de la tensión de salida del generador, una tensión residual y la tensión de salida de campo del excitador; el procesador además configurado para calcular una constante de tiempo estimada del excitador…
Robot con articulaciones de rigidez variable y procedimiento de cálculo de dicha rigidez optimizada.
(22/11/2017) Robot dotado de capacidades de desplazamiento en al menos una cadena articulada que comprende, al menos, un sensor de contacto del extremo de dicha cadena con la superficie de desplazamiento, comprendiendo dicha cadena al menos una articulación , controlada dicha articulación por un motor eléctrico controlado por una instrucción de posición y/o velocidad y por medios de limitación de la corriente y/o del par aplicado por dicho motor a dicha articulación, caracterizándose dicho robot porque comprende también:
a) una primera lógica de cálculo del par articular como siendo solución de una ecuación que modela el equilibrio dinámico del robot entre, por una parte, la suma de la diferencia de las fuerzas inerciales debidas a la aceleración angular de la articulación y de la aceleración de la gravedad y del efecto de las fuerzas de Coriolis…
Planta de desalación de agua por ósmosis inversa.
(11/10/2017) Planta de desalación de agua por ósmosis inversa, que comprende:
- una unidad de membrana de ósmosis inversa (TP),
- al menos una bomba de alta presión (HP) para presurizar al menos una primera parte del agua a tratar a una presión superior a su presión osmótica y enviarla a la entrada de la unidad de membrana,
- un medio de regulación del caudal de la bomba de alta presión, comprendiendo este medio una válvula regulable instalada en la salida de la bomba de alta presión y/o un motor impulsor de la bomba de velocidad variable ,
- un recuperador de energía (SRE) de tipo de intercambio de presión adecuado para transferir la presión del concentrado que sale…
Sistemas y procedimientos para optimizar la operación de un parque eólico.
(14/06/2017) Un procedimiento para optimizar la operación de un parque eólico, que comprende:
recibir nuevos valores que corresponden a al menos algunos parámetros de estela para turbinas eólicas en el parque eólico;
identificar nuevos conjuntos de turbinas eólicas interactivas desde las turbinas eólicas basadas en los nuevos valores;
desarrollar un modelo de estela predictivo a nivel de parque para los nuevos conjuntos de turbinas eólicas interactivas basándose en los nuevos valores y modelos de estela interactivos determinados usando valores históricos de los parámetros de estela que corresponden a los conjuntos de referencia de turbinas eólicas interactivas en el parque eólico; y
ajustar uno o más ajustes de control para al menos los nuevos conjuntos de turbinas…
Bomba de descarga centrífuga con rodete de álabes para lavadoras o aparatos electrodomésticos similares.
(26/10/2016) Bomba de descarga centrífuga para aparatos electrodomésticos, que comprende: una cámara de trabajo que tiene una abertura de admisión y una abertura de distribución ; un rodete abierto dispuesto en el interior de dicha cámara de trabajo y giratorio en torno a un eje principal (x) para desplazar una corriente de descarga del aparato electrodoméstico procedente de la abertura de admisión a través de la abertura de distribución ; y un medio motriz diseñado para accionar dicho rodete mediante un árbol de transmisión dispuesto a lo largo de dicho eje principal (x); comprendiendo dicho rodete un elemento de soporte dispuesto en un plano perpendicular al eje principal (x) y solidario con el árbol de transmisión , y una pluralidad de álabes que se proyectan desde dicho elemento de soporte , teniendo dicho rodete…
Método para determinar parámetros hidráulicos en una bomba de desplazamiento positivo.
(06/07/2016) Método para determinar parámetros hidráulicos en un sistema hidráulico con una bomba de desplazamiento positivo, que está unida a una tubería de aspiración y a una tubería bajo presión, donde la bomba de desplazamiento positivo presenta un elemento desplazador móvil, que limita la cámara de dosificación, la cual está unida mediante válvulas con la tubería de aspiración y la tubería bajo presión, de modo que por medio de un movimiento oscilante del elemento desplazador aspira alternativamente fluido a transportar a través de la tubería de aspiración a la cámara de dosificación y a través de la tubería bajo presión puede ejercerse una presión a partir de la cámara de dosificación, habiéndose previsto un accionamiento para el movimiento oscilante del elemento…
Modelización adaptativa de estados cambiados en la monitorización de condición predictiva.
(30/03/2016) Un procedimiento de adaptación de un modelo empírico, utilizado en la monitorización de un sistema, que comprende las etapas de:
a) recibir, en un módulo de decisión de adaptación , valores reales de parámetros que comprenden instantáneas actuales de parámetros operativos monitorizados que caracterizan un estado operativo del sistema monitorizado;
b) el módulo de decisión de adaptación determina en base a un operador de similitud global si la instantánea actual de los datos del sensor procedentes del sistema representa una molestia para el proceso o un fallo del sensor, o representa el inicio de una transición a un nuevo estado operativo del sistema monitorizado;
c) si se reconoce una transición…
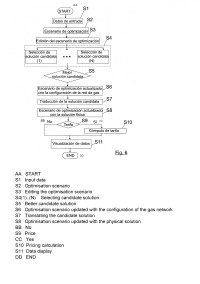
SISTEMA Y PROCEDIMIENTO DE OPTIMIZACIÓN DE LA GESTIÓN DE UNA RED DE TRANSPORTE DE GAS.
(21/05/2015). Ver ilustración. Solicitante/s: REGASIFICADORA DEL NORESTE, S.A. Inventor/es: ABUÍN MOSQUERA,José Manuel, BERMÚDEZ DE CASTOR LÓPEZ-VARELA,Alfredo, GONZÁLEZ DÍAZ,Julio, GONZÁLEZ DIEGUEZ,Francisco José, GONZÁLEZ RUEDA,Ángel Manuel, RAÑA MÍGUEZ,Paula.
Sistema y procedimiento de optimización de la gestión de una red de transporte de gas. El sistema comprende: - un sistema de entrada para generar un escenario de optimización con la topología, variables de diseño, parámetros de control, rangos de operación y disposición de consumos de la red; - un sistema informático de optimización de la red de transporte de gas con un módulo de optimización que dispone de modelos físicos que reproducen el comportamiento del gas y los elementos de la red, encargado de: ¿ relajar los modelos físicos para obtener una solución candidata que resuelva el problema físico aproximado según restricciones del escenario de optimización y objetivos de optimización, ¿ transformar la solución candidata en una solución que se ajuste a la física real del problema. El sistema puede comprender un módulo tarifario para calcular costes de transporte de la red.
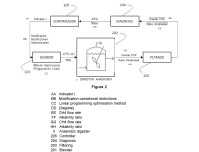
PROCEDIMIENTO Y PRODUCTO DE PROGRAMA INFORMÁTICO PARA EL CONTROL DE CODIGESTORES ANAEROBIOS.
(23/04/2015). Ver ilustración. Solicitante/s: UNIVERSIDADE DE SANTIAGO DE COMPOSTELA. Inventor/es: LEMA RODICIO,JUAN MANUEL, GARCÍA GEN,Santiago, RODRÍGUEZ RODRÍGUEZ,Jorge.
Procedimiento y producto de programa informático para el control de codigestores anaerobios. La codigestión anaerobia de sustratos múltiples permite potenciar la producción de metano así como la calidad del gas y el digerido si se utilizan adecuadamente las características complementarias de los diferentes residuos. Para ello, es necesario definir una mezcla óptima que maximice la conversión de DQO a metano sin causar desestabilizaciones en el digestor. La presente invención propone una estrategia de control que por un lado calcula la mezcla óptima de la alimentación mediante optimización por programación lineal, y por otro, mantiene la estabilidad del sistema siguiendo un parámetro fisicoquímico del proceso (relación de alcalinidades).
Método de control del accionamiento de un brazo robótico y brazo robótico que utiliza dicho método.
(19/02/2015) Método de control del accionamiento de un brazo robótico y brazo robótico que utiliza dicho método.
Método de control del accionamiento de un brazo robótico que comprende las siguientes etapas: a) mover el brazo robótico mediante una acción programada en un controlador; b) medir la fuerza que el brazo robótico realiza en determinados puntos del movimiento de la etapa a); c) comparar la fuerza ejercida en cada uno de los puntos de la etapa b) con datos de un perfil de fuerza almacenados en el controlador; d) como resultado de la comparación del punto c), generar una señal de alarma si la fuerza medida en la etapa b), se encuentra fuera de los límites definidos en…
Procedimiento y producto de programa informático para el control de codigestores anaerobios.
(30/10/2014) Procedimiento y producto de programa informático para el control de codigestores anaerobios. La codigestión anaerobia de sustratos múltiples permite potenciar la producción de metano así como la calidad del gas y el digerido si se utilizan adecuadamente las características complementarias de los diferentes residuos. Para ello, es necesario definir una mezcla óptima que maximice la conversión de DQO a metano sin causar desestabilizaciones en el digestor. La presente invención propone una estrategia de control que por un lado calcula la mezcla óptima de la alimentación mediante optimización por programación lineal, y por otro, mantiene la estabilidad del sistema siguiendo un parámetro fisicoquímico del proceso (relación de alcalinidades).
Mejoras en y en relación con dispositivos de gestión de vehículos.
(22/10/2014) Un dispositivo de supervisión de vehículos que comprende un microprocesador programado para simular un tren de potencia de un vehículo y dispuesto para recibir señales desde el sistema de gestión del motor de un vehículo para producir un modelo simulado en tiempo real del funcionamiento del tren de potencia del vehículo de donde el consumo de combustible y/o las emisiones instantáneas y actuales del vehículo pueden predecirse con precisión durante el funcionamiento del vehículo y compararse con características de rendimiento óptimo predeterminadas para el tren de potencia en condiciones asociadas para mostrar las condiciones operativas…
Procedimiento y dispositivo para el funcionamiento de un motor eléctrico.
(16/04/2014) Procedimiento para el funcionamiento de una máquina eléctrica polifásica a través de la aplicación de tensiones de fases (Ux) variables con las siguientes etapas:
- preparación de un perfil de la corriente de fases, que indica para cada fase de la máquina eléctrica una curva dependiente de la posición del rotor de la corriente de fases respectiva (Ix);
- cálculo de la tensión de fases (Ux) constante a aplicar durante una ventana de tiempo predeterminada para cada fase en función de una indicación de la corriente de fases, que indica un desarrollo linealizado de la corriente de fases (Ix) a aplicar entre la corriente de fases (Ix) predeterminada a través del perfil de la corriente…
Método y dispositivo para ajuste y control.
(06/11/2013) Un método para ajustar un controlador que controla una propiedad (p(t)) de un proceso industrial que tieneun caudal de materiales variable, pero conocido, cuyo método comprende:
- la inyección de señales de excitación añadidas a la señal de salida del controlador (U(t)),
- la recepción de medidas (z(t)) de dicha propiedad en respuesta a dichas señales de excitación,
- la selección de una primera estructura de modelo de proceso que comprende uno o varios parámetrosdesconocidos,
- la estimación del valor de dichos uno o más parámetros desconocidos, basándose en dichas medidas (z(t)) dedicha propiedad y en una señal…
MÉTODO Y SISTEMA DE GUIADO MEDIANTE CONTROL POR DERIVADA.
(14/02/2013) Método y sistema de guiado de aplicación al control de variables de procesos monovariables o multivariables, con parámetros conocidos o desconocidos y variables con el tiempo. El sistema de guiado de la presente invención genera una trayectoria deseada para una variable de salida del proceso y, a partir de dicha trayectoria deseada, calcula una consigna para la variable derivada de dicha variable de salida del proceso. Dicha consigna es entonces aplicada a un controlador avanzado basado en modelo de dicha variable derivada y la acción de control generada por dicho controlador avanzado basado en modelo es aplicada al proceso y guía su evolución de forma que dicha variable de salida del proceso converge hacia dicha trayectoria deseada.
METODO Y SISTEMA DE GUIADO MEDIANTE CONTROL POR DERIVADA.
(03/01/2013). Ver ilustración. Solicitante/s: UNIVERSIDAD NACIONAL DE EDUCACION A DISTANCIA.. Inventor/es: MARTIN SANCHEZ,JUAN MANUEL, VIUDEZ MOREIRAS,Daniel, NEVADO REVIRIEGO, Antonio.
Método y sistema de guiado de aplicación al control de variables de procesos monovariables o multivariables, con parámetros conocidos o desconocidos y variables con el tiempo. El sistema de guiado de la presente invención genera una trayectoria deseada para una variable de salida del proceso y, a partir de dicha trayectoria deseada, calcula una consigna para la variable derivada de dicha variable de salida del proceso. Dicha consigna es entonces aplicada a un controlador avanzado basado en modelo de dicha variable derivada y la acción de control generada por dicho controlador avanzado basado en modelo es aplicada al proceso y guía su evolución de forma que dicha variable de salida del proceso converge hacia dicha trayectoria deseada.
Método de controlar un proceso de ácido acético.
(23/05/2012) Un método de controlar un proceso para producir ácido acético mediante carbonilación de metanol o underivado carbonilable del mismo, que comprende los pasos de:
monitorizar la velocidad de producción del ácido acético; reducir la velocidad de producción en respuesta a uncambio en las condiciones operativas fuera de un intervalo operativo normal; después de haber reducido lavelocidad de producción, controlar el proceso a la velocidad de producción reducida; y aumentar la velocidadde producción después de haber abordado dicho cambio en las condiciones operativas hasta que al menos lavelocidad de producción vuelva a dicho intervalo operativo normal; en donde durante al menos uno de…
{kind=link}
{kind=link}
{kind=link}