CIP-2021 : B66C 13/08 : para depositar las cargas según una orientación o en una posición dadas.
CIP-2021 › B › B66 › B66C › B66C 13/00 › B66C 13/08[2] › para depositar las cargas según una orientación o en una posición dadas.
Notas[g] desde B66C 5/00 hasta B66C 15/00: Otras características comunes; Detalles
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B66 ELEVACION; LEVANTAMIENTO; REMOLCADO.
B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21).
B66C 13/00 Otras características de estructura o detalles.
B66C 13/08 · · para depositar las cargas según una orientación o en una posición dadas.
CIP2021: Invenciones publicadas en esta sección.
Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua.
(27/05/2020) Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer medio de izado (3') y un segundo medio de izado (3'') dispuestos sobre o cerca del buque, estando al menos un primer bastidor anti torsión (ATF) (4, 4') conectado a un extremo inferior (5') de un primer cable de izado (27') del primer medio de izado, estando el objeto fijado al extremo inferior del primer cable de izado, por debajo del ATF, que comprende las etapas de:
a) el ajuste del rumbo del buque de manera que el buque esté sustancialmente alineado con la dirección del viento / las olas / las marejadas ,
b) el descenso de este objeto…
Flujo de video modificado para soportar el control remoto de una grúa de contenedores.
(18/12/2019). Solicitante/s: ABB SCHWEIZ AG. Inventor/es: ZANARINI,ALESSANDRO, HOLMBERG,BJÖRN, SCHMITT,SUSANNE.
Un procedimiento para soportar el control remoto de una grúa de contenedores , estando configurada la grúa de contenedores para desplazar contenedores de una posición a otra, siendo el procedimiento llevado a cabo en un sistema de control de grúa de contenedores , y comprendiendo las etapas de:
recibir información de órdenes de trabajo, especificando cada orden de trabajo la posición de un contenedor a recoger y el destino del contenedor a colocar;
obtener un primer flujo de video de imágenes de una posición de recogida;
identificar el contenedor a recoger en las imágenes del primer flujo de video;
modificar las imágenes del primer flujo de video, lo que comprende destacar el contenedor a recoger; y
presentar en una pantalla el flujo de video modificado de imágenes.
PDF original: ES-2773051_T3.pdf
Control de grúa automatizado teniendo en cuenta errores de medición que dependen del objeto de carga y de la posición.
(05/11/2019) Procedimiento de control para un sistema de transbordo que comprende una grúa pórtico para contenedores dispuesta sobre un suelo con un carro de grúa que puede desplazarse sobre un travesaño de la grúa pórtico para contenedores con respecto al suelo y al menos un punto de transbordo de objeto de carga dispuesto sobre el suelo ,
- en el que un control de grúa , teniendo en cuenta al menos una carga de destino (L), con el que el carro de grúa está cargado en su lugar de destino (xK), adapta un lugar de destino (xK) del carro de grúa relacionado con el travesaño y un lugar de destino (xL) del punto de transbordo de objeto de carga relacionado con el suelo…
Método para hacer funcionar al menos dos dispositivos de elevación en grupo, y conjunto que comprende al menos dos dispositivos de elevación.
(04/09/2019) Método para operar al menos dos engranajes de elevación en una operación grupal, en donde cada equipo de elevación tiene un polipasto, a través del cual un respectivo medio de levantamiento de carga puede elevarse mediante un procedimiento de elevación o puede bajarse mediante un procedimiento de descenso, en el que la operación grupal, en un modo de funcionamiento síncrono, en primer lugar un procedimiento de elevación común se lleva a cabo mediante al menos dos polipastos para mover una carga sujeta a los medios de recogida de carga, después del procedimiento de levantamiento común, para cambiar de la operación síncrona a una operación individual o una operación múltiple, al menos uno de los polipastos involucrados en el procedimiento…
(17/07/2019). Solicitante/s: Hans Künz GmbH. Inventor/es: BEER,ROMAN.
Instalación de transporte para el transporte de al menos un contenedor o de otra carga, en la que la instalación de transporte presenta al menos un carro y al menos un dispositivo de alojamiento de la carga y al menos otro cables elevadores , y el dispositivo de alojamiento de la carga presenta instalaciones de unión para la fijación del contenedor o de otra carga y cuelga de manera que se puede subir y bajar por medio de los cables elevadores en el carro , en la que los cables elevadores se pueden enrollar sobre tambores de cables alojados giratorios en el carro , y cada cable elevador se pueden enrollar sobre un tambor de cable propio y/o se puede enrollar al menos en parte, caracterizada por que en todos los tambores de cables se pueden ajustar individualmente, respectivamente, el número de revolucione y/o en sentido de giro.
PDF original: ES-2747429_T3.pdf
Grúa de torre y procedimiento para el montaje de una pala de rotor de turbina eólica.
(22/05/2019). Solicitante/s: LIEBHERR-WERK BIBERACH GMBH. Inventor/es: EIWAN,CHRISTOPH, STANGER,NORBERT,DR, HERSE,Thomas.
Grúa de torre con un torre compuesta de al menos un elemento de torre, en particular una pieza de rejilla, y preferentemente con un elemento de arriostramiento estructural con al menos una barra de arriostramiento para el anclaje horizontal de la torre en una estructura, caracterizada por que un bastidor de guía está dispuesto de manera desplazable en vertical en la torre y por que al menos un cable de posicionamiento está fijado de manera ajustable en el bastidor de guía , por que están previstas dos guías de cable para el desplazamiento del bastidor de guía , que se pueden ajustar mediante un cabrestante de doble cable con dos tambores de cable, por que el bastidor de guía tiene forma de U, de modo que rodea la torre en tres lados, y por que el bastidor de guía en U está acodado en su extremo abierto para rodear las zonas de esquina de la torre.
PDF original: ES-2743181_T3.pdf
Procedimiento de control para un sistema de grúa que incluye una viga de separación.
(08/05/2019). Solicitante/s: Nissan Motor Manufacturing Ltd. Inventor/es: MCLAUGHLIN,STEVE.
Un procedimiento para detectar una condición de fallo en un sistema de grúa, el sistema de grúa que comprende una viga de separación para elevar una carga, comprendiendo la viga de separación al menos dos puntos de carga, estando dispuesto cada punto de carga para soportar una porción respectiva de la carga, comprendiendo el procedimiento:
monitorizar las cargas respectivas aplicadas a cada uno de los puntos de carga;
analizar las cargas para determinar si el sistema de grúa está operando fuera de uno o más intervalos de carga aceptables;
monitorizar una inclinación de la viga de separación con respecto a un plano horizontal;
comparar la inclinación con un umbral de inclinación para determinar si el sistema de grúa está operando fuera del umbral de inclinación; y
determinar la existencia de una condición de fallo si el sistema de grúa está operando fuera del umbral de inclinación o de al menos uno de los intervalos de carga aceptables.
PDF original: ES-2740781_T3.pdf
Agarradera para aparato de manipulación de carga y grúa.
(14/03/2019). Solicitante/s: KONECRANES GLOBAL CORPORATION. Inventor/es: MANNARI,VILLE, NIEMINEN,ARI, LEHTIÖ,JUSSI.
Una agarradera para un aparato de manipulación de carga, que comprende un dispositivo de medición de la distancia óptica y medios de sujeción (106, 206, 306a-c) que sujetan el dispositivo de medición de la distancia óptica de una manera flexible a la agarradera,
caracterizada porque los medios de sujeción (106, 206, 306a-c) comprenden una parte superior y al menos dos partes de soporte (214a, 214b, 314a-d) que se extienden hacia abajo desde la parte superior en una dirección vertical y que tienen en sus extremos inferiores partes flexibles (216a-b, 306a-c), el dispositivo de medición de la distancia óptica está sujeto a los medios de sujeción (106, 206, 306a-c) por dichas partes flexibles (216a-b, 306a-c).
PDF original: ES-2704053_T3.pdf
Manejo de carga con un esparcidor.
(06/03/2019). Solicitante/s: KONECRANES GLOBAL CORPORATION. Inventor/es: MANNARI,VILLE, NIEMINEN,ARI.
Un procedimiento de manejo de carga con un esparcidor que incluye un sensor de distancia (308a, 308b) que transmite señales ópticas, comprendiendo el procedimiento:
manejar una carga que incluye una pluralidad de lados interconectados (312a, 312b);
seleccionar direcciones para transmitir señales ópticas;
medir distancias mediante señales ópticas reflejadas transmitidas en las direcciones seleccionadas;
caracterizado porque el procedimiento comprende determinar, en base a las distancias medidas, una línea de referencia que coincide con una forma de al menos uno de los lados interconectados (312a, 312b) de la carga para compensar un movimiento del sensor de distancia.
PDF original: ES-2702902_T3.pdf
Aparato y método para posicionar y orientar una carga.
(30/01/2019) Un aparato para posicionar y orientar una carga, comprendiendo el aparato:
- una estructura de soporte (101a, 101b, 101c) movible en una primera dirección, la estructura de soporte establece un área dentro de la cual la carga puede posicionarse y orientarse;
- un sistema de elementos tensores que comprende:
- al menos seis cabrestantes montados en la estructura de soporte ; y
- al menos seis elementos tensores , estando un primer extremo de cada uno de los al menos seis elementos tensores conectado a uno respectivo de los al menos seis cabrestantes ;
- un mecanismo de elevación montado en la estructura de soporte…
Método y sistema para levantar y manipular una carga.
(29/11/2017). Solicitante/s: FOSTER WHEELER USA CORPORATION. Inventor/es: MEYER,WILLIAM.
Un sistema para levantar y manipular una carga, comprendiendo el sistema:
una grúa pórtico que comprende:
un raíl de soporte :
un pórtico de soporte ; y
una viga de pórtico acoplada al raíl de soporte y la pórtico de soporte ;
caracterizado por que comprende:
una plataforma de levantamiento fijada a la viga de pórtico , en la que la plataforma de levantamiento incluye una porción sustancialmente vertical que se acopla con el raíl de soporte ;
un dispositivo de levantamiento dispuesto con la plataforma de levantamiento , y
en el que al menos una porción de la carga es transmitida, por medio de la porción sustancialmente vertical al raíl de soporte aumentando, de este modo, una capacidad de levantamiento segura de la grúa pórtico.
PDF original: ES-2660473_T3.pdf
Método para controlar la orientación de una carga de grúa y una grúa de pescante.
(16/08/2017). Solicitante/s: LIEBHERR-WERK NENZING GMBH. Inventor/es: SAWODNY, OLIVER, SCHNEIDER, KLAUS, ARNOLD,ECKHARD, SCHAPER,DI ULF.
Método para controlar la orientación de una carga de grúa, en donde un manipulador para manipular la carga se conecta a una unidad de rotador a un gancho suspendido sobre cuerdas y un ángulo ηL de inclinación de la carga se controla mediante una unidad de control de la grúa,
Por medio de la cual,
la unidad de control es una unidad de control adaptativa en donde un estado del sistema estimado del sistema de grúa se determina mediante el uso de un modelo no lineal que describe las dinámicas de inclinación durante la operación caracterizada porque la no linealidad del modelo que describe las dinámicas de inclinación se refiere a la relación no lineal entre el ángulo de giro ◊ ≥ η L - φ C - φ D y el torque T reactivo resultante, por medio del cual φ C y φ D respectivamente se refieren al ángulo entre la unidad de rotador y la carga y un ángulo de rotación de la grúa.
PDF original: ES-2647590_T3.pdf
Dispositivo de elevación y de giro.
(19/04/2017). Solicitante/s: J. SCHMALZ GMBH. Inventor/es: WEBER, ECKHARD, KLOBAS,MARK.
Dispositivo de elevación y de giro para elevar y girar una carga, en particular una nervadura de rotor , con un brazo de giro para la fijación de la carga, con un cuerpo de base , con una instalación de desplazamiento que puede ser desplazada en perpendicular axialmente frente al cuerpo de base , que está unida de manera giratoria al brazo de giro , y a al menos un brazo de palanca , que está unido al cuerpo de base y al brazo de giro de tal manera que el brazo de giro , al desplazarse la instalación de desplazamiento frente al cuerpo de base , se gira, caracterizado por que en el brazo de giro están previstos varios puntos de apoyo para la unión al brazo de palanca.
PDF original: ES-2625054_T3.pdf
Método para controlar una carga.
(12/10/2016) Un método para controlar la orientación de una carga suspendida, que comprende las etapas que consisten en:
- conectar un bastidor de elevación en el que se disponen dos o más unidades de volante de inercia , las unidades de volantes de inercia comprenden cada una un volante de inercia rotativo dispuesto en un cardan que también se dispone de manera rotatoria en un soporte de cardan a lo largo de un eje de rotación perpendicular al eje de rotación del volante de inercia , en el que se dispone un motor eléctrico para controlar la velocidad y la dirección de rotación del volante de inercia y un motor 10 basculante se dispone para inclinar el cardan mediante la rotación del…
Procedimiento para controlar la orientación de una carga de grúa.
(21/09/2016) Procedimiento para controlar la orientación de una carga de grúa, en el que un manipulador para manipular la carga está unido mediante un dispositivo rotador con un gancho suspendido de cuerdas y el ángulo de giro φL de la carga se controla mediante un dispositivo de control con ayuda del momento de inercia JL de la carga como parámetro más importante, siendo el dispositivo de control un dispositivo de control adaptivo, determinándose el momento de inercia JL de la carga durante el funcionamiento de la grúa basándose en al menos uno de los siguientes parámetros mediante medición del estado del sistema: ángulo de giro φH del gancho, ángulo de giro φL de la carga, variación φH del ángulo de giro φH del gancho y/o la variación del ángulo de giro φL de la carga, caracterizado por que se usa un giroscopio para obtener…
Aparato y procedimiento para controlar la orientación de una carga suspendida.
(31/08/2016). Solicitante/s: Torquer Limited. Inventor/es: JAMIESON,ANGUS.
Aparato para controlar la orientación de una carga suspendida, caracterizado por que el aparato comprende:
una tubería de circuito cerrado que contiene un volumen de fluido que puede unirse a una carga suspendida ;
por lo menos una bomba para hacer circular el volumen de fluido en la tubería; y
una unidad de control operativa para recibir por lo menos una señal de dirección de entrada;
en el que la unidad de control está configurada para generar una señal de control a dicha por lo menos una bomba para controlar el flujo del volumen de fluido en la tubería e impartir de ese modo una fuerza de rotación a la tubería.
PDF original: ES-2661251_T3.pdf
Método y dispositivo para posicionar una carga de grúa en suspensión.
(25/05/2016) Método para posicionar una carga de grúa , que cuelga de una suspensión por cable de un equipo de grúa , en dirección de rotación alrededor de su eje vertical , en el que un ángulo de rotación de la carga de grúa se cambia por medio de un mecanismo de giro , en el que en el cambio del ángulo de giro de la carga de grúa se utilizan como magnitudes de entrada para la regulación del mecanismo de giro el ángulo de giro absoluto de un medio de recepción de carga , que corresponde al lado de la carga de grúa, del equipo de grúa y la posición angular del mecanismo de giro , en el que un ángulo de giro de la carga de grúa se cambia por medio de predeterminación manual de un valor prefijado de velocidad de giro para el mecanismo…
Medio de suspensión de carga.
(04/05/2016). Solicitante/s: GKS Stahl- und Maschinenbau GmbH. Inventor/es: SÖREN,FRANKE.
Medio de suspensión de carga para el manejo de un objeto a ser elevado mediante una instalación elevadora similar a una grúa, en el que el medio de suspensión de carga presenta un alojamiento para disponer el medio de suspensión de carga en la instalación elevadora, así como varios medios de tracción para disponer el objeto a ser elevado en el medio de suspensión de carga , tiene por lo menos dos cuerpos de rotación apoyados de manera giratoria, enclavables y que guían a los medios de tracción , en los que respectivamente se encuentra sujetado por lo menos un medio de tracción , y los cuerpos de rotación pueden controlarse en el mismo sentido o en sentidos contrarios mediante un accionamiento.
PDF original: ES-2662928_T3.pdf
Método para la determinación óptica, automática, de una posición objetivo para un dispositivo de elevación de contenedores.
(30/03/2016) Método para posicionar un dispositivo de elevación de contenedores mediante un dispositivo de sujeción para contenedores , donde al menos una cámara 2D, como sensor que proporciona una imagen, está fijada en el dispositivo de elevación de contenedores con una parte saliente, y el sensor determina un área visual (A, B) orientada esencialmente de forma perpendicular hacia abajo, donde el sensor proporciona valores de medición desde un entorno del dispositivo de elevación de contenedores , en particular la vista superior del dispositivo de sujeción , a una unidad de cálculo, donde el dispositivo de sujeción presenta al menos una marca sobre su superficie, donde la unidad de cálculo forma datos a partir de los valores de medición, en base…
Procedimiento para influir en un movimiento de una carga soportada por una grúa.
(17/02/2016) Procedimiento para influir en un movimiento de una carga soportada por una grúa , en donde la carga está suspendida de la grúa a través de unos medios de fijación de tipo cable, de tal manera que respectivamente uno de entre al menos cuatro puntos de suspensión de grúa (K1, K2, K3, K4) previstos en la grúa está unido al menos a uno de entre cuatro puntos de suspensión de carga (C1, C2, C3, C4), previstos en la carga o en un medio de soporte de carga , a través de al menos un medio de fijación de tipo cable, y en donde los medios de fijación de tipo cable están unidos a unas instalaciones de ajuste , a través de las cuales…
Sistema de manipulación de componentes para su uso en turbinas eólicas y procedimientos de posicionamiento de un componente de tren motriz.
(11/03/2015) Un sistema de manipulación de componentes para su uso en una turbina eólica, incluyendo la turbina eólica un rotor , un conjunto de tren motriz soportado en un bastidor de soporte, y un eje motriz acoplado de manera giratoria entre el rotor y el conjunto de tren motriz, comprendiendo dicho sistema de manipulación de componentes:
un conjunto de elevación acoplado de forma desmontable a un componente del tren motriz y un dispositivo de elevación, estando dicho conjunto de elevación configurado para soportar el componente del dispositivo de elevación, comprendiendo dicho conjunto de elevación:
una pluralidad de patas de elevación que se extienden entre el componente y el dispositivo de elevación, teniendo cada pata de elevación de dicha…
Control de grúa, grúa y procedimiento.
(29/01/2015) Control de grúa para la activación de los mecanismos de regulación de una grúa que tiene al menos unos ramales de cable primero y segundo para elevar la carga , con una amortiguación de oscilaciones de carga para amortiguar oscilaciones pendulares esféricas de la carga , estando previstas unas unidades de sensor primera y segunda que están asignadas a los ramales de cable primero y segundo para la determinación de los respectivos ángulos de cable y/o velocidades de ángulo de cable, caracterizado porque la amortiguación de oscilaciones de carga tiene una regulación no lineal en la que entran los ángulos de cable y/o las velocidades de ángulo de cable determinados por las unidades de sensor primera y segunda, y basándose la regulación no lineal en la inversión…
Grúa con control de grúa.
(28/01/2015) Grúa con una pluma , un control de grúa y al menos un cable para elevar una carga , estando prevista en el control de grúa al menos una unidad de sensor para determinar un ángulo de cable con respecto a la dirección de la fuerza de gravedad, en la que la al menos una unidad de sensor está dispuesta en un elemento de seguimiento de cable y se guía en el cable , caracterizada porque la al menos una unidad de sensor dispuesta en el elemento de seguimiento de cable está conectada con éste a través de una conexión cardán con la pluma de la grúa.
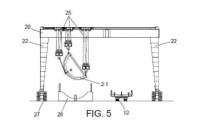
MÉTODO DE PREMONTAJE Y SISTEMA DE MANIPULACIÓN PARA LA TORRE DE UN AEROGENERADOR.
(08/01/2015). Ver ilustración. Solicitante/s: PACADAR S.A.U. Inventor/es: CIDONCHA ESCOBAR,MANUEL, MARTÍNEZ DE CASTAÑEDA,FRANCISCO JAVIER.
La invención se refiere a un método de premontaje de torres de aerogeneradores divididas en secciones, en el que cada sección está dividida en dovelas que son premontadas en posición horizontal. El método comprende los siguientes pasos desarrollados en el emplazamiento de la torre. Localización de un vehículo rodado bajo al menos un viga , conexión de una dovela a unos medios de elevación y giro conectados a la viga , elevación de la dovela sobre el vehículo rodado y giro la dovela alrededor de su eje longitudinal por los medios de elevación y giro hasta una posición de espera y repetición de los pasos con otra dovela y, finalmente, unión de las dos dovelas.
Conjunto de manipulación para contenedor de ensamblaje de combustible nuclear.
(07/01/2015) Conjunto de manipulación para contenedor de ensamblaje de combustible nuclear, del tipo que comprende una herramienta de izado del contenedor , comprendiendo la herramienta de izado un soporte de izado destinado a estar suspendido y un elemento de agarre de contenedor que comprende unos dispositivos de fijación amovible del contenedor en el elemento de agarre , estando el elemento de agarre montado de manera giratoria sobre el soporte de izado alrededor de un eje de rotación (H) sustancialmente horizontal cuando el soporte de izado está suspendido, siendo el elemento de agarre desplazable por rotación alrededor del eje de rotación…
Aparato de control de grúa.
(22/01/2014) Aparato de control de grúa para una grúa donde la carga está suspendida en un cable de grúa desde un punto desuspensión del cable de la grúa, que comprende un observador para estimar al menos la posición y/o velocidad dela carga desde al menos una entrada de detector de un primer detector al utilizar un modelo físico de la cargasuspendida en el cable de la grúa, caracterizado porque
El modelo físico del observador utiliza la posición de la carga y/o la velocidad de la carga como una variable deestado.
Dispositivo de manipulación de piezas.
(10/12/2013) Dispositivo de manipulación de piezas utilizado, en particular, para la elevación y rotación de hasta 360o de dichaspiezas, comprendiendo el dispositivo por lo menos una torre, la torre principal , y una torre satélite conectadamediante un tubo flexible de un dispositivo hidráulico, presentando cada torre una base de soporte ,caracterizado porque
cada una de las torres, la torre principal y la torre satélite , incluye:
- una columna telescópica cuya altura puede ser regulada mediante un dispositivo hidráulico que tieneun recorrido variable, que puede modificarse a voluntad y en función del tamaño de las piezas a manipular, y quetiene un sistema de límite de la carga que impide cualquier movimiento si la pieza a manipular tiene un peso mayorque la fuerza de elevación para la que están diseñadas…
Sistema y metodo para movimiento tridimensional de un objeto sujeto a una fuerza direccional.
(26/11/2013) Un sistema para facilitar el movimiento tridimensional de un objeto que comprende:
un conjunto no vacío de elementos de soporte de cordaje junto con un objeto ;
un cordaje X y un cordaje Y , unidos a una pluralidad de partes de dicho objeto y en dondedicho cordaje X y dicho cordaje Y están configurados para moverse a través de dicho conjunto novacío de elementos de soporte de cordaje ;
un dispositivo de movimiento X configurado para trasladar dicho cordaje X para efectuar elmovimiento X de dicho objeto , y,
un dispositivo de movimiento Y configurado para trasladar dicho cordaje Y para efectuar elmovimiento Y de dicho objeto ;
caracterizado porque el sistema comprende además:
un dispositivo de movimiento Z configurado para desplazar dicho cordaje X y dicho…
NIVELADOR DE CARGA AUTÓNOMO PARA GRÚAS ACCIONADO POR RADIOCONTROL, MEJORADO.
(08/07/2013) Nivelador de carga autónomo accionado por radiocontrol para grúas. Adición a la patente nacional P201001624.
La adición a la patente nacional P201001624 permite configurar un nivelador de carga autónomo para grúas accionado por radiocontrol para que pueda trabajar en distintos entornos especiales de trabajo: Se puede configurar un nivelador de carga autónomo para grúas accionado por radiocontrol para que haga su función tanto debajo del agua, obras interiores sin ventilación, minería, industrias alimentarias, industrias farmacéuticas, etc.
Dispositivo para dar la vuelta a una carga.
(28/06/2013) Dispositivo para dar la vuelta a una carga, con un mecanismo de elevación apoyado en un carro de grúa y desplazable a lo largo de un riel , que puede subir y bajar un primer elemento de soporte con un primergancho de carga , y con un segundo elemento de soporte , al menos de altura regulable, y dotado de unsegundo gancho de carga , suspendiéndose el segundo elemento de soporte de un mecanismo detraslación que se puede desplazar a lo largo del riel y que se ha configurado de manera que elmecanismo de traslación se apoye en el riel en su posición de marcha libre de carga a través de susruedas de rodadura , caracterizado…
Procedimiento de trabajo para dar la vuelta a una carga suspendida.
(24/06/2013) Dispositivo para dar la vuelta a una carga con un primer elemento de soporte alque sube y baja un aparejo dotado de un primer gancho de carga , y con unmecanismo de elevación accionado por un motor de elevación a través del cualse puede regular la altura de un segundo elemento de soporte dotado de un segundogancho de carga , suspendiéndose la carga en un primer punto de sujeción (a) delprimer gancho de carga y/o en un segundo punto de sujeción (b) distanciado delprimer punto de sujeción (a) del segundo gancho de carga , pudiéndose dar la vuelta ala carga a través de movimientos relativos del primer gancho de…
Dispositivo de control de carga para una grúa.
(19/04/2013) Un dispositivo de control de carga para controlar el movimiento de una carga suspendida de una grúa decontenedores, comprendiendo dicha grúa una carro , un spreader y líneas de carga dispuestas ensuspensión en cuatro puntos (4a - 4d) para elevar una carga, y un sensor óptico para detectar la posición de ladeflexión de un eje ortogonal (X, Y, V) de un contenedor suspendido bajo el spreader, con referencia a una líneacentral imaginaria (XL, YW, VH) de dicho eje ortogonal del contenedor, donde dos o más accionamientos están dispuestos unidos al menos a una línea de carga, y dispuestos para desplazar al menos a uno de dichospuntos (4a - 4d) de suspensión, acercándolo o alejándolo de dicha línea central imaginaria (XL, YW, VH) acortandoy/o alargando al menos una línea de carga, y hay dispuesto…
{kind=link}