Sensor de velocidad de rotación.
Procedimiento para el funcionamiento y para la evaluación simultánea de un sensor de velocidad de rotación que presenta al menos un elemento oscilador que puede operar a lo largo de un primer eje de oscilación para un movimiento de oscilación,
así como al menos un elemento de Coriolis dispuesto sobre el elemento oscilador, dispuesto apto para oscilar a lo largo de un segundo eje de oscilación que se extiende perpendicularmente al primer eje de oscilación, que comprende las etapas del procedimiento:
- generación de una señal digital de funcionamiento con una frecuencia de oscilación que corresponde a la frecuencia de resonancia del elemento oscilador,
- conversión digital-analógica de la señal digital de funcionamiento y funcionamiento del elemento oscilador con la señal analógica de funcionamiento,
- detección de una velocidad de Coriolis del elemento de Coriolis, que aparece a través de una rotación del sensor de velocidad de rotación alrededor de un eje de rotación que se extiende perpendicularmente a los dos ejes de oscilación y generación de una señal analógica de Coriolis, proporcional a la velocidad de Coriolis,
- conversión analógica-digital de la señal analógica de Coriolis,
caracterizado por
- multiplicación en fase de la señal digital de Coriolis con la señal digital de funcionamiento para la formación de una señal intermedia,
- generación de una señal de ajuste, proporcional a la velocidad de rotación del sensor de velocidad de rotación, con la ayuda de la señal intermedia,
- multiplicación de la señal de ajuste con la señal digital de funcionamiento para obtener una señal digital de compensación, en coincidencia de fases con la señal digital de funcionamiento,
- conversión digital-analógica de la señal digital de compensación para obtener una señal de compensación analógica, en coincidencia de fases con la señal digital de funcionamiento, y aplicación de la señal de compensación analógica al elemento Coriolis, así como
- emisión de la señal de ajuste.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/063186.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: STEINLECHNER, SIEGBERT.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C19/56 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 19/00 Giróscopos; Dispositivos sensibles al giro con masas vibratorias; Dispositivos sensibles al giro sin masas móviles; Medida de velocidad angular usando efectos giroscópicos. › Dispositivos sensibles al giro con masas vibratorias, p. ej. sensores de velocidad vibratoria angular sobre la base de las fuerzas de Coriolis.
PDF original: ES-2547462_T3.pdf
Fragmento de la descripción:
Sensor de velocidad de rotación Ámbito técnico
La presente invención hace referencia a un procedimiento para el funcionamiento y para la evaluación simultánea de un sensor de velocidad de rotación según la reivindicación 1, así como a una disposición de circuito para la realización del procedimiento de acuerdo con la invención, según la reivindicación 6.
Estado de la técnica
Los sensores micromecánicos de velocidad de rotación se emplean, por ejemplo, en automóviles para la función del programa de estabilidad electrónica, ESP, o para la compensación de la inclinación oscilante. Miden con la ayuda del efecto Coriolis, por ejemplo, la velocidad de rotación alrededor del eje vertical del vehículo o alrededor de su eje longitudinal.
En los sensores micromecánicos de velocidad de rotación se encuentran uno o varios elementos osciladores suspendidos elásticamente, que se desplazan en oscilaciones periódicas con la ayuda de fuerzas motrices F(t) periódicas en el tiempo, aplicadas electrostáticamente. Los elementos osciladores se pueden considerar en este caso de manera simplificada como masas suspendidas elásticamente.
Supongamos que el plano, en el que se encuentra el elemento oscilador plano, es el plano x-y. Sí se gira la masa m oscilante en dirección-x alrededor del plano-z que se extiende perpendícularmente al plano-x-y, que puede ser, por ejemplo, el eje vertical del vehículo, con una velocidad de rotación Q, la masa m experimenta una aceleración periódica adicional en dirección-y, que es proporcional a la velocidad de rotación Q. Esta aceleración se conoce como aceleración de Coriolis. Para medir esta aceleración, son necesarios dispositivos de medición especiales, por ejemplo una masa mc acoplada elásticamente en la masa m que forma el elemento oscilador, que puede oscilar en dlrección-y, así como, por ejemplo dos grupos de condensadores de medición para la medición de la curva de la oscilación en dirección-y. Esta segunda masa se designa a continuación como masa de Coriolis mc. La masa de Coriolis mc forma, considerado en modo simple, un elemento de Coriolis dispuesto elásticamente en el elemento oscilador. En este caso, el elemento oscilador puede ejecutar movimientos de oscilación a lo largo de un primer eje de oscilación que forma el eje-x, de manera que el elemento de Coriolis puede ejecutar movimientos de oscilación a lo largo de un segundo eje de oscilación que se extiende perpendicularmente al primer eje de oscilación y que forma el eje-y.
En tales sensores operan tanto el elemento oscilador que comprende la masa m como también el elemento integral de Coriolis que comprende la masa de Coriolis mc. A tal fin, debe seleccionarse y/o ajustarse de manera adecuada la frecuencia de excitación de la fuerza motriz F(t). En la frecuencia de resonancia no predomina ningún desplazamiento de fases entre la velocidad de movimiento v(t) de la masa m provocada por la fuerza motriz F(t) y la fuerza motriz F(t) en sí. De la misma manera, en caso de resonancia, no predomina ningún desplazamiento de fases entre la velocidad de Coriolis vc(t), provocada por la aceleración de Coriolis, de la masa de Coriolis mc y la fuerza motriz F(t).
La evaluación del movimiento de la masa de Coriolis mc se puede realizar directamente sobre la denominada disposición de circuito abierto, o a través de un bucle de retroalimentación de fuerzas conocido como circuito cerrado. En la retroalimentación de fuerzas, un regulador a través de una fuerza de compensación Fc(t) electroestática aplicada adicionalmente sobre la masa de Coriolis mc se ocupa de que la masa de Coriolis mc no ejecute ninguna oscilación en la dirección del eje-y y permanezca en reposo en esta dirección, aunque esté presente una velocidad de rotación Q. En este caso, la fuerza Fc(t) a aplicar representa una medida de velocidad de rotación Q.
Un bucle de retroalimentación de fuerza tiene la ventaja de que el ancho de banda de evaluación es ajustable sobre los parámetros de ajuste y también de que se reducen claramente los errores debidos a no linealidades en el sensor, como por ejemplo resortes no lineales en la masa de Coriolis mc.
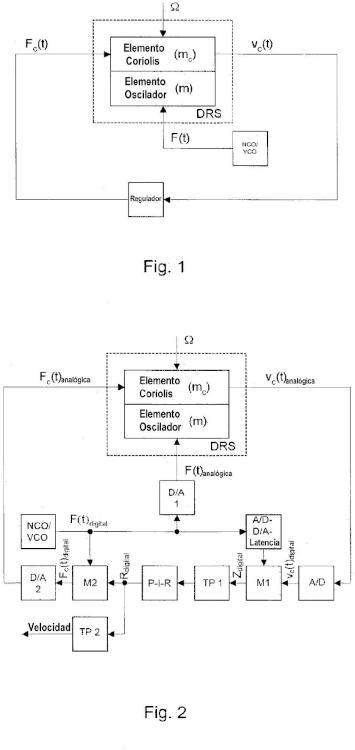
La figura 1 muestra un diagrama de bloques con un sensor de velocidad de rotación DRS y con una realización de una retroalimentación de fuerza de acuerdo con el estado de la técnica. El bloque VCO/NCO, oscilador controlado por tensión/digital, comprende un oscilador, que suministra la señal de funcionamiento con forma sinusoidal para la generación de la fuerza motriz F(t) para el elemento oscilador con la masa m. La frecuencia de la señal de funcionamiento y, por lo tanto, de la fuerza motriz F(t) se mantiene a través de un ajuste no representado sobre la frecuencia de resonancia del elemento oscilador, la amplitud de F(t) es estabilizada a través de un regulador de amplitudes que regula la amplitud de la señal de funcionamiento. Se conocen sensores de velocidad de rotación con retroalimentación de fuerza, por ejemplo, a partir de los documentos DE 102 37 410 A1 y DE 102 37 411 A1.
Si se realiza una retroalimentación de fuerza de tal manera que la velocidad de Coriolis vc medida de la masa de Coriolis mc se aplica a través de un circuito de ajuste sobre la entrada de fuerza Fc(t) en el sensor de velocidad de rotación DRS (figura 1), entonces se plantean problemas en la ejecución práctica. El regulador no puede presentar ninguna rotación de fases durante la frecuencia de resonancia. El regulador debe suprimir interferencias por encima y por debajo de la frecuencia de resonancia. Estos requerimientos solamente se pueden cumplir, por ejemplo, con un pasabanda de segundo orden o de orden superior a modo de regulador. Sin embargo, a tal fin el pasabanda debe poseer exactamente, respecto a la frecuencia de resonancia del oscilador, su frecuencia central. Pero puesto que las frecuencias de resonancia del oscilador de los sensores son dependientes de la carga y del muestreo, el pasabanda debería compensarse Individualmente de manera costosa.
Descripción de la Invención y sus ventajas
Los inconvenientes del estado de la técnica se solucionan mediante un procedimiento de acuerdo con la invención para el funcionamiento y para la evaluación simultánea de un sensor de velocidad de rotación que presenta al menos un elemento oscilador que puede operar a lo largo de un primer eje de oscilación para un movimiento de oscilación, así como al menos un elemento de Coriolis dispuesto sobre el elemento oscilador, dispuesto de forma adecuada para oscilar a lo largo de un segundo eje de oscilación que se extiende perpendicularmente al primer eje de oscilación, a través de las etapas del procedimiento:
- generación de una señal digital de funcionamiento con una frecuencia de oscilación que corresponde a la frecuencia de resonancia del elemento oscilador,
- conversión digital-analógica de la señal digital de funcionamiento y funcionamiento del elemento oscilador con la señal analógica de funcionamiento,
- detección de una velocidad de Coriolis del elemento de Coriolis, que aparece a través de una rotación del sensor de velocidad de rotación alrededor de un eje de rotación que se extiende perpendicularmente a los dos ejes de oscilación y generación de una señal analógica de Coriolis, proporcional a la velocidad de Coriolis,
- conversión analóglca-dlgltal de la señal analógica de Coriolis en una señal digital de Coriolis,
- multiplicación en fase de la señal digital de Coriolis con la señal digital de funcionamiento para la formación de una señal intermedia, que representa el valor medio de corta duración de la velocidad de Coriolis,
- generación de una señal de ajuste, proporcional a la velocidad de rotación de la rotación del sensor de velocidad de rotación, con la ayuda de la señal intermedia,
- multiplicación de la señal de ajuste con la señal digital de funcionamiento para obtener una señal digital de compensación, en coincidencia de fases con la señal digital de funcionamiento,
- conversión digital-analógica de la señal digital de compensación para obtener una señal de compensación analógica, en coincidencia de fases con la señal digital de funcionamiento, e impulsión del elemento de Coriolis con la señal de compensación analógica, para la generación de una fuerza de compensación, que puede ser generada preferentemente de forma electrostática, que contrarresta la aceleración de Coriolis que provoca la velocidad de Coriolis y que actúa sobre el elemento de Coriolis, así como
- emisión de la señal de ajuste.
El concepto de multiplicación de la fase correcta significa en este caso que la posición de las fases de la señal digital de funcionamiento... [Seguir leyendo]
Reivindicaciones:
1- Procedimiento para el funcionamiento y para la evaluación simultánea de un sensor de velocidad de rotación que presenta al menos un elemento oscilador que puede operar a lo largo de un primer eje de oscilación para un movimiento de oscilación, así como al menos un elemento de Coriolis dispuesto sobre el elemento oscilador, dispuesto apto para oscilar a lo largo de un segundo eje de oscilación que se extiende perpendicularmente al primer eje de oscilación, que comprende las etapas del procedimiento:
- generación de una señal digital de funcionamiento con una frecuencia de oscilación que corresponde a la frecuencia de resonancia del elemento oscilador,
- conversión digital-analógica de la señal digital de funcionamiento y funcionamiento del elemento oscilador con la señal analógica de funcionamiento,
- detección de una velocidad de Coriolis del elemento de Coriolis, que aparece a través de una rotación del sensor de velocidad de rotación alrededor de un eje de rotación que se extiende perpendicularmente a los dos ejes de oscilación y generación de una señal analógica de Coriolis, proporcional a la velocidad de Coriolis,
- conversión analógica-digital de la señal analógica de Coriolis, caracterizado por
- multiplicación en fase de la señal digital de Coriolis con la señal digital de funcionamiento para la formación de una
señal intermedia,
- generación de una señal de ajuste, proporcional a la velocidad de rotación del sensor de velocidad de rotación, con la ayuda de la señal intermedia,
- multiplicación de la señal de ajuste con la señal digital de funcionamiento para obtener una señal digital de compensación, en coincidencia de fases con la señal digital de funcionamiento,
- conversión digital-analógica de la señal digital de compensación para obtener una señal de compensación analógica, en coincidencia de fases con la señal digital de funcionamiento, y aplicación de la señal de compensación analógica al elemento Coriolis, así como
- emisión de la señal de ajuste.
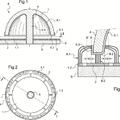
2.- Procedimiento de acuerdo con la reivindicación 1, en el que para la multiplicación en fase de la señal digital de Coriolis con la señal digital de funcionamiento se alimente la señal digital de funcionamiento a la multiplicación con una latencia en un intervalo de tiempo que corresponda a la suma de los tiempos de conversión de la conversión digital-analógica de la señal digital de funcionamiento con la señal analógica de funcionamiento y de la conversión analógica-digital de la señal analógica de Coriolis con la señal digital de Coriolis.
3.- Procedimiento de acuerdo con una de las reivindicaciones 1 ó 2, en el que antes de la generación de la señal de ajuste se filtran las frecuencias que exceden la frecuencia de excitación de la señal de funcionamiento, por ejemplo por medio de un filtro de paso bajo desde la señal intermedia.
4.- Procedimiento de acuerdo con una de las reivindicaciones 1, 2 ó 3, en el que la señal de ajuste es reducida antes de la emisión a un ancho de banda deseado.
5.- Procedimiento de acuerdo con una de las reivindicaciones anteriores, en el que la generación de la señal de ajuste se realiza a través de una adición ponderada de la señal intermedia y de una integral temporal de la señal intermedia.
6.- Disposición de circuito para la realización del procedimiento de acuerdo con una de las reivindicaciones 1 a 5, caracterizada por
- medios para la generación de una señal digital de funcionamiento con una frecuencia de excitación que corresponde a la frecuencia de resonancia de un elemento oscilador de un sensor de velocidad de rotación,
- medios para la conversión digital-analógica de la señal digital de funcionamiento en una señal analógica de funcionamiento para el funcionamiento del elemento oscilador del sensor de velocidad de rotación,
- medios para la detección de una velocidad de Coriolis que aparece a través de una rotación del sensor de velocidad de rotación y para la generación de una señal analógica de Coriolis, proporcional a la velocidad de Coriolis,
- medios para la conversión analógica-digital de la señal analógica de Coriolis en una señal digital de Coriolis,
- medios para la multiplicación en fase de la señal digital de funcionamiento con la señal de Coriolis en forma de una señal intermedia,
- medios para la generación de una señal de ajuste, proporcional a la velocidad de rotación del sensor de velocidad de rotación, con la ayuda de la señal intermedia,
- medios para la multiplicación de la señal de ajuste con la señal digital de funcionamiento para obtener una señal digital de compensación, en coincidencia de fases con la señal digital de funcionamiento,
- medios para la conversión digital-analógica de la señal digital de compensación para obtener una señal de compensación analógica, en coincidencia de fases con la señal digital de funcionamiento, y aplicación de la señal de compensación analógica al elemento Coriolis, así como
- medios para la emisión de la señal de ajuste.
7 - Disposición de circuito de acuerdo con la reivindicación 6, caracterizada porque los medios para la generación de una señal de ajuste proporcional a la velocidad de rotación comprenden medios para la integración temporal de la
señal intermedia.
8 - Disposición de circuito de acuerdo con la reivindicación 7, caracterizada porque los medios para la integración temporal de la señal intermedia comprenden un regulador proporcional integral.
9.- Disposición de circuito de acuerdo con la reivindicación 6, 7 u 8, caracterizada porque los medios para la multiplicación en coincidencia de fases de la señal digital de funcionamiento con la señal de Coriolis digitalizada comprenden un elemento de latencia, que ejecuta una latencia de la señal digital de funcionamiento que alimenta a la multiplicación en un intervalo de tiempo que corresponde a la suma de los tiempos de conversión de la señal digital de funcionamiento con la señal analógica de funcionamiento y de la señal analógica de Coriolis con la señal digital de Coriolis.
10.- Disposición de circuito de acuerdo con una de las reivindicaciones 6 a 9, caracterizada porque entre los medios para la multiplicación en fase y los medios para la generación de una señal de ajuste proporcional a la velocidad de rotación del sensor de velocidad de rotación está dispuesto un filtro de paso bajo.
11.- Disposición de circuito de acuerdo con una de las reivindicaciones 6 a 10, caracterizada porque los medios para la emisión de la señal de ajuste comprenden un filtro de paso bajo.
12.- Disposición de circuito de acuerdo con una de las reivindicaciones 6 a 11, caracterizada por medios para el filtrado de paso bajo de la señal intermedia.
Patentes similares o relacionadas:
Compensación de sesgo electrónica para un giroscopio, del 8 de Enero de 2020, de THE BOEING COMPANY: Metodo para compensar el sesgo de un giroscopio vibratorio de Coriolis que tiene una unidad de control, un armazon y un elemento […]
 Resonador con una capa metalizada parcial, del 31 de Julio de 2019, de Safran Electronics & Defense: Un resonador semiesférico que comprende una campana sujeta a una base que porta electrodos principales enfrentados a un borde anular de […]
Resonador con una capa metalizada parcial, del 31 de Julio de 2019, de Safran Electronics & Defense: Un resonador semiesférico que comprende una campana sujeta a una base que porta electrodos principales enfrentados a un borde anular de […]
Procedimiento de funcionamiento de medida preciso de un sensor micromecánico de velocidad de rotación, del 9 de Enero de 2019, de CONTINENTAL TEVES AG & CO. OHG: Procedimiento de funcionamiento de medida preciso de un sensor micromecánico de velocidad de rotación que comprende al menos una masa sísmica suspendida […]
Unidad de medición inercial de aeronave no tripulada, del 21 de Diciembre de 2018, de SZ DJI Technology Co., Ltd: Una unidad de medición de inercia para una aeronave no tripulada, que comprende un conjunto de alojamiento, un conjunto de detección y un amortiguador […]
 Dispositivo de medición con un sensor capacitivo microelectromecánico, del 2 de Marzo de 2016, de Albert-Ludwigs-Universität Freiburg: Dispositivo de medición con al menos un sensor capacitivo microelectromecánico (9a, 9b) que, para la medición de una desviación mecánica de una masa de prueba […]
Dispositivo de medición con un sensor capacitivo microelectromecánico, del 2 de Marzo de 2016, de Albert-Ludwigs-Universität Freiburg: Dispositivo de medición con al menos un sensor capacitivo microelectromecánico (9a, 9b) que, para la medición de una desviación mecánica de una masa de prueba […]
Corrección de errores para giroscopio de velocidad vibratoria, del 15 de Julio de 2015, de THOMSON LICENSING: Un circuito de procesamiento síncrono para procesar señales procedentes de un sensor de velocidad rotacional, en donde el sensor proporciona […]
Sensor micromecánico oscilante de velocidad angular, del 9 de Abril de 2014, de Murata Electronics Oy: Sensor micromecánico oscilante de velocidad angular que comprende dos masas sísmicas , , , , y un resorte de conexión entre las masas sísmicas , , , […]
 PROCEDIMIENTO DE CALIBRADO DE UN FACTOR DE ESCALA DE UN GIRÓMETRO VIBRANTE AXIALMENTE SIMÉTRICO, del 4 de Marzo de 2011, de SAGEM DEFENSE SECURITE: Procedimiento de calibrado de un factor de escala de un girómetro vibrante axialmente simétrico que funciona por la aplicación de una señal de control de amplitud […]
PROCEDIMIENTO DE CALIBRADO DE UN FACTOR DE ESCALA DE UN GIRÓMETRO VIBRANTE AXIALMENTE SIMÉTRICO, del 4 de Marzo de 2011, de SAGEM DEFENSE SECURITE: Procedimiento de calibrado de un factor de escala de un girómetro vibrante axialmente simétrico que funciona por la aplicación de una señal de control de amplitud […]