Procedimiento para determinar datos de posición de un objeto objetivo en un sistema de referencia.
Procedimiento para determinar los datos de posición de un objeto objetivo (Z) en un sistema de referencia desde una posición de observación separada del mismo,
que comprende las etapas de:
a) proporcionar un modelo de referencia tridimensional del territorio circundante del objeto objetivo (Z) con datos de ubicación geográfica conocidos;
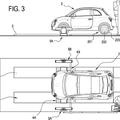
b) cotejar una imagen del objeto objetivo (Z) y su territorio circundante resultante de la posición de observación de un observador, donde la imagen es suministrada por un dispositivo de captura de imágenes (10) de un dispositivo de reconocimiento (1) con el modelo de referencia tridimensional;
c) determinar los datos de posición del objeto objetivo visado (Z) en el modelo de referencia como datos de posición relativa a los datos de ubicación conocidos del modelo de referencia tridimensional mediante un dispositivo informático del dispositivo de reconocimiento (1); y
d) transmitir los datos de posición relativa a un misil para la instrucción del mismo,
donde la alineación de la imagen del objeto objetivo (Z) y su territorio circundante con el modelo de referencia en la etapa b) se lleva a cabo en las siguientes subetapas:
b1) formar un modelo de línea tridimensional a partir del modelo de referencia tridimensional;
b2) proyectar el modelo de línea en la imagen del objeto objetivo (Z) y su territorio circundante tomada por un dispositivo de captura de imágenes basado en una hipótesis sobre la posición y la ubicación aproximadas;
b3) cotejar las líneas del modelo de línea tridimensional con los segmentos de línea extraídos de la imagen; y
b4) calcular una corrección de la hipótesis de posición y ubicación a partir del ajuste
donde la corrección determinada en la etapa b4) se tiene en cuenta en la determinación de los datos de posición del objeto objetivo (Z) en la etapa c).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11002853.
Solicitante: MBDA Deutschland GmbH.
Nacionalidad solicitante: Alemania.
Dirección: HAGENAUER FORST 27 86529 SCHROBENHAUSEN ALEMANIA.
Inventor/es: SCHWEYER, NIKOLAUS, HOLICKI,MICHAEL DR, ZOZ,JÜRGEN DR, SPETH,JOHANNES.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F41G3/02 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › F41G 3/00 Aparatos de puntería (dispositivos de mira F41G 1/00; determinación de la dirección, la distancia o la velocidad mediante ondas de radio u otras ondas G01S; computadores G06; antenas H01Q). › utilización de una línea de mira independiente, p. ej. telepuntería.
- F41G7/00 F41G […] › Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06).
- F41G7/22 F41G […] › F41G 7/00 Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06). › Sistemas de guiado por mecanismos que responden a alguna clase de emanación del blanco (Homing).
- G01S3/786 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › manteniéndose el estado deseado automáticamente.
- G06K9/32 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › G06K 9/00 Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00). › Alimentación o centrado del captador de imagen o de la zona de imagen.
PDF original: ES-2755024_T3.pdf
Patentes similares o relacionadas:
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Un sistema implementado por ordenador y procedimiento para extraer y reconocer caracteres alfanuméricos de señales de tráfico, del 15 de Abril de 2020, de Tata Consultancy Services Limited: Un sistema implementado por ordenador que tiene: (i) un repositorio configurado para almacenar una plantilla predeterminada que tiene secciones, caracteres alfanuméricos […]
Sistema y método de orientación automatizada para una máquina de movimientos coordinados, del 8 de Enero de 2020, de Recognition Robotics, Inc: Un método de orientación automatizada, que comprende: tomar una imagen inicial de una pluralidad de piezas de trabajo (Wa, Wb, Wc) de forma similar con una cámara […]
Aparato de procesamiento de imágenes, procedimiento de procesamiento de imágenes y programa, del 6 de Noviembre de 2019, de CANON KABUSHIKI KAISHA: Aparato de procesamiento de imágenes, que comprende: una unidad de adquisición de imágenes objetivo configurada para adquirir una imagen […]
 Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]
Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]
Dispositivo y procedimiento para determinar una diferencia de frecuencia de muestreo, del 10 de Julio de 2019, de Opticom, Dipl.-Ing. Michael Keyhl GmbH (100.0%): Dispositivo para la determinación de una diferencia de la frecuencia de muestreo entre una primera señal (IS1) de información y una segunda señal (IS2) de información, […]
Procedimiento para el control de un dispositivo de faros para un vehículo y dispositivo de faros, del 22 de Mayo de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para el control de un dispositivo de faros para un vehículo , presentando el dispositivo de faros dos faros separados , […]
PROCEDIMIENTO DE IDENTIFICACION DE OBJETOS REFLECTANTES SOMETIDOS A CONDICIONES DE ILUMINACION VARIABLE Y SISTEMA PARA LLEVAR A CABO DICHO PROCEDIMIENTO, del 18 de Agosto de 2011, de IMAGSA TECHNOLOGIES, S.A: Procedimiento de identificación de objetos reflectantes sometidos a condiciones de iluminación variable y sistema para llevar a cabo dicho procedimiento.Procedimiento […]