Corrección de errores para giroscopio de velocidad vibratoria.
Un circuito de procesamiento síncrono para procesar señales procedentes de un sensor de velocidad rotacional,
en donde el sensor (1305) proporciona una primera y una segunda señales de detección, teniendo la primera y la segunda señales de detección al menos una componente de fuera de fase con una oscilación del sensor (1305), y proporciona además una señal oscilante sincronizada con la oscilación del sensor, comprendiendo además el circuito un primer circuito de escalado (1410) acoplado al sensor (1305) para escalar la señal oscilante en respuesta a un primer factor de escalado programable, un segundo circuito de escalado (1460) acoplado al sensor (1305) para escalar la señal oscilante en respuesta a un segundo factor de escalado programable, un primer circuito de combinación (14110) acoplado al primer circuito de escalado (1410) y al sensor (1305) para sumar la primera señal oscilante escalada a la primera señal de detección, y un segundo circuito de combinación (14120) acoplado al segundo circuito de escalado (1460) y al sensor (1305) para sumar la segunda señal oscilante escalada a la segunda señal de detección, en donde el primer y el segundo circuitos de combinación (14110, 14120) son operables para eliminar errores de cuadratura en la primera y la segunda señales de detección, estando dichos errores de cuadratura en fase con la oscilación del sensor (1305).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2005/008372.
Solicitante: THOMSON LICENSING.
Nacionalidad solicitante: Francia.
Dirección: 1-5, RUE JEANNE D'ARC 92130 ISSY-LES-MOULINEAUX FRANCIA.
Inventor/es: HOTELLING,STEVEN PORTER, BAYER,LEX, LAND,BRIAN R.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C19/56 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 19/00 Giróscopos; Dispositivos sensibles al giro con masas vibratorias; Dispositivos sensibles al giro sin masas móviles; Medida de velocidad angular usando efectos giroscópicos. › Dispositivos sensibles al giro con masas vibratorias, p. ej. sensores de velocidad vibratoria angular sobre la base de las fuerzas de Coriolis.
PDF original: ES-2545768_T3.pdf
Fragmento de la descripción:
Corrección de errores para giroscopio de velocidad vibratoria Campo de la invención La presente invención se refiere al campo de los sensores de velocidad rotacional que incluyen resonadores vibrantes.
Antecedentes de la invención Los sensores de velocidad rotacional con resonadores vibrantes, conocidos también como "giroscopios de velocidad vibratoria", miden velocidades rotacionales directamente detectando fuerzas generadas por los elementos vibrantes en respuesta a la rotación del sensor. Se han desarrollado diversas configuraciones de elementos vibratorios para su uso en giroscopios de velocidad vibratoria, incluyendo las estructuras de horquilla de sintonización suspendida, vigas vibrantes y anillos vibrantes. Estos elementos son inducidos en resonancia y se mide el movimiento de los elementos en respuesta a la rotación para determinar las fuerzas que actúan sobre los elementos y la rotación del sensor.
Un ejemplo de circuito de procesamiento para un sensor de velocidad inercial ha sido mostrado en el documento EP 1189025 (BEI Technologies, Inc) . El documento EP 1189025 parece estar dirigido a un sensor de velocidad inercial que incorpora alguna construcción en funciones de prueba. El documento EP 1189025 incluye un único sensor acoplado a un oscilador de excitación junto con otra circuitería asociada.
Un giroscopio de velocidad vibratoria ilustrativo, que tiene un elemento de horquilla de sintonización, ha sido enseñado por el documento USP 5.698.784, Giroscopio de Velocidad Vibratoria y Métodos de Montaje y Operación, concedida a Steven P. Hotelling y Brian R. Land, 16 de Diciembre de 1997. El giroscopio de Hotelling-Land utiliza dos elementos vibratorios, uno para detectar el movimiento en torno a cada uno de dos ejes rotacionales diferentes. Sin embargo, este diseño no solo requiere el uso de dos horquillas de sintonización, sino que las dos horquillas de sintonización deben operar a diferentes frecuencias con el fin de minimizar la diafonía entre las unidades. Desde una perspectiva de complejidad y compacidad, resulta deseable disponer de un giroscopio que sea capaz de detectar la rotación en torno a dos ejes que requiera solamente un elemento vibrante.
Una dificultad de los sensores de velocidad vibratoria se deriva del hecho de que el movimiento vibratorio inducido en muy grande en comparación con las fuerzas y el movimiento resultantes de la rotación. Pequeñas cantidades de desalineamiento del transductor mecánico pueden dar como resultado un movimiento inducido grande, ocasionando errores en las pequeñas señales que están siendo detectadas sobre los otros ejes. Típicamente, estos errores se corrigen mecánicamente, ajustando los sensores y/o recortando el material de los elementos vibrantes. Sin embargo, tal recorte y ajuste mecánico consumen tiempo y son caros. Resulta deseable proporcionar corrección automática de errores electrónicamente y proporcionar además corrección que compense a través de una amplia variación en condiciones operativas.
También resulta deseable proporcionar un sensor de velocidad rotacional que sea pequeño, barato de fabricar, que sea adaptable a una amplia gama de aplicaciones, y que sea integrado fácilmente con microelectrónica. Tal adaptabilidad podría incluir preferentemente la capacidad de ajustar el ancho de banda del sensor y proporcionar una salida uniforme desde un número de sensores. La presente invención está dirigida a proporcionar esas ventajas.
Sumario de la invención La realización preferida de la presente invención comprende un circuito de corrección electrónica síncrono para un sensor de velocidad rotacional vibratoria de doble eje. Un diseño híbrido analógico/digital proporciona corrección de errores mediante la adición de señales de corrección sintetizadas enfasadas en el dominio analógico con anterioridad a la digitalización. La corrección de errores, la demodulación de la señal y las conversiones de datos, están sincronizadas con la vibración detectada del conjunto vibratorio para proporcionar referencias de fase precisas.
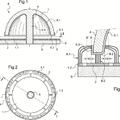
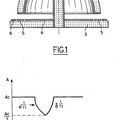
Breve descripción de los dibujos La Figura 1 es una vista despiezada de un conjunto vibratorio 100;
La Figura 2 es una ilustración de una vista superior de un elemento de viga 150;
La Figura 3 ilustra un conjunto vibratorio ensamblado;
La Figura 4 es una vista lateral del conjunto vibratorio 100 que ilustra movimiento de contrafase;
La Figura 5 es un dibujo en perspectiva que ilustra el movimiento del conjunto vibratorio 100 en respuesta a la rotación en torno a los ejes X y/o Y. Este movimiento se menciona como "modo de detección";
La Figura 6 es una vista lateral que ilustra el movimiento del conjunto vibratorio 100 en el modo "en-fase";
La Figura 7 es un dibujo en perspectiva del conjunto vibratorio 100 montado en una placa de montaje 700;
La Figura 8 es un dibujo en perspectiva del conjunto 800 del lado de excitación según una vista despiezada;
La Figura 9 es un dibujo en perspectiva del conjunto 900 del lado de detección según una vista despiezada;
La Figura 10 es una vista despiezada de la PCB de señal 1010;
La Figura 11 es una vista despiezada del conjunto suspendido 1110;
La Figura 12 es una vista despiezada del conjunto final 1200;
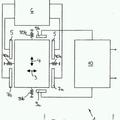
La Figura 13 es un diagrama esquemático lógico de ASIC 1030;
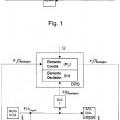
La Figura 14 es una vista esquemática detallada de la combinación y escalado de DACs 1340 y de la circuitería anexa.
Descripción detallada de la realización preferida Las características y ventajas de la presente invención se pondrán de relieve a partir de la descripción detallada que sigue, dada a título de ejemplo de un ejemplo de sensor de velocidad rotacional conforme a los principios de la presente invención.
La Figura 1 es una vista despiezada de un conjunto vibratorio 100, el cual incluye imanes permanentes cilíndricos 110 y 120, soportes de imán 130 y 140, y una estructura de viga planar 150. Los imanes 110 y 120 están con preferencia alineados según se ha ilustrado, con los polos orientados en una dirección común, de tal modo que sus campos magnéticos se refuerzan entre sí.
En la Figura 2 se ha proporcionado una vista superior de la estructura de viga 150. La estructura de viga 150 tiene una forma hexagonal axialmente simétrica y está compuesta por varias vigas arrolladas en serpentín plegadas simétricamente en torno al eje Z. Las vigas 210-265 operan a modo de brazos de resorte para proporcionar fuerzas de recuperación en el conjunto vibratorio 100. Los contactos 210c-235c de los extremos de las vigas proporcionan posiciones de montaje de los dos soportes de imán 130 y 140. Los puntos de montaje 240m-265m proporcionan posiciones para fijar un conjunto externo.
Haciendo ahora referencia a las Figuras 1-3, tres vigas en serpentín 210, 215, y 220 están conectadas a un soporte de imán 130 en puntos de contacto 210c, 215c y 220c. El soporte de imán 140 está conectado de una manera similar a tres extremos de viga intercalados 225c, 230c y 235c, por el lado opuesto de la estructura de viga 150. Este montaje, y el aligeramiento en los soportes de imán 130 y 140, permiten que los soportes de imán 130 y 140 se muevan libremente cada uno respecto al otro, ambos dentro y fuera del plano de la estructura de viga 150. Específicamente, los soportes de imán 130 y 140 pueden moverse cada uno hacia el otro a lo largo del eje Z sin interferencia durante una distancia suficiente para la operación del conjunto vibratorio 100.
Los soportes de imán 130 y 140 están formados a partir de material no magnético, tal como determinados aceros inoxidables, y están sujetos a la estructura de viga 150. Los imanes 110 y 120 están fijados en el interior de los soportes de imán 130 y 140. Las 6 restantes vigas en serpentín están montadas en un conjunto externo en puntos de montaje 240m, 245m, 250m, 255m, 260m y 265m.
Durante el funcionamiento, los imanes 110 y 120 son inducidos hacia un movimiento en contrafase a lo largo del eje Z según se ha ilustrado en la Figura 4. El movimiento de contrafase es un movimiento sinusoidal resonante forzado a lo largo del eje Z en donde los imanes 110 y 120 se separan y después se juntan, secuencialmente, a lo largo del eje Z.
En general, Los sensores de velocidad rotacional vibratoria miden la velocidad de rotación del sensor detectando la fuerza ejercida sobre una masa que se mueve en dirección lineal dentro del marco de referencia rotatorio del sensor. Esta fuerza se conoce habitualmente como "fuerza de Coriolis", y viene descrita por la ecuación:
FCoriolis = -2 m ( x ) (Ecuación 1)
donde m es la masa del objeto en movimiento, es el vector velocidad del... [Seguir leyendo]
Reivindicaciones:
1. Un circuito de procesamiento síncrono para procesar señales procedentes de un sensor de velocidad rotacional, en donde el sensor (1305) proporciona una primera y una segunda señales de detección, teniendo la primera y la segunda señales de detección al menos una componente de fuera de fase con una oscilación del sensor (1305) , y proporciona además una señal oscilante sincronizada con la oscilación del sensor, comprendiendo además el circuito un primer circuito de escalado (1410) acoplado al sensor (1305) para escalar la señal oscilante en respuesta a un primer factor de escalado programable, un segundo circuito de escalado (1460) acoplado al sensor (1305) para escalar la señal oscilante en respuesta a un segundo factor de escalado programable, un primer circuito de combinación (14110) acoplado al primer circuito de escalado (1410) y al sensor (1305) para sumar la primera señal oscilante escalada a la primera señal de detección, y un segundo circuito de combinación (14120) acoplado al segundo circuito de escalado (1460) y al sensor (1305) para sumar la segunda señal oscilante escalada a la segunda señal de detección, en donde el primer y el segundo circuitos de combinación (14110, 14120) son operables para eliminar errores de cuadratura en la primera y la segunda señales de detección, estando dichos errores de cuadratura en fase con la oscilación del sensor (1305) .
2. Un circuito de procesamiento síncrono según la reivindicación 1, comprendiendo además el circuito un tercer circuito de escalado (1480) para escalar la primera señal de detección en respuesta a un tercer factor de escalado, y un cuarto circuito de escalado (1430) para escalar la segunda señal de detección en respuesta a un cuarto factor de escalado, en donde el primer circuito de combinación suma además la segunda señal de detección escalada a la primera señal de detección, y el segundo circuito de combinación suma la primera señal de detección escalada a la segunda señal de detección.
3. Un circuito de procesamiento síncrono según la reivindicación 2, que comprende además dos demoduladores, uno acoplado para desmodular cada una de las señales de detección combinadas con una señal periódica enganchada en fase a la señal oscilante.
4. Un circuito de procesamiento síncrono según la reivindicación 3, en donde los demoduladores pueden operar selectivamente en fase con relación a la señal oscilante, y en donde el primer factor de escalado se determina en respuesta a la salida del demodulador acoplado para recibir la primera señal de detección combinada, y el segundo factor de escalado se determina en respuesta a la salida del demodulador acoplado para recibir la segunda señal de detección combinada.
5. Un circuito de procesamiento síncrono según la reivindicación 3, que comprende además dos convertidores analógico-digitales (1350, 1360) , uno de ellos acoplado para rectificar e integrar la primera señal de detección desmodulada a través de un intervalo sincronizado con la señal oscilante, y el otro acoplado para rectificar e integrar la segunda señal de detección desmodulada a través de un intervalo sincronizado con la señal oscilante.
6. Un circuito de procesamiento síncrono según la reivindicación 5, en donde los demoduladores pueden operar selectivamente en fase con relación a la señal oscilante, y en donde el primer factor de escalado se determina en respuesta a la salida del convertidor analógico-digital acoplado para recibir la primera señal de detección combinada y desmodulada y el segundo factor de escalado se determina en respuesta a la salida del convertidor analógicodigital acoplado para recibir la segunda señal de detección combinada y desmodulada.
7. Un método para procesar señales procedentes de un sensor de velocidad rotacional, en donde el sensor proporciona una primera y una segunda señales de detección, teniendo la primera y la segunda señales de detección al menos una componente de fuera de fase con una oscilación del sensor, y además proporciona una señal oscilante sincronizada con la oscilación del sensor, comprendiendo el método las etapas de escalar la señal oscilante en respuesta a un primer factor de escalado programable, escalar la señal oscilante en respuesta a un segundo factor de escalado programable, combinar la primera señal oscilante escalada con la primera señal de detección, y combinar la segunda señal oscilante escalada con la segunda señal de detección, en donde las etapas de combinar proporcionan compensación para la eliminación de errores de cuadratura en la primera y la segunda señales de detección, estando dichos errores de cuadratura en fase con la oscilación del sensor (1305) .
8. Un método para procesar señales procedentes de un sensor de velocidad rotacional según la reivindicación 7, que comprende además las etapas de determinar el primer y el segundo factor de escalado con el fin de minimizar la componente de error de las señales de detección en fase con la señal oscilante.
9. Un método para procesar señales procedentes de un sensor de velocidad rotacional según la reivindicación 8, que comprende además las etapas de escalar la primera señal de detección en respuesta a un tercer factor de escalado, escalar la segunda señal de detección en respuesta a un cuarto factor de escalado, en donde la etapa de combinar realiza además la suma de segunda señal de detección escalada con la primera señal de detección, y la otra etapa de combinar suma la primera señal de detección escalada con la segunda señal de detección.
10. Un método para procesar señales procedentes de un sensor de velocidad rotacional según la reivindicación 7, que comprende además la etapa de desmodular la señal de detección escalada y combinada con una señal periódica enganchada en fase con la señal oscilante.
11. Un método para procesar señales procedentes de un sensor de velocidad rotacional según la reivindicación 10, que incluye además la etapa de desmodular selectivamente la señal de detección escalada y combinada con una señal periódica que tiene la fase en cuadratura con relación a la señal oscilante, y en donde la etapa de determinar el primer factor de escalado es una respuesta a la salida de la etapa de demodulación.
Patentes similares o relacionadas:
Compensación de sesgo electrónica para un giroscopio, del 8 de Enero de 2020, de THE BOEING COMPANY: Metodo para compensar el sesgo de un giroscopio vibratorio de Coriolis que tiene una unidad de control, un armazon y un elemento […]
 Resonador con una capa metalizada parcial, del 31 de Julio de 2019, de Safran Electronics & Defense: Un resonador semiesférico que comprende una campana sujeta a una base que porta electrodos principales enfrentados a un borde anular de […]
Resonador con una capa metalizada parcial, del 31 de Julio de 2019, de Safran Electronics & Defense: Un resonador semiesférico que comprende una campana sujeta a una base que porta electrodos principales enfrentados a un borde anular de […]
Procedimiento de funcionamiento de medida preciso de un sensor micromecánico de velocidad de rotación, del 9 de Enero de 2019, de CONTINENTAL TEVES AG & CO. OHG: Procedimiento de funcionamiento de medida preciso de un sensor micromecánico de velocidad de rotación que comprende al menos una masa sísmica suspendida […]
Unidad de medición inercial de aeronave no tripulada, del 21 de Diciembre de 2018, de SZ DJI Technology Co., Ltd: Una unidad de medición de inercia para una aeronave no tripulada, que comprende un conjunto de alojamiento, un conjunto de detección y un amortiguador […]
 Dispositivo de medición con un sensor capacitivo microelectromecánico, del 2 de Marzo de 2016, de Albert-Ludwigs-Universität Freiburg: Dispositivo de medición con al menos un sensor capacitivo microelectromecánico (9a, 9b) que, para la medición de una desviación mecánica de una masa de prueba […]
Dispositivo de medición con un sensor capacitivo microelectromecánico, del 2 de Marzo de 2016, de Albert-Ludwigs-Universität Freiburg: Dispositivo de medición con al menos un sensor capacitivo microelectromecánico (9a, 9b) que, para la medición de una desviación mecánica de una masa de prueba […]
 Sensor de velocidad de rotación, del 9 de Septiembre de 2015, de ROBERT BOSCH GMBH: Procedimiento para el funcionamiento y para la evaluación simultánea de un sensor de velocidad de rotación que presenta al menos un elemento oscilador que puede operar a lo […]
Sensor de velocidad de rotación, del 9 de Septiembre de 2015, de ROBERT BOSCH GMBH: Procedimiento para el funcionamiento y para la evaluación simultánea de un sensor de velocidad de rotación que presenta al menos un elemento oscilador que puede operar a lo […]
Sensor micromecánico oscilante de velocidad angular, del 9 de Abril de 2014, de Murata Electronics Oy: Sensor micromecánico oscilante de velocidad angular que comprende dos masas sísmicas , , , , y un resorte de conexión entre las masas sísmicas , , , […]
 PROCEDIMIENTO DE CALIBRADO DE UN FACTOR DE ESCALA DE UN GIRÓMETRO VIBRANTE AXIALMENTE SIMÉTRICO, del 4 de Marzo de 2011, de SAGEM DEFENSE SECURITE: Procedimiento de calibrado de un factor de escala de un girómetro vibrante axialmente simétrico que funciona por la aplicación de una señal de control de amplitud […]
PROCEDIMIENTO DE CALIBRADO DE UN FACTOR DE ESCALA DE UN GIRÓMETRO VIBRANTE AXIALMENTE SIMÉTRICO, del 4 de Marzo de 2011, de SAGEM DEFENSE SECURITE: Procedimiento de calibrado de un factor de escala de un girómetro vibrante axialmente simétrico que funciona por la aplicación de una señal de control de amplitud […]