Sistema de auto-descarga de buques graneleros.
Sistema de auto-descarga de buques graneleros.
Especialmente concebido para efectuar la descarga de mercancías a granel transportadas en bodegas de buques,
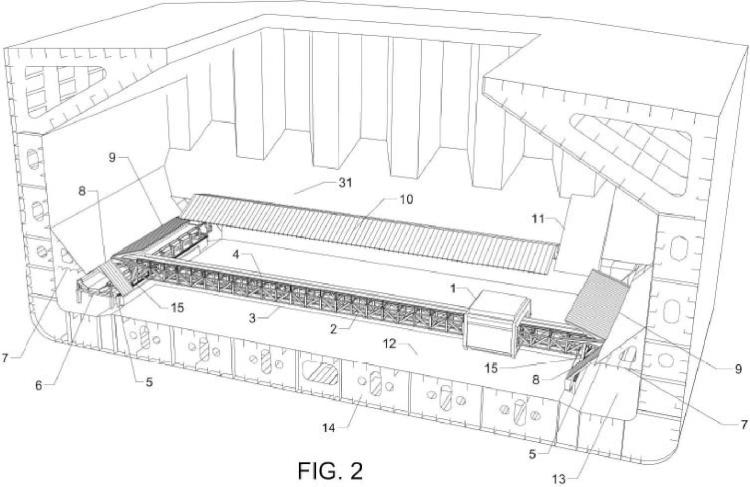
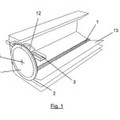
el sistema comprende al menos una rotopala (1) para recoger las mercancías de la bodega y depositadas sobre un transportador lineal continuo transversal (4), que pasa por el interior del anillo formado por la rotopala (1), en donde ésta se desplaza linealmente en el eje del transportador lineal continuo transversal (4), contando con transportador lineal continuo longitudinal (6) que recorre longitudinalmente la bodega, para recibir la mercancía del transportador lineal continuo transversal (4) y un carro de arrastre (3) de la rotopala (1) a lo largo del transportador lineal continuo transversal (4), estando dicho carro de arrastre (3) dotado de una pala frontal continua (18) que recorre transversalmente la bodega tras la rotopala (1), apilando la mercancía sobrante tras el paso de la rotopala (1).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430138.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: PANADERO PASTRANA, JESUS, MARTINEZ DIAZ, CARLOS, OLMOS GUIO,Sergio, DE LARA REY,José.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B25/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 25/00 Instalaciones de acomodación de carga, p. ej. estiba, centrado o compensado; Buques caracterizados por ello (cubas para pescado de barcos de pesca B63B 35/24; equilibrado o compensación efectuado de otra forma que por división de la carga, p. ej. por empleo de lastre, B63B 43/06, B63B 43/08). › para cereales.
- B63B27/22 B63B […] › B63B 27/00 Disposición de equipos a bordo para el embarque o el desembarque de carga o de pasajeros (gabarras o barcazas de descarga automática B63B 35/30; grúas flotantes B66C 23/52). › de transportadores, p. ej. correa sin fin o husillo.
- B65G67/60 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 67/00 Carga o descarga de vehículos (por medios incorporados en los vehículos B60 - B64, p. ej. B60P 1/00, B61D 9/00, B63B 27/00, B64D 9/00; instalaciones en tierra para aeronaves o plataformas de los portaaviones B64F 1/32). › Carga o descarga de buques (disposición de equipos a bordo para el embarque o el desembarque de carga o de pasajeros B63B 27/00).
Fragmento de la descripción:
P201430138
SISTEMA DE AUTO-DESCARGA DE BUQUES GRANELEROS
DESCRIPCIÓN
OBJETO DE LA INVENCIÓN
La presente invención pertenece al sector naval, al campo técnico de las embarcaciones, concretamente a buques de carga y más concretamente a los buques de carga de mercancía a granel. De forma particular la invención se refiere a los sistemas y maquinaria de auto-descarga de la mercancía transportada a bordo de buques graneleros. Sistemas que reducen los costes portuarios y facilitan la operación en puertos de descarga en puertos con escasa infraestructura o sobre estructuras flotantes como gabarras. Además estos sistemas permiten minimizar el tiempo necesario para la descarga de este tipo de buques.
ANTECEDENTES DE LA INVENCIÓN
Dentro de los sistemas empleados para la auto-descarga de buques graneleros se pueden distinguir tres funciones diferenciadas que deben cumplir todos los sistemas empleados a bordo. La primera función a cumplir debe ser apilar y recoger la mercancía de la bodega, la segunda función elevación de la mercancía por encima de la flotación del buque y la tercera función debe ser sacar la mercancía del buque por encima, como mínimo, de la flotación de este.
En los sistemas discontinuos, de grúas tipo pluma, las funciones segunda y tercera las ejecuta la propia grúa y la recogida del material se efectúa sin necesidad de apilado en las fases iniciales, donde para la limpieza total de la bodega se necesita del uso de palas 30 cargadoras frontales en buena parte del proceso de descarga. Por tratarse de un sistema de descarga discontinuo los consumos específicos por tonelada descargada son mayores que en los sistemas continuos. Otro de los inconvenientes es la dependencia parcial de medios portuarios que provean de los medios necesarios para apilar la mercancía y poder efectuar la limpieza total de las bodegas, lo que limita la operatividad de este tipo de buques 35 para determinadas operaciones que requieran de total independencia y encarece las P201430138
estancias en puerto por las menores velocidades promedio de descarga y la necesidad de uso de servicios del puerto. Otro inconveniente es que puesto que las grúas se sitúan sobre cubierta, estas suponen pesos altos, cuestión que reduce la altura metacéntrica del buque, reduciendo la estabilidad del buque en cuestión.
En los medios de descarga continuos la tercera función la realiza siempre una cinta transportadora, a través de una galería de descarga en voladizo.
En los sistemas de rascador superior las funciones primera y segunda pueden realizarse por separado o por el mismo rascador. En el caso de realizarse por separado, se colocan dos parejas de rascadores por bodega, situados siempre sobre la mercancía de la bodega, que mueven la mercancía en dos ejes en el plano horizontal apilándola en un punto común de la bodega que da paso a elevadores de cangilones, que depositan la mercancía sobre un conjunto de cintas que se encargan de sacar la mercancía del buque.
Los inconvenientes de este sistema radican fundamentalmente en que se necesita suspender el equipo de rascadores sobre la mercancía, tal y como se describe en la patente US4474523 (A) , de forma que hay que ir bajándolo conforme se vacía la bodega. El equipo de descarga está en contacto con la mercancía en navegación, produciendo un desgaste adicional en el equipo de descarga. Además se necesita de medios de elevación propios para cada bodega, lo que liga el número de elevadores de cangilones al número de bodegas del buque, lo que ha limitado su uso para buques de hasta 5 bodegas. Con tamaños máximos comprendidos entre Handysize o Supramax, hay variaciones de este sistema, como en los documentos US4784560 (A) , US3144142 (A) , EP0109114 (B1) , US5372468 (A) , si bien su mayor complejidad mecánica hace que no se encuentren actualmente a bordo de buques en operación.
Para reducir el número de elevadores de cangilones y de rascadores dentro del buque, se optó por aunar las funciones primera y segunda en un único aparato, donde el rascador se encuentra suspendido por un extremo por un bastidor basculante, de manera que se convierte el rascador en rascador-elevador de cangilones, descrito en la patente GB1385805 (A) , US5049021 (A) y de forma muy similar en DE2620154 (A1) . Para alcanzar a toda la bodega el rascador se encuentra suspendido sobre un puente que mueve el equipo sobre unos railes que mueven el equipo en sentido longitudinal y a su vez el P201430138
rascador y el bastidor basculante se desplazan transversalmente sobre la bodega sobre el puente que lo sostiene a través de otro grupo de railes. El rascador descarga sobre una cinta transversal y de esta hacia el conjunto de cintas transportadoras de material que conducen la mercancía fuera del buque. También hay aplicaciones de soluciones combinadas de rascador superior sobre puente con cintas transportadoras en el fondo, tales como la patente US4350467 (A) , o que basculan desde el fondo de la bodega como en la US4286909 (A) , que presentan alguna ventaja sobre los otros sistemas de rascador y numerosos inconvenientes adicionales que hacen que no se encuentren buques en operación con este sistema.
Con esto se consigue recuperar las tolvas laterales presentes en los buques graneleros convencionales, en lugar de contar con doble costado plano como el presente en los buques con rascadores horizontales y elevadores de cangilones, lo que consigue que recuperen la condición de auto-estibantes.
También se consigue desligar el número de rascadores del número de bodegas, en el caso de montar un puente móvil por encima de las escotillas, de manera que el rascador pasa de una bodega a otra, si bien también se han instalado en buques un equipo de rascador sobre bastidor basculante por cada bodega. Esto se explica por poseer velocidades de descarga muy pobres así como un aparatoso equipo en cubierta, en el caso de montar un único puente móvil sobre cubierta, si bien posee una buena adaptabilidad a buques graneleros convencionales. Esta configuración está limitada en cuanto al puntal de la bodega, donde la longitud del rascador debe ser al menos el puntal de la bodega. Esto deriva en un aumento de peso del rascador, un aumento de peso del bastidor basculante, y un aumento de peso del puente sobre el que se mueve. Como conclusión decir que el equipo no se ha adaptado a tamaños superiores a Supramax, por lo que el potencial de crecimiento de este equipo es limitado.
Dentro de los buques auto-descargados de mas éxito se encuentran los de descarga por gravedad, con patentes relacionadas CA2064535 (A1) , CA2234016 (A1) , US3572276 (A) , donde la elevación de la mercancía se realiza mediante cintas C Loop o cintas inclinadas como en el caso de US5364218 (A) o US3191998 (A) y el apilado y recogida a través de tolvas inclinadas que permiten que la mercancía caiga por gravedad sobre cintas transportadoras de material que recorren el buque longitudinalmente y conducen la P201430138
mercancía hasta un único elevador para todo el buque. El sistema posee gran simplicidad y efectividad, donde solo necesita de alimentadores específicos que limiten el paso del material a las cintas, llamados "gate feeders", como elemento distintivo, donde se alcanzan las mayores velocidades de descarga de entre todos los sistemas de auto-descarga. La principal limitación de este sistema está en la perdida de volumen que resulta de la instalación de las tolvas en las bodegas, donde suele ser de un 20 % con respecto a un buque granelero de igual desplazamiento. Las aplicaciones prácticas de este sistema hacen que su tamaño máximo sea de buques de tipo Panamax.
Existen diferentes propuestas para la utilización de rotopalas para la descarga de buques graneleros, donde parte de la problemática de común a resolver es como proteger la rotopala de la mercancía durante la navegación. La primera alternativa para solucionar este problema es dejar la rotopala en todo por encima de la mercancía, de manera que la presión del material no dañe el equipo como ocurre en los documentos GB1369418 (A) o US4616969 (A) . Los inconvenientes con los que cuenta son los mismos que en el sistema de rascadores horizontales, que se resumen en la necesidad de contar un elevador de cangilones para cada bodega y la necesidad de contar con un equipo que sea capaz de suspender la rotopala sobre puente transversal y moverla sobre en la bodega. También cuenta por este motivo con la imposibilidad de contar con tolvas laterales inclinadas que permitan la auto-estiba, facultad muy importante para un buque granelero.
También se puede montar el puente de la rotopala en un basculante sobre la cubierta del buque como en los equipos con rascador superior, EP0020167 (A1) , si bien...
Reivindicaciones:
1ª. Sistema de auto-descarga de buques graneleros, previsto para efectuar la descarga de mercancías a granel transportadas en bodegas de buques, y en donde cada bodega incluye al menos una unidad de descarga, caracterizado porque comprende:
- Al menos una rotopala (1) determinante de un anillo dispuesto en el fondo de la bodega, para recoger las mercancías de dicha bodega y depositarlas sobre un transportador lineal continuo transversal, (4) que pasa por el interior del anillo formado por la rotopala (1) , en donde esta se desplaza linealmente en el eje del transportador lineal continuo transversal (4) , siendo el eje de giro de la rotopala (1) paralelo al eje del transportador lineal continuo transversal (4) ;
- Al menos un transportador lineal continuo longitudinal (6) que recorre longitudinalmente la bodega, para recibir la mercancía del transportador lineal continuo transversal (4) ;
- Al menos un carro de arrastre (3) de la rotopala (1) , que soporta la estructura de la rotopala y permite el desplazamiento transversal de dicha rotopala (1) a lo largo del transportador lineal continuo transversal (4) sin soportar la estructura (2) del transportador lineal continuo transversal (4) , estando dicho carro de arrastre (3) dotado de una pala frontal continua (18) que recorre transversalmente la bodega tras la rotopala (1) , apilando la mercancía sobrante tras el paso de la rotopala (1) ; con la particularidad que el desplazamiento de la rotopala (1) y del carro de arrastre (3) se realiza a través de guías transversales de movimiento (16, 17) situadas en el carro de arrastre (3) , moviéndose solidariamente el transportador lineal continuo transversal (4) y el carro de arrastre (3) , conjuntamente con la rotopala (1) , en la dirección de desplazamiento paralela al transportador lineal continuo longitudinal (6) , mediante unas guías longitudinales de movimiento (5) o raíles situados a ambos lados de la bodega, habiéndose previsto además que el conjunto de la transportador lineal continuo transversal (4) , carro de arrastre (3) y rotopala (1) , y transportador lineal continuo longitudinal (6) , así como las guías longitudinales de movimiento (5) , estén protegidas por falsas tolvas bajas divididas por dos elementos que separan la mercancía del equipo de descarga en condiciones de navegación, y cuyos elementos diferenciados y constitutivos de las tolvas bajas consisten en una parte superior fija (7, 31) rígidamente unida a la estructura del buque y una parte de cierre móvil (9, 10)
que permite el paso de la rotopala (1) en su movimiento transversal en la bodega y del conjunto transportador lineal continuo transversal (4) , carro de arrastre (1) y rotopala (1) en su movimiento longitudinal, comprendiendo además al menos una tolva falsa baja por cada banda de la bodega y al menos una falsa tolva baja por cada conjunto de cinta transportadora lineal continua transversal (4) , carro de arrastre (3) y rotopala (1) ; habiéndose previsto así mismo que el sistema de cierre móvil de las tolvas bajas esté separado y sea independiente para cada uno de los transportadores lineales continuos, caracterizándose además por que las falsas tolvas bajas que forman la parte móvil, están determinadas por lamas (9, 10) unidas por un eje común y de giro (21) paralelo al respectivo transportador lineal continuo (4 y 6) , resguardando a la mercancía en su recorrido, rotando dichas lamas (9 y 10) en torno a ese eje común y de giro (21) para permitir el paso de la rotopala (1) de la estructura (2) del transportador lineal continuo transversal (4) y del carro de arrastre (3) , permaneciendo cerradas las lamas (9 y 10) en navegación para impedir que la mercancía se ponga en contacto con el equipo de descarga, comprendiendo además un sistema de accionamiento de las lamas (9 y 10) que permite la apertura controlada de los espacios ocupados por los transportadores lineales continuos (4 y 6) en donde el sistema de accionamiento está caracterizado por incluir un elemento que se mueve linealmente paralelo al eje (21) de giro de las lamas (9 y10) y porque el eje de giro (21) de las lamas transversales es paralelo al eje del transportador lineal continuo transversal y el eje de giro de las lamas (21) longitudinales es paralelo al eje del transportador lineal continuo longitudinal 2ª. Sistema de auto-descarga de buques graneleros, según reivindicación 1ª, caracterizado porque el sistema de accionamiento de las lamas incluye una pieza de transición (25) que ejerce presión sobre las lamas (9) que producen el giro que permite la apertura de la propia lama.
3ª. Sistema de auto-descarga de buques graneleros, según reivindicación 2ª caracterizado porque la pieza de transición (25) posee caras inclinadas que facilitan la apertura y cierre gradual de la lama.
4ª. Sistema de auto-descarga de buques graneleros, según reivindicación 1ª, caracterizado porque la estructura (2) del transportador lineal continuo transversal (4) y del carro de
arrastre (3) se encuentran unidas en los extremos de la bodega, permitiendo el movimiento de la rotopala (1) a lo largo del transportador lineal continuo transversal (4) .
5ª. Sistema de auto-descarga de buques graneleros, según reivindicación 1ª caracterizado porque la estructura (2) del transportador lineal continuo transversal (4) y el carro de arrastre (3) se mueven accionados desde las falsas tolvas bajas laterales que permiten el movimiento del conjunto formado por la rotopala (1) , el carro de arrastre (3) y el transportador lineal continuo transversal (4) y su estructura, así como sus elementos dependientes, longitudinalmente, paralelos al eje del transportador lineal continuo longitudinal (6) .
6ª. Sistema de auto-descarga de buques graneleros, según reivindicaciones 2ª y 3ª caracterizado porque las lamas (9-10) poseen una pieza de acoplamiento (24) con el transportador lineal continuo transversal (4) , y cuya pieza de acoplamiento (24) está unida a la lama mediante un bulón con el eje de giro paralelo al eje de giro de la lama, permitiendo mantenerse alineada con la pieza de transición (25) correspondiente al sistema de accionamiento de las lamas, durante el giro de las mismas.
7ª. Sistema de auto-descarga de buques graneleros, según reivindicación 6ª, caracterizado porque la pieza de acoplamiento (24) posee en un extremo un rodillo (26) que permite transmitir la presión ejercida por la pieza de transición (25) que causa el giro de la lama a la que está unida dicha pieza de transición (25) .
8ª. Sistema de auto-descarga de buques graneleros, según reivindicaciones anteriores, caracterizado porque el transportador lineal transversal (4) consiste en una cinta transportadora.
9ª. Sistema de auto-descarga de buques graneleros, según reivindicaciones anteriores caracterizado porque el transportador lineal longitudinal (6) consiste en una cinta transportadora.
10ª. Sistema de auto-descarga de buques graneleros, según reivindicaciones anteriores, caracterizado porque las guías longitudinales de movimiento, consisten en un conjunto de raíles (5) .
11ª. Sistema de auto-descarga de buques graneleros, según reivindicaciones anteriores, caracterizado porque las guías transversales de movimiento (16 y 17) que posee el carro de arrastre (3) , consisten en un conjunto de raíles.
Patentes similares o relacionadas:
Mecanismo limitador de la carga de una grúa en una embarcación, del 3 de Octubre de 2018, de INDUSTRIAS GUERRA, S.A: Mecanismo limitador de la carga de una grúa en una embarcación, donde la grúa comprende un brazo y una columna de giro unida a la embarcación, […]
 SISTEMA DE AUTO-DESCARGA DE BUQUES GRANELEROS, del 13 de Agosto de 2015, de UNIVERSIDAD POLITECNICA DE MADRID: Especialmente concebido para efectuar la descarga de mercancías a granel transportadas en bodegas de buques, el sistema comprende al menos una rotopala para recoger las […]
SISTEMA DE AUTO-DESCARGA DE BUQUES GRANELEROS, del 13 de Agosto de 2015, de UNIVERSIDAD POLITECNICA DE MADRID: Especialmente concebido para efectuar la descarga de mercancías a granel transportadas en bodegas de buques, el sistema comprende al menos una rotopala para recoger las […]
 SISTEMA PARA CARGA Y DESCARGA EN OPERACIONES PORTUARIAS, COMPRENDE UNA GRÚA; Y UNA BASE UBICADA EN EL CUERPO DE LA GRÚA QUE SOSTIENE Y APILA LAS TAPAS DE ESCOTILLA, del 7 de Noviembre de 2013, de BOBENRIETH GIGLIO, Guillermo: Sistema para carga y descarga en operaciones portuarias y soporte de tapas de escotilla de bodegas de embarcaciones marítimas, que comprende: una grúa de carga […]
SISTEMA PARA CARGA Y DESCARGA EN OPERACIONES PORTUARIAS, COMPRENDE UNA GRÚA; Y UNA BASE UBICADA EN EL CUERPO DE LA GRÚA QUE SOSTIENE Y APILA LAS TAPAS DE ESCOTILLA, del 7 de Noviembre de 2013, de BOBENRIETH GIGLIO, Guillermo: Sistema para carga y descarga en operaciones portuarias y soporte de tapas de escotilla de bodegas de embarcaciones marítimas, que comprende: una grúa de carga […]
 SISTEMA MODULAR DE AUTO-DESCARGA DE MERCANCÍA A GRANEL TRANSPORTADA EN BODEGAS DE BUQUES, del 19 de Septiembre de 2012, de OLMOS GUIO, Sergio: Sistema modular de auto-descarga de la mercancía transportada en bodegas de buques, con un módulo de auto-descarga por cada bodega , que tiene al menos un transportador […]
SISTEMA MODULAR DE AUTO-DESCARGA DE MERCANCÍA A GRANEL TRANSPORTADA EN BODEGAS DE BUQUES, del 19 de Septiembre de 2012, de OLMOS GUIO, Sergio: Sistema modular de auto-descarga de la mercancía transportada en bodegas de buques, con un módulo de auto-descarga por cada bodega , que tiene al menos un transportador […]
 CABINA DE ATRAQUE PARA EL EMBARQUE Y DESEMBARQUE PARA BUQUES, del 3 de Septiembre de 2012, de TEAM, PORTS & MARITIME, S.L: Cabina de atraque para el embarque y desembarque para buques que comprende un primer cuerpo telescópico que presenta interiormente un pasillo […]
CABINA DE ATRAQUE PARA EL EMBARQUE Y DESEMBARQUE PARA BUQUES, del 3 de Septiembre de 2012, de TEAM, PORTS & MARITIME, S.L: Cabina de atraque para el embarque y desembarque para buques que comprende un primer cuerpo telescópico que presenta interiormente un pasillo […]
 SISTEMA MODULAR DE AUTO-DESCARGA DE MERCANCÍA A GRANEL TRANSPORTADA EN BODEGAS DE BUQUES, del 16 de Agosto de 2012, de OLMOS GUIO, Sergio: Sistema modular de auto-descarga de la mercancía transportada en bodegas de buques, con un módulo de auto-descarga por cada bodega , que tiene al menos […]
SISTEMA MODULAR DE AUTO-DESCARGA DE MERCANCÍA A GRANEL TRANSPORTADA EN BODEGAS DE BUQUES, del 16 de Agosto de 2012, de OLMOS GUIO, Sergio: Sistema modular de auto-descarga de la mercancía transportada en bodegas de buques, con un módulo de auto-descarga por cada bodega , que tiene al menos […]
 Dispositivo para cargar medios de transporte, en particular medios de transporte de gran capacidad, con productos a granel así como módulo de carga, del 8 de Agosto de 2012, de FLSMIDTH A/S: Dispositivo para cargar medios de transporte, en particular medios de transporte de gran capacidad, con productos a granel, que comprende
a) un bastidor central […]
Dispositivo para cargar medios de transporte, en particular medios de transporte de gran capacidad, con productos a granel así como módulo de carga, del 8 de Agosto de 2012, de FLSMIDTH A/S: Dispositivo para cargar medios de transporte, en particular medios de transporte de gran capacidad, con productos a granel, que comprende
a) un bastidor central […]
 RAMPA DE TIERRA AUTOPROPULSADA, PARA EMBARCAR/DESEMBARCAR CARGA RODADA EN BUQUES, del 4 de Enero de 2011, de MACGREGOR E.S.P., SOCIEDAD ANONIMA: Rampa de tierra autopropulsada, para embarcar/desembarcar carga rodada en buques, que consta de una sección con inclinación fija apoyada por un extremo en el muelle […]
RAMPA DE TIERRA AUTOPROPULSADA, PARA EMBARCAR/DESEMBARCAR CARGA RODADA EN BUQUES, del 4 de Enero de 2011, de MACGREGOR E.S.P., SOCIEDAD ANONIMA: Rampa de tierra autopropulsada, para embarcar/desembarcar carga rodada en buques, que consta de una sección con inclinación fija apoyada por un extremo en el muelle […]