Sensor ultrasónico con varias salidas de conmutación.
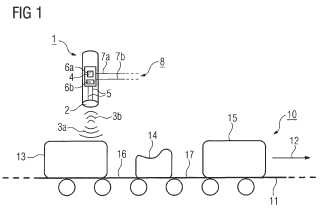
Sensor ultrasónico (1) con una unidad de procesamiento electrónica y con una unidad de radiación y recepción acústica (2) que emite de manera cíclica ráfagas de emisión de ultrasonidos (3a),
que detecta valores de medición (5) de las señales de eco de ultrasonidos (3b) provocadas por ello y los suministra a la unidad de procesamiento electrónica (4), y presentando el sensor ultrasónico (1) al menos dos salidas de conmutación independientes (7a, 7b) que se pueden activar por la unidad de procesamiento (4), en el que la unidad de procesamiento (4)
- gestiona al menos dos etapas de filtro independientes (6a, 6b) respectivamente con al menos un criterio de filtro independiente y un valor umbral predefinible,
- suministra de manera cíclica al menos un valor de medición (5) a las etapas de filtro (6a, 6b) que al alcanzar el respectivo valor umbral a través del criterio de filtro generan una señal binaria y, con ello,
- activan una de las dos salidas de conmutación independientes (7a, 7b), evaluándose en el criterio de filtro de una etapa de filtro la estabilidad de al menos un valor de medición (5).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08020984.
Solicitante: PEPPERL + FUCHS GMBH.
Nacionalidad solicitante: Alemania.
Dirección: LILIENTHALSTRASSE 200 68307 MANNHEIM ALEMANIA.
Inventor/es: LUBER,ERNST, SERTL,CLAUDIA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S15/88 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › Sistemas de sonar, especialmente adaptados para aplicaciones específicas (prospección o detección sísmica o acústica G01V 1/00).
- G01S7/527 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Extracción de las señales de eco deseadas.
- G01S7/539 G01S 7/00 […] › que utilizan el análisis de la señal de eco para la caracterización del blanco; Firma del blanco; Sección transversal del blanco.
- G06M1/10 G […] › G06 CALCULO; CONTEO. › G06M MECANISMOS CONTADORES; COMPUTO DE OBJETOS NO PREVISTOS EN OTRO LUGAR (cómputo por medida del volumen o del peso de artículos a contar G01F, G01G; adaptación de contadores a contadores de electricidad en el sentido de disposiciones electromecánicas para la medida de la integral en el tiempo de una potencia o de una corriente eléctricas G01R 11/16; computadores G06C - G06J; cómputo de impulsiones eléctricas H03K; cómputo de caracteres, palabras o mensajes durante la conmutación de redes para la transmisión de información digital H04L 12/08; disposiciones de cómputo en los sistemas telefónicos H04M 15/00). › G06M 1/00 Características de orden general. › por medios eléctricos o magnéticos.
- G06M7/04 G06M […] › G06M 7/00 Contado de objetos transportados por un transportador. › Contado de mercancías en piezas, p. ej. de cajas.
- H03K17/94 ELECTRICIDAD. › H03 CIRCUITOS ELECTRONICOS BASICOS. › H03K TECNICA DE IMPULSO (medida de las características de los impulsos G01R; modulación de oscilaciones sinusoidales por impulsos H03C; transmisión de información digital, H04L; circuitos discriminadores de detección de diferencia de fase entre dos señales de conteo o integración de ciclos de oscilación H03D 3/04; control automático, arranque, sincronización o estabilización de generadores de oscilaciones o de impulsos electrónicos donde el tipo de generador es irrelevante o esta sin especificar H03L; codificación, decodificación o conversión de código, en general H03M). › H03K 17/00 Conmutación o apertura de puerta electrónica, es decir, por otros medios distintos al cierre y apertura de contactos (amplificadores controlados H03F 3/72; disposiciones de conmutación para los sistemas de centrales que utilizan dispositivos estáticos H04Q 3/52). › caracterizado por la manera en que son producidas las señales de control.
PDF original: ES-2469665_T3.pdf
Fragmento de la descripción:
Sensor ultrasïnico con varias salidas de conmutaciïn Tal como se conoce, sensores de proximidad compactos emiten de manera cïclica basïndose en ultrasonidos, haces sonoros que tambiïn se denominan rïfagas de emisiïn. Los ecos que se reflejan por los objetos que se encuentran en la zona de un haz sonoro se vuelven a detectar por el sensor de proximidad y se analizan con una etapa de filtro integrada utilizando un criterio de filtro. Para ello, los haces sonoros emitidos y los ecos reflejados se someten a mediciones de tiempo de propagaciïn. A este respecto, los tiempos de propagaciïn de las seïales de eco reflejadas son, por regla general, directamente proporcionales a la distancia de los objetos con respecto al sensor de proximidad.
Con ello, es posible detectar la presencia o la ausencia de un objeto en la zona del haz sonoro y seïalizarlo en forma de una seïal binaria en una salida de conmutaciïn. Si, por ejemplo, el respectivo criterio de filtro puede procesar diferentes tiempos de propagaciïn de eco, entonces se pueden ajustar diferentes intervalos de conmutaciïn por parte de un usuario. Entonces es posible indicar en una salida de conmutaciïn mediante una seïal binaria si un objeto por ejemplo se encuentra en la zona seleccionada. Si estï ajustado un intervalo de conmutaciïn diferente a ello, entonces tambiïn se puede indicar en la salida de conmutaciïn mediante la seïal binaria si un objeto por ejemplo se encuentra en la ventana de detecciïn adicional. Si el respectivo sensor de proximidad ultrasïnico presenta dos o mïs salidas de conmutaciïn, entonces se pueden vigilar de este modo varias regiones de distancia. Finalmente, las seïales de conmutaciïn binarias en la una o las varias salidas de conmutaciïn se pueden comunicar a un dispositivo de control de memoria programable con el fin de realizar un procesamiento adicional especïfico de una aplicaciïn.
Hasta el momento es habitual emplear etapas de filtro con un criterio de filtro comïn en un sensor de proximidad ultrasïnico para decidir si se deben establecer o restablecer salidas de conmutaciïn. Sin embargo, en aplicaciones mïs complejas se pueden producir a este respecto imprecisiones. Asï, la clasificaciïn y el recuento de objetos mediante un sensor de proximidad ultrasïnico con una construcciïn de este tipo pueden ser no fiables. En particular, al aplicar sïlo una etapa de filtro con un criterio de filtro comïn no es posible sin mïs una detecciïn del movimiento de objetos. Asï, por ejemplo, no es posible una diferenciaciïn respecto a si un objeto detectado se mueve o sïlo se encuentra de forma estacionaria en la zona del haz sonoro de un sensor de proximidad.
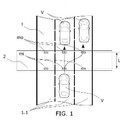
Aplicaciones de este tipo se pueden producir por ejemplo en la tïcnica de transporte o trïfico. Asï, puede ser necesario en un caso de aplicaciïn que no sïlo se deba detectar la ocupaciïn de una cinta transportadora con objetos. Mïs bien, tambiïn debe estar disponible una informaciïn acerca de si la cinta transportadora y, con ello, el objeto, se mueven. Aplicaciones similares tambiïn pueden aparecer en la tïcnica de trïfico. Por ejemplo, en zonas de cruce o sobre tramos de vïas no sïlo se tiene que detectar la presencia de vehïculos. Mïs bien, tambiïn debe estar disponible una informaciïn acerca de si un vehïculo detectado estï parado, si ya estï en movimiento o si continïa en movimiento.
Por el documento DE 198 31 978 A1 se conoce un circuito de sensor que puede representar varios estados de conmutaciïn. A este respecto, se compara una seïal de entrada con varios valores umbrales, generïndose, al superar los valores umbrales individuales o al quedar por debajo de los mismos, una seïal de salida que puede representar una serie de diferentes estados de conmutaciïn.
La invenciïn se basa por tanto en el objetivo de perfeccionar sensores de proximidad conocidos basïndose en ultrasonidos de modo que sea posible una seïalizaciïn tambiïn de estados que van mïs allï de la mera detecciïn de la presencia o de la ausencia de un objeto en un determinado lugar.
El objetivo se soluciona con un sensor ultrasïnico segïn la reivindicaciïn 1. Realizaciones adicionales ventajosas de la invenciïn se indican en las reivindicaciones dependientes.
El sensor ultrasïnico segïn la invenciïn presenta una unidad de radiaciïn y recepciïn acïstica que emite de manera cïclica rïfagas de emisiïn de ultrasonidos, que detecta valores de mediciïn de las seïales de eco de ultrasonidos provocadas por ello y los suministra a una unidad de procesamiento electrïnica. La unidad de procesamiento gestiona segïn la invenciïn al menos dos etapas de filtro independientes respectivamente con al menos un criterio de filtro independiente y un valor umbral predefinible. La unidad de procesamiento suministra de manera cïclica al menos un valor de mediciïn a estas etapas de filtro que al alcanzar el respectivo valor umbral a travïs del criterio de filtro generan una seïal binaria. Finalmente, con ello, se activa por la unidad de procesamiento respectivamente una salida de conmutaciïn independiente del sensor ultrasïnico.
Se considera como ventaja especial de la invenciïn que los valores de mediciïn se pueden someter a procedimientos de evaluaciïn diferentes, en particular estadïsticos, mediante los criterios de filtro independientes en las etapas de filtro individuales de las seïales de eco de ultrasonidos recibidas. Con ello, es posible detectar procesos dinïmicos, es decir, tambiïn objetos movidos, y comunicarlos de manera mïs diferenciada, por ejemplo, a un dispositivo de control.
Si un sensor ultrasïnico presenta por ejemplo dos salidas de conmutaciïn, entonces, con ello, se pueden emitir diferentes combinaciones de seïales binarias y, con ello, se puede transmitir informaciïn mïs diferenciada, por ejemplo, a un dispositivo de control de memoria programable. Asï, por ejemplo, se puede indicar mediante una primera salida de conmutaciïn activa o no activa si el transductor ultrasïnico ha detectado o no un objeto. Si en este caso la primera salida de conmutaciïn es activa, entonces se puede indicar mediante una segunda salida de conmutaciïn activa o no activa adicionalmente si el objeto detectado estï en movimiento o no. Esto representa sïlo uno de muchos posibles ejemplos para poder derivar informaciïn ampliada con ayuda de la evaluaciïn mïltiple segïn la invenciïn de las seïales de mediciïn en el sensor ultrasïnico mediante etapas de filtro independientes con criterios de filtro independientes.
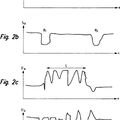
En la prïctica se pueden grabar, por ejemplo, en cada ciclo de mediciïn de un sensor de proximidad ultrasïnico segïn la invenciïn los valores reales de la amplitud y del tiempo de propagaciïn de todas las seïales de recepciïn. A las seïales de recepciïn estïn asignadas segïn la invenciïn etapas de filtro independientes que se pueden activar y parametrizar individualmente con profundidades de filtro ajustables. Las etapas de filtro se pueden ajustar por tanto de manera optimizada para diferentes tareas de detecciïn. Mediante las etapas de filtro paralelas que segïn la invenciïn funcionan independientemente entre sï se puede realizar un seguimiento continuo, por ejemplo, de la estabilidad y de la amplitud de todas las seïales de recepciïn. Por tanto, es posible determinar si los valores presentes con respecto a la estabilidad de seïal o con respecto a la amplitud de seïal superan valores umbrales predefinidos y por tanto se pueden considerar vïlidos o invïlidos. Estos resultados se pueden convertir entonces en seïales de estado binarias.
Con los criterios de filtro a modo de ejemplo, la estabilidad y la amplitud, es posible, de manera especialmente ventajosa, una detecciïn por ejemplo de procesos dinïmicos, especialmente de movimientos de objetos. Las seïales de estado binarias obtenidas con respecto a los criterios de filtro, la amplitud y la estabilidad, se asignan a dos salidas de conmutaciïn independientes entre sï. De manera ventajosa, para la detecciïn de objetos movidos, la primera salida de conmutaciïn se puede activar a travïs de una etapa de filtro que tiene como criterio de filtro la mayor amplitud de eco, y la segunda salida de conmutaciïn se puede activar a travïs de una etapa de filtro que tiene como criterio de filtro el eco mïs estable. En otra aplicaciïn de la invenciïn, con un sensor de proximidad ultrasïnico, cuyas al menos dos salidas de conmutaciïn se activan segïn la invenciïn por diferentes etapas de filtro, tambiïn se puede obtener informaciïn acerca de la altura o la expansiïn de un objeto o acerca del tipo de su superficie, es decir, en particular acerca de la planeidad o la rugosidad.
La invenciïn se explica a continuaciïn en mïs detalle mediante las figuras... [Seguir leyendo]
Reivindicaciones:
1. Sensor ultrasïnico (1) con una unidad de procesamiento electrïnica y con una unidad de radiaciïn y recepciïn acïstica (2) que emite de manera cïclica rïfagas de emisiïn de ultrasonidos (3a) , que detecta valores de mediciïn (5) de las seïales de eco de ultrasonidos (3b) provocadas por ello y los suministra a la unidad de procesamiento electrïnica (4) , y presentando el sensor ultrasïnico (1) al menos dos salidas de conmutaciïn independientes (7a, 7b) que se pueden activar por la unidad de procesamiento (4) , en el que la unidad de procesamiento (4)
-gestiona al menos dos etapas de filtro independientes (6a, 6b) respectivamente con al menos un criterio de filtro independiente y un valor umbral predefinible, -suministra de manera cïclica al menos un valor de mediciïn (5) a las etapas de filtro (6a, 6b) que al alcanzar el
respectivo valor umbral a travïs del criterio de filtro generan una seïal binaria y, con ello, -activan una de las dos salidas de conmutaciïn independientes (7a, 7b) , evaluïndose en el criterio de filtro de una etapa de filtro la estabilidad de al menos un valor de mediciïn (5) .
2. Sensor ultrasïnico segïn la reivindicaciïn 1, evaluïndose en el criterio de filtro de una etapa de filtro (6a, 6b) la amplitud de al menos un valor de mediciïn (5) .
3. Sensor ultrasïnico segïn una de las reivindicaciones anteriores, detectïndose por una etapa de filtro (6a, 6b) adicionalmente la duraciïn de permanencia necesaria para alcanzar el respectivo criterio de filtro.
4. Sensor ultrasïnico segïn una de las reivindicaciones anteriores, recurriendo una etapa de filtro (6a, 6b) a un grupo de valores de mediciïn para formar el valor real del respectivo criterio de filtro.
Patentes similares o relacionadas:
Procedimiento y dispositivo para determinar estado de terminal, y terminal, del 14 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de control de una pantalla de un terminal, que comprende: transmitir (S101, S201), por un generador acústico de conducción ósea, una señal de […]
Sensor de distancia y método para deteminar una distancia, del 30 de Marzo de 2012, de ROBERT BOSCH GMBH: Sensor de distancia con un emisor y un receptor de ultrasonidos para la emisión de pulsos de ultrasonido y para la recepción de pulsos de ultrasonido reflejados […]
 MÉTODO PARA CARACTERIZAR EL TRÁFICO RODADO, del 29 de Marzo de 2012, de UNIVERSIDAD CARLOS III DE MADRID: Método para caracterizar el tráfico rodado.
La presente invención está dirigida a un método que permite caracterizar el tráfico rodado a lo largo de una vía de […]
MÉTODO PARA CARACTERIZAR EL TRÁFICO RODADO, del 29 de Marzo de 2012, de UNIVERSIDAD CARLOS III DE MADRID: Método para caracterizar el tráfico rodado.
La presente invención está dirigida a un método que permite caracterizar el tráfico rodado a lo largo de una vía de […]
MÉTODO PARA CARACTERIZAR EL TRÁFICO RODADO, del 22 de Marzo de 2012, de UNIVERSIDAD CARLOS III DE MADRID: La presente invención está dirigida a un método que permite caracterizar el tráfico rodado a lo largo de una vía de circulación que contiene […]
PROCEDIMIENTO PARA LA MEDICION DE LA DISTANCIA Y REALIZACION DEL PROCEDIMIENTO., del 16 de Junio de 2003, de ROBERT BOSCH GMBH: Procedimiento para la medición de la distancia, con preferencia en automóviles, con impulsos de ultrasonido, donde una señal es irradiada con una forma […]
MEJORAS INTRODUCIDAS EN LA MEDICION DE DISTANCIAS POR ECO DE IMPULSOS., del 16 de Febrero de 2001, de CROMA DEVELOPMENTS LIMITED: LA INVENCION SE REFIERE A LA MEDICION DE DISTANCIA POR ECO DE IMPULSOS Y EN PARTICULAR A UN METODO Y UN APARATO PARA CALCULAR TAL DISTANCIA […]
PROCEDIMIENTO PARA LA DETECCION DE OBSTACULOS MEDIANTE ULTRASONIDOS., del 1 de Octubre de 1999, de MAYSER GMBH & CO.: PARA DETECTAR OBSTACULOS ES CONOCIDA LA EMISION DE IMPULSOS DE ULTRASONIDOS PERIODICAMENTE Y LA DEDUCCION DE LA POSICION DE LOS OBSTACULOS […]
 PROCEDIMIENTO PARA LA MEDICION DE UN ESPACIO DE APARCAMIENTO Y LA DETECCION DE OBSTACULOS DURANTE EL PROCESO DE APARCAMIENTO DE UN VEHICULO, ASI COMO SISTEMA DE MEDICION CORRESPONDIENTE, del 28 de Mayo de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos […]
PROCEDIMIENTO PARA LA MEDICION DE UN ESPACIO DE APARCAMIENTO Y LA DETECCION DE OBSTACULOS DURANTE EL PROCESO DE APARCAMIENTO DE UN VEHICULO, ASI COMO SISTEMA DE MEDICION CORRESPONDIENTE, del 28 de Mayo de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos […]