Dispositivo y procedimiento para la determinación de la trayectoria de un blanco.
Dispositivo para determinar la posición de un blanco (50), especialmente metálico,
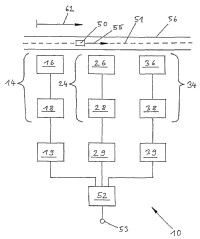
especialmente para realizar el procedimiento según una de las reivindicaciones 16 a 24, con un mínimo de dos dispositivos de detección (14, 24, 34) que están posicionados a lo lago de un trayecto a vigilar (51) de modo que las curvas de sensibilidad (15, 25, 35) de dispositivos de detección (24, 24, 34) inmediatamente contiguos se solapen al menos parcialmente, presentando los dispositivos de detección (14, 24, 34) cada uno por lo menos una inductividad (16, 26, 36) y por lo menos un oscilador (18, 28, 38), y en función de una distancia del blanco (50) con relación al respectivo dispositivo de detección (14, 24, 34) suministran una señal de distancia, con por lo menos un dispositivo de conversión (19, 29, 39, 59) que está en comunicación activa con los dispositivos de detección (14, 24, 34) para convertir las señales de distancia captadas respectivamente por los dispositivos de detección (14, 24, 34) en señales analógicas, en particular señales de intensidad y/o de tensión, y con por lo menos un dispositivo de evaluación (52) que está en comunicación activa con el dispositivo de conversión o los dispositivos de conversión (19, 29, 39, 59) para determinar y emitir una posición local del blanco (50), a partir de las señales analógicas debidas a los respectivos dispositivo de detección (14, 24, 34), donde por los dispositivos de detección (14, 24, 34) se puede emitir como señal de distancia respectivamente una señal de atenuación del oscilador, caracterizado porque una curva de atenuación de un dispositivo de detección (14, 24, 34) presenta respectivamente zonas parciales de alta resolución local, porque los dispositivos de detección (14, 24, 34) están dispuestos de tal modo que a partir de las zonas parciales de alta resolución local de los distintos dispositivos de detección (14, 24, 34) se puede componer una curva de detección para la totalidad del trayecto a vigilar, y para aumentar la resolución local los dispositivos de detección (14, 24, 34) están dispuestos en dos filas, en particular paralelas y respectivamente decalados entre sí.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2004/008454.
Solicitante: PEPPERL + FUCHS GMBH.
Nacionalidad solicitante: Alemania.
Dirección: LILIENTHALSTRASSE 200 68307 MANNHEIM ALEMANIA.
Inventor/es: FREUND,THOMAS, HOBEL,HEIKO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B7/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 7/00 Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos. › para la medida de la longitud, el ancho o el espesor (G01B 7/004, G01B 7/12 tiene prioridad).
- G01D5/20 G01 […] › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › mediante la variación de la inductancia, p. ej. mediante una armadura móvil.
- G01D5/22 G01D 5/00 […] › que influyen diferencialmente sobre dos bobinas.
Fragmento de la descripción:
Dispositivo y procedimiento para la determinación de la trayectoria de un blanco.
La presente invención se refiere a un dispositivo para la determinación de la posición de un blanco, especialmente metálico, conforme al preámbulo de la reivindicación 1. En otro aspecto, la invención se refiere a un procedimiento para determinar la posición de un blanco, especialmente metálico, conforme al preámbulo de la reivindicación 19.
Un dispositivo genérico presenta como mínimo dos dispositivos de detección que están posicionados a lo largo de una trayectoria que se trata de vigilar, de tal modo que las curvas de sensibilidad de dispositivos de detección inmediatamente contiguos se solapen al menos parcialmente, para lo cual los dispositivos de detección presentan como mínimo una inductividad y como mínimo un oscilador, y que dependiendo de la distancia del blanco al respectivo dispositivo de detección, suministran una señal de distancia. Un dispositivo genérico presenta además: como mínimo un dispositivo de conversión, que está en comunicación activa con los dispositivos de detección, para convertir las señales de distancia captadas por los respectivos dispositivos de detección en señales analógicas, así como por lo menos un dispositivo de evaluación que está en comunicación activa con el dispositivo de conversión o los dispositivos de conversión para determinar y emitir una posición de lugar del blanco a partir de las señales analógicas procedentes de los respectivos dispositivos de detección.
En el procedimiento genérico se posicionan como mínimo dos dispositivos de detección a lo largo de un trayecto que se trata de vigilar, de tal modo que las curvas de sensibilidad de dispositivos de detección inmediatamente contiguos se solapen al menos parcialmente, suministrando los dispositivos de detección una señal de distancia que depende respectivamente de la distancia al blanco. Además, las señales de distancia captadas respectivamente por los dispositivos de detección son convertidas en por lo menos un dispositivo de conversión en señales analógicas, en particular en señales de intensidad de corriente y/o tensión, y a partir de las diversas señales analógicas procedentes de los respectivos dispositivos de detección se determina la posición del blanco.
Esta clase de dispositivos se emplean en una multitud de procesos industriales dentro del campo de la automatización. También hay numerosas posibilidades de aplicación en el campo de la técnica automovilista. Por ejemplo se describe en el documento DE 102 04 453 A1 un captador de recorrido inductivo analógico mediante el cual se puede determinar el desplazamiento relativo entre un asiento de un vehículo y una carrocería del automóvil. En este caso sirve como principio de medida la variación de inducción magnética que se provoca durante un movimiento relativo de un cuerpo de ensayo de un material de alta permeabilidad magnética. Para el acoplamiento magnético se precisa por lo tanto un material ferromagnético, por lo que las posibilidades de utilización del captador inductivo de recorrido allí descrito son limitadas en cuanto al material del objeto o blanco a perseguir. En particular, los blancos ferromagnéticos con frecuencia son muy delicados mecánicamente.
Con vistas a la determinación concreta de las coordenadas del lugar de un blanco existe otro problema por el hecho de que las curvas de detección de los dispositivos de detección o sensores empleados generalmente no permiten una correspondencia unívoca entre un valor de medida y una posición definida del objeto con respecto al sensor. Esta clase de sensores, por ejemplo detectores de proximidad inductivos, suministran más bien para multitud de posiciones un mismo valor de medida, por ejemplo para dos puntos situados sobre una recta y opuestos entre sí con relación a un eje de simetría.
Para remediar el problema último citado se han empleado bobinas longitudinales basculadas. Pero como entonces la señal de detección depende mucho de la distancia, se pueden vigilar sólo unos recorridos muy limitados.
En el documento EP 1 306 649 A1 se describe una disposición de sensores para determinar una posición de giro o traslación, donde una pluralidad de bobinas primarias o secundarias están situadas a lo largo de un trayecto que se trata de vigilar. Para determinar la posición se recurre a la influencia electromagnética de las bobinas por parte del blanco.
El documento DE 101 30 572 A1 se refiere a un sensor de recorrido inductivo para determinar la posición de un elemento de influencia. Para obtener un sensor de recorrido inductivo con una longitud de construcción lo más reducida posible y al mismo tiempo gran precisión de medición, se propone allí reunir en un circuito una misma capacidad mediante un conmutador con una multitud de inductividades, dispuestas a lo largo del recorrido. Como efecto de la medición se emplea en este caso el efecto transformador, es decir la inducción de tensión en el elemento de influencia debido a las oscilaciones electromagnéticas en el respectivo circuito oscilante activado.
El objeto del documento DE 42 13 866 A1 es un sensor de posición para determinar movimientos lineales o rotativos con alta resolución. Para resolver el problema de facilitar un sensor robusto, que entre otras cosas permita un alto grado de resolución, se propone prever en el sensor un dispositivo para llevar a cabo un análisis de muestra que analice los valores característicos de las inductividades.
El documento DE 197 38 839 A1 se refiere a un sensor inductivo de ángulos. Para poder generar del modo más sencillo posible a partir de las señales de partida senoidales de las bobinas captadoras una señal de salida del sensor relacionadas linealmente con la posición del elemento rotor, se propone en este escrito un sensor de ángulos en el cual un dispositivo selector selecciona en función de las señales de salida momentáneas de una multitud de bobinas de captación, por lo menos una de las señales de salida y determina a partir de ésta la posición momentánea del elemento del rotor. El documento DE 31 00 486 da a conocer un dispositivo para la captación de la posición de un objeto metálico mediante varios sensores que están posicionados a lo largo de una trayectoria que se trata de vigilar y cuyas curvas de sensibilidad se solapan al menos parcialmente.
El objetivo de la invención es el de describir un dispositivo y un procedimiento para la captación de la trayectoria de un blanco, donde en comparación con las soluciones conocidas por el estado de la técnica exista un número considerablemente mayor de posibilidades de aplicación.
Este objetivo se resuelve mediante el dispositivo que presenta las características de la reivindicación 1 y mediante el procedimiento con las características de la reivindicación 16.
Realizaciones ventajosas del dispositivo conforme a la invención así como perfeccionamientos del procedimiento conforme a la invención constituyen el objeto de las reivindicaciones subsidiarias.
El dispositivo genérico está perfeccionado de acuerdo con la invención por el hecho de que los dispositivos de detección pueden emitir como señal de distancia sendas señales de atenuación del oscilador.
Como primera idea esencial de la invención se puede considerar que como principio de detección ya no se recurre, tal como sucede en el estado de la técnica, a la inducción provocada por un objeto de alta permeabilidad, es decir de un objeto ferromagnético, sino que se utiliza la atenuación de un oscilador causada por el blanco. Dado que esa atenuación en principio se puede justificar para un número cualquiera de objetos metálicos y no solo para objetos ferromagnéticos, se pueden perseguir en principio cualesquiera blancos metálicos, en particular también blancos metálicos robustos, por ejemplo de acero inoxidable. De este modo se amplía considerablemente el campo de aplicación en comparación con el estado de la técnica.
Como otra idea fundamental de la presente invención se puede considerar la colocación de una pluralidad de dispositivos de detección, es decir un mínimo de dos, a lo largo de una trayectoria a vigilar. De este modo no solamente se pueden vigilar en principio trayectorias de cualquier longitud y cualquier forma, sino que además se pueden eliminar eventuales ambigüedades de las señales de detección mediante una evaluación adecuada. Para ello se sitúan los dispositivos de detección conforme...
Reivindicaciones:
1. Dispositivo para determinar la posición de un blanco (50), especialmente metálico, especialmente para realizar el procedimiento según una de las reivindicaciones 16 a 24, con un mínimo de dos dispositivos de detección (14, 24, 34) que están posicionados a lo lago de un trayecto a vigilar (51) de modo que las curvas de sensibilidad (15, 25, 35) de dispositivos de detección (24, 24, 34) inmediatamente contiguos se solapen al menos parcialmente, presentando los dispositivos de detección (14, 24, 34) cada uno por lo menos una inductividad (16, 26, 36) y por lo menos un oscilador (18, 28, 38), y en función de una distancia del blanco (50) con relación al respectivo dispositivo de detección (14, 24, 34) suministran una señal de distancia, con por lo menos un dispositivo de conversión (19, 29, 39, 59) que está en comunicación activa con los dispositivos de detección (14, 24, 34) para convertir las señales de distancia captadas respectivamente por los dispositivos de detección (14, 24, 34) en señales analógicas, en particular señales de intensidad y/o de tensión, y con por lo menos un dispositivo de evaluación (52) que está en comunicación activa con el dispositivo de conversión o los dispositivos de conversión (19, 29, 39, 59) para determinar y emitir una posición local del blanco (50), a partir de las señales analógicas debidas a los respectivos dispositivo de detección (14, 24, 34),
donde por los dispositivos de detección (14, 24, 34) se puede emitir como señal de distancia respectivamente una señal de atenuación del oscilador,
caracterizado porque
una curva de atenuación de un dispositivo de detección (14, 24, 34) presenta respectivamente zonas parciales de alta resolución local,
porque los dispositivos de detección (14, 24, 34) están dispuestos de tal modo que a partir de las zonas parciales de alta resolución local de los distintos dispositivos de detección (14, 24, 34) se puede componer una curva de detección para la totalidad del trayecto a vigilar, y para aumentar la resolución local los dispositivos de detección (14, 24, 34) están dispuestos en dos filas, en particular paralelas y respectivamente decalados entre sí.
2. Dispositivo según la reivindicación 1
caracterizado porque
en las zonas parciales de alta resolución la resolución local es en todas partes superior al 10%, preferentemente en todas partes superior al 20% y muy preferentemente en todas partes superior al 40% de la resolución local máxima.
3. Dispositivo según una de las reivindicaciones 1 ó 2, caracterizado porque los dispositivos de detección (14, 24, 34) están dispuestos equidistantes a lo largo del trayecto.
4. Dispositivo según una de las reivindicaciones 1 a 3, caracterizado por estar previsto un dispositivo de guiado para conducir el blanco (50) a lo largo del trayecto a vigilar.
5. Dispositivo según una de las reivindicaciones 1 a 4, caracterizado porque en el sistema de guiado está previsto un blanco (50) dispuesto desplazable.
6. Dispositivo según una de las reivindicaciones 1 a 5, caracterizado porque los dispositivos de detección (14, 24, 34) están dispuestos a lo largo del trayecto a vigilar de modo que cada uno sólo pueda ser recubierto parcialmente por el blanco (50).
7. Dispositivo según una de las reivindicaciones 1 a 6, caracterizado porque los dispositivos de detección (14, 24, 34) están dispuestos a lo largo del trayecto a vigilar de modo que solamente puedan quedar recubiertos cada uno por el blanco (50) en un 90%, preferentemente sólo en un 85% y muy preferentemente sólo en un 80%.
8. Dispositivo según una de las reivindicaciones 1 a 7, caracterizado porque las dimensiones del blanco (50) están elegidas de modo tal o éste está configurado de modo tal que un dispositivo de detección (14, 24, 34) sólo pueda quedar recubierto parcialmente por el blanco (50).
9. Dispositivo según una de las reivindicaciones 1 a 8, caracterizado porque el blanco (50) es una plaquita metálica.
10. Dispositivo según una de las reivindicaciones 1 a 9, caracterizado porque a cada dispositivo de detección (14, 24, 34) le corresponde un dispositivo convertidor (19, 29, 39, 59).
11. Dispositivo según una de las reivindicaciones 1 a 9, caracterizado por estar previsto como mínimo un dispositivo multiplexador (54) entre un dispositivo convertidor (59) y una pluralidad de dispositivos de detección (14, 24, 34).
12. Dispositivo según una de las reivindicaciones 1 a 11, caracterizado porque las inductividades (16, 26, 36), en particular las bobinas de los dispositivos de detección (14, 24, 34) están dispuestas con sus ejes en dirección transversal, en particular ortogonal con respecto al trayecto a vigilar (51).
13. Dispositivo según una de las reivindicaciones 1 a 12, caracterizado porque por lo menos en una parte de los dispositivos de detección (14, 24, 34) la inductividad (16, 26, 36) está prevista como parte del oscilador (18, 28, 38).
14. Dispositivo según una de las reivindicaciones 1 a 13, caracterizado porque los dispositivos de detección (14, 24, 34) están dispuestos de tal modo que la superficie de solape de las curvas de sensibilidad (15, 25, 35) o curvas de atenuación de dispositivos de detección (14, 24, 34) inmediatamente contiguos entre sí está entre el 20% y 50%, en particular entre el 25% y el 35%.
15. Dispositivo según una de las reivindicaciones 1 a 14, caracterizado porque los dispositivos de detección (14, 24, 34) pueden captar cada uno una distancia radial del blanco (50) a un eje de la inductividad (16, 26, 36).
16. Procedimiento para la determinación de la posición de un blanco (50), especialmente metálico, en el cual se posicionan como mínimo dos dispositivos de detección (14, 24, 34) a lo largo de un trayecto (51) que se trata de vigilar, de tal modo que las curvas de sensibilidad (15, 25, 35) de dispositivos de detección (14, 24, 34) inmediatamente contiguos entre sí se solapen al menos parcialmente, suministrando los dispositivos de detección (14, 24, 34) cada uno una señal de distancia en función de la distancia del blanco,
en el que las señales de detección captadas respectivamente por los dispositivos de detección (14, 24, 34) son convertidas por lo menos por un dispositivo de conversión (19, 29, 39, 59) en señales analógicas, en particular en señales de intensidad y/o de tensión, y en el que a partir de las diferentes señales analógicas debidas a los respectivos dispositivos de detección (14, 24, 34) se determina la posición del blanco (50),
donde como señal de distancia se utilizan respectivamente señales de atenuación de los osciladores de los dispositivos de detección (14, 24, 34),
caracterizado porque para la evaluación se utiliza la señal de atenuación del dispositivo de detección que tenga la atenuación segunda en magnitud.
17. Procedimiento según la reivindicación 16, caracterizado porque los dispositivos de detección (14, 24, 34) están dispuestos de tal manera que a partir de las zonas parciales de alta resolución local de las curvas de atenuación de los distintos dispositivos de detección (14, 24, 34) se puede componer una curva de detección para la totalidad del trayecto a vigilar, y
porque para determinar la posición del blanco (50) se comparan los valores de atenuación medidos con datos aprendidos previamente captados, en particular de modo puntual.
18. Procedimiento según la reivindicación 17, caracterizado porque para captar los datos de aprendizaje se conduce el blanco (50) a lo largo del trayecto a vigilar, registrándose al mismo tiempo la posición del blanco (50) y las respectivas señales de atenuación de los dispositivos de detección (14, 24, 34).
19. Procedimiento según una de las reivindicaciones 17 ó 18, caracterizado porque durante la captación de los datos de aprendizaje se varía también la posición del blanco (50) en dirección transversal al trayecto que se ha de vigilar, registrándose también aquí al mismo tiempo las posiciones respectivas y las respectivas señales de atenuación.
20. Procedimiento según una de las reivindicaciones 16 a 19, caracterizado porque se normalizan las curvas de sensibilidad (15, 25, 35) de los dispositivos de detección (14, 24, 34).
21. Procedimiento según una de las reivindicaciones 16 a 20, caracterizado porque para la evaluación se utiliza una pareja de valores compuesta de la señal de atenuación que tenga la atenuación segunda en magnitud y la máxima atenuación.
22. Procedimiento según una de las reivindicaciones 17 a 21, caracterizado porque se interpola entre puntos de los datos de aprendizaje para determinar la posición del blanco (50).
23. Procedimiento según una de las reivindicaciones 17 a 22, caracterizado porque para efectuar la evaluación los tramos parciales de las curvas de atenuación se aproximan respectivamente por medio de rectas.
24. Procedimiento según una de las reivindicaciones 16 a 23, caracterizado porque para la evaluación se tiene en cuenta respectivamente sólo un tramo de un dispositivo de detección (14, 24, 34) o porque se evalúan simultáneamente varios dispositivos de detección (14, 24, 34), en particular se forman relaciones a partir de las señales analógicas.
Patentes similares o relacionadas:
Rodamiento que comprende un captador de desplazamiento angular, del 17 de Junio de 2020, de HUTCHINSON: Rodamiento que comprende un casquillo de rodamiento y un captador inductivo de desplazamiento angular de dicho casquillo de rodamiento, comprendiendo […]
Actuador lineal y dispositivo de control de oscilación para un vehículo ferroviario, del 18 de Marzo de 2020, de Moog Japan Ltd: Un actuador lineal que comprende: un rotor hueco que tiene un imán permanente fijado a una parte de su superficie periférica externa, y una […]
Cuentarrevoluciones magnético para la autodetección de estados de error al determinar el número de revoluciones detectables con este cuentarrevoluciones, del 23 de Octubre de 2019, de Leibniz-Institut für Photonische Technologien e.V: Cuentarrevoluciones magnético o contador de desplazamiento para la autodetección de estados de error al determinar números de revoluciones o números de desplazamientos […]
Sensor inductivo de presencia o posición, del 2 de Octubre de 2019, de SENSTRONIC, S.A.: Detector o sensor inductivo de posición o presencia del tipo que comprende como su elemento sensible y que define un plano de trabajo delantero […]
Sensor de recorrido lineal para detectar un movimiento lineal de un objeto, del 4 de Septiembre de 2019, de ROBERT BOSCH GMBH: Sensor de recorrido lineal para detectar un movimiento lineal de un objeto, con un transductor de valor de medición diseñado de forma tubular, que puede […]
Determinación de posición inductiva, del 21 de Agosto de 2019, de ZF FRIEDRICHSHAFEN AG: Dispositivo de determinación de posición inductiva que comprende: - una bobina ; - un elemento de posición ; - un equipo de exploración […]
Captadores inductivos de desplazamiento, del 16 de Mayo de 2019, de HUTCHINSON: Transductor para un captador inducido de desplazamiento que comprende un transductor y un objetivo adaptado para desplazarse según un grado de libertad con respecto al transductor, […]
 Junta hidraúlica giratoria con sonda de desplazamiento montada en la línea central, sistema para medir el desplazamiento del sistema de regulación del ventilador axial de paso variable y método del mismo, del 13 de Marzo de 2019, de Howden Axial Fans ApS: Una junta hidráulica giratoria para uso en un ventilador de flujo axial, que comprende:
una carcasa ;
un elemento interior acoplado […]
Junta hidraúlica giratoria con sonda de desplazamiento montada en la línea central, sistema para medir el desplazamiento del sistema de regulación del ventilador axial de paso variable y método del mismo, del 13 de Marzo de 2019, de Howden Axial Fans ApS: Una junta hidráulica giratoria para uso en un ventilador de flujo axial, que comprende:
una carcasa ;
un elemento interior acoplado […]