ROBOT PARA EL TRATAMIENTO ESTRUCTURAS METALICAS.
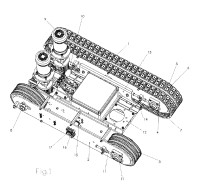
Robot para el tratamiento de estructuras metálicas, del tipo que comprende dos unidades de accionamiento por oruga (1) y desplazamiento mediante suelas magnéticas (5,
6) sobre una correa sinfín (4) y donde dichas unidades de accionamiento mediante oruga (1) están unidas longitudinalmente mediante dos bisagras intermedias (14) con un cuerpo central (12) y dos cuerpos laterales (13), en donde dichas bisagras intermedias (14) están configuradas para que cada unidad de accionamiento por oruga (1) oscile lateralmente con respecto a la oruga contraria y que comprende unos medios de articulación transversal (15,16,17) solidariamente unidos al chasis de soporte (2) y a los cuerpos laterales (13) configurados para que cada unidad de accionamiento por oruga (1) gire con respecto a la oruga contraria; y que además comprende unos medios de estabilización (18,19,20) del conjunto del robot configurados para mantener una presión constante y uniforme sobre la superficie de tratamiento.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2013/070604.
Solicitante: ELIOT SYSTEMS, S.L.
Nacionalidad solicitante: España.
Inventor/es: MASIA PERALES,Jordi.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D55/265 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00). › teniendo adherencia magnética o neumática.
Patentes similares o relacionadas:
Rueda magnética, del 19 de Febrero de 2020, de Tas Global Co., Ltd: Una rueda magnética que comprende: un bloque de equilibrio que incluye un cuerpo de bloque circular y una primera porción de marco que tiene un diámetro […]
Dispositivo de oruga, del 9 de Enero de 2019, de Tas Global Co., Ltd: Un dispositivo de oruga que comprende: una parte de eliminación de película de agua que se proporciona en un miembro (C) de transmisión de potencia que incluye […]
Plataforma Autopropulsada, del 10 de Diciembre de 2018, de SEGUÍ GÓMEZ, Ricardo: 1. Plataforma autopropulsada, para elevación de cargas en el fuste metálico de un aerogenerador o una estructura similar, caracterizada porque […]
ROBOT DE MANTENIMIENTO, del 26 de Mayo de 2017, de Tratamiento Superficial Robotizado, S. L: Robot para el mantenimiento de superficies aproximadamente verticales, con dispositivo para impedir el vuelco por cabeceo del robot al desplazarse por las […]
Sistema de montaje con seguimiento autónomo, del 12 de Abril de 2017, de THE BOEING COMPANY: Un dispositivo, que comprende: un dispositivo motorizado automatizado operable para moverse en una estructura para utilizarse […]
 Oruga de pared de vacío, del 9 de Marzo de 2016, de FORCE TECHNOLOGY: Una oruga de pared de vacío que tiene al menos una unidad de pista de vacío , que comprende:
- un bastidor de pista ;
- dos poleas provistas en […]
Oruga de pared de vacío, del 9 de Marzo de 2016, de FORCE TECHNOLOGY: Una oruga de pared de vacío que tiene al menos una unidad de pista de vacío , que comprende:
- un bastidor de pista ;
- dos poleas provistas en […]
 Robot de mantenimiento, del 22 de Diciembre de 2015, de Tratamiento Superficial Robotizado, S. L: Robot para el mantenimiento de superficies aproximadamente verticales, con dispositivo para impedir el vuelco por cabeceo del robot al desplazarse por las superficies verticales […]
Robot de mantenimiento, del 22 de Diciembre de 2015, de Tratamiento Superficial Robotizado, S. L: Robot para el mantenimiento de superficies aproximadamente verticales, con dispositivo para impedir el vuelco por cabeceo del robot al desplazarse por las superficies verticales […]
 ROBOT PARA TRATAR Y/O TRABAJAR SOBRE ESTRUCTURAS EXTERNAS DE ACERO, del 25 de Noviembre de 2009, de SIN ANDAMIOS ALMANSA, SL: Robot para tratar y/o trabajar superficies o partes externas de estructuras grandes de acero, dicho robot siendo del tipo con orugas para su desplazamiento […]
ROBOT PARA TRATAR Y/O TRABAJAR SOBRE ESTRUCTURAS EXTERNAS DE ACERO, del 25 de Noviembre de 2009, de SIN ANDAMIOS ALMANSA, SL: Robot para tratar y/o trabajar superficies o partes externas de estructuras grandes de acero, dicho robot siendo del tipo con orugas para su desplazamiento […]