Procedimiento de regulación para direcciones asistidas.
Procedimiento de regulación para un sistema de dirección con asistencia de fuerza auxiliar eléctrica que comprende:
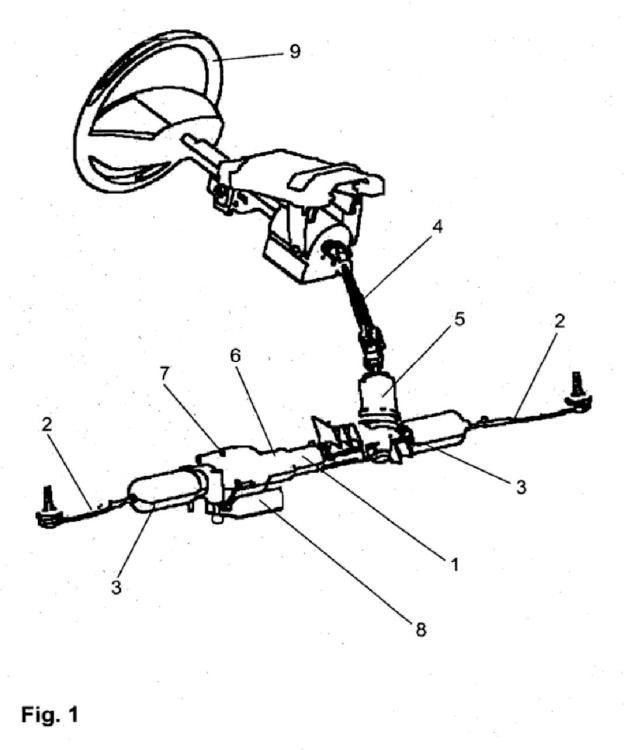
- un volante (9) que puede controlarse por un conductor,
- un motor de fuerza auxiliar (26) eléctrico,
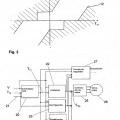
- una unidad de control (20) eléctrica que contiene una memoria para almacenar datos digitales, - un controlador de motor (25) que basándose en un momento de torsión de motor teórico (TRA) que se transmitió al controlador de motor (25) determina señales eléctricas para la excitación del motor de fuerza auxiliar (26) y las emite a este,
- al menos un dispositivo de sensor (5) para determinar una magnitud de control (TTS) introducida en el volante (9), por ejemplo un momento de torsión manual,
- determinándose en la unidad de control (20) con la ayuda de la magnitud de control (TTS) un valor predeterminado (TRM) para un momento de torsión de motor del motor de fuerza auxiliar (26),
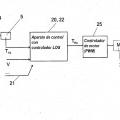
- un miembro de limitación (22) en el que está almacenado un valor límite superior (max) para el momento de torsión de motor teórico (TRA), y
- para un caso A en el que el valor predeterminado (TRM) supera el valor límite superior (max), el miembro de limitación (22) emite el valor límite superior (max) como momento de torsión de motor teórico (TRA) al controlador de motor (25), y
- para un caso B en el que el valor predeterminado (TRM) no supera el valor límite superior (max), el miembro de limitación (22) emite el valor predeterminado como momento de torsión de motor teórico al controlador de motor (25),
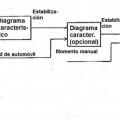
- caracterizado porque están previstos un miembro de amortiguación (23) y un miembro de estabilización (24) que generan señales de amortiguación y de estabilización, emitiéndose la suma de las señales de salida del miembro de limitación (22), del miembro de amortiguación (23) y del miembro de estabilización (24) como momento de torsión de motor teórico (TRA) al controlador de motor (25).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/005847.
Solicitante: THYSSENKRUPP PRESTA AG.
Nacionalidad solicitante: Liechtensein.
Dirección: 9492 Eschen LIECHTENSTEIN.
Inventor/es: SZEPESSY,IMRE, STERNECKER,BERND, DANNOEHL,CAROLINE, LOHNINGER,ROLAND, VARGA,ADAM.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D5/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
PDF original: ES-2549487_T3.pdf


Fragmento de la descripción:
Procedimiento de regulación para direcciones asistidas La presente invención se refiere a un procedimiento de regulación para un sistema de dirección con asistencia de fuerza auxiliar eléctrica con las características del preámbulo de la reivindicación 1.
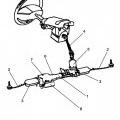
Las direcciones de automóviles con servoasistencia eléctrica presentan en general una columna de dirección que está conectada mediante un engranaje de dirección a las ruedas dirigidas del automóvil. Las columna de dirección contiene un sensor de momento de torsión para el momento de torsión que el conductor introduce en la dirección. Además está previsto un servomotor eléctrico que mediante un engranaje reductor acciona el engranaje de dirección y asiste al conductor en la operación de dirección. Una regulación es necesaria para que el servomotor genere exactamente la fuerza de asistencia que es necesaria para alcanzar una característica de dirección determinada. Por ejemplo, en el caso de velocidades bajas y altos momentos de torsión debe generarse una fuerza de asistencia alta para aliviar al conductor a la hora de aparcar, y en el caso de velocidades más altas y momentos de torsión reducidos debe generarse una fuerza de asistencia reducida para que el conductor reciba una sensación de dirección directa. Un aspecto muy importante consiste en que las funciones erróneas del sensor, del sistema de control y del motor eléctrico no llevan a que el motor eléctrico realice operaciones de dirección no deseadas e inesperadas.
El objetivo general para regulaciones consiste por tanto en crear una función segura frente interferencias de la dirección asistida eléctrica. El documento de patente alemana DE 100 636 05 B4 prevé que un motor eléctrico se controle mediante un controlador. Adicionalmente está previsto un dispositivo de limitación de controlador para limitar el accionamiento del motor eléctrico. El dispositivo de limitación de controlador desconecta completamente el controlador de motor en el caso de un error detectado. Esto corresponde en el funcionamiento de la marcha a una pérdida completa y repentina de la servoasistencia. Esto puede resultar irritante para un conductor.
El documento de divulgación alemán DE 198 21 220 A1 prevé limitar la corriente de motor con un valor límite superior. De esta manera deben impedirse sobreoscilaciones de la fuerza de asistencia. Este límite se determina basándose en la fuerza contraelectromotriz. Con ello sin embargo no es posible absorber oscilaciones en el propio regulador. Las oscilaciones pueden atribuirse a diferentes causas. El conductor puede mover el volante de un lado a otro innecesariamente. La superficie de la carretera puede presentar variaciones que introducen magnitudes perturbadoras correspondientes en el sistema de regulación. Las ruedas dirigidas del automóvil pueden presentar un desequilibrio que generan a su vez interferencias periódicas. Tales oscilaciones no pueden absorberse a través de una limitación de la corriente del motor. El documento no prevé tampoco ningún límite inferior para la corriente de motor de manera que el momento de asistencia puede llegar a cero. Esto corresponde al caso anteriormente descrito de una caída completa y repentina de la servoasistencia.
Una solución similar está descrita en el documento estadounidense US 6.404.156 B1. En este, la limitación de la fuerza de asistencia se produce a través de valores límite superiores e inferiores para la corriente de motor. En la cadena del sistema de control electrónico que comprende los diferentes sensores (sensores de momento de torsión, sensor de velocidad) , un amplificador con compensaciones de fase, un excitador de motor y el servomotor mismo, en la etapa del amplificador y de la compensación de fases se procesan los valores de sensor sin limitación especificada y se transmiten al excitador. El excitador limita el intervalo de valores de la señal de control para el accionamiento del motor eléctrico para evitar corrientes de motor demasiado altas o demasiado bajas y por tanto momentos de asistencia demasiado altos y demasiado bajos.
Las direcciones de acuerdo con el estado de la técnica descrito presentan las siguientes limitaciones de la dinámica de la marcha:
Las desviaciones de acuerdo con el documento DE 100 636 05 B4 y el documento DE 198 21 220 A1 limitan el intervalo de valores para la corriente de motor posible en determinadas situaciones de la marcha. Por ello se limita también la potencia del motor máxima posible y por tanto la servoasistencia máxima. En situaciones extremas, como por ejemplo maniobras de desviación o también acciones extremas impredecibles sobre las ruedas dirigidas esto puede llevar a que en el volante aparezca un momento manual más alto de lo que realmente sería necesario debido a la situación de la marcha y de la potencia técnicamente disponible del servomotor. Las direcciones no aprovechan por lo tanto en algunas situaciones todo el intervalo de la dinámica de la servo unidad.
Acorde con un ejemplo de realización adicional de la dirección de acuerdo con el documento US 6, 404, 156 B1 la señal de sensor que se emite por el sensor de momento de torsión de la dirección al sistema de control de la dirección se limita en función de determinados parámetros. Por ello se pierden informaciones sobre valores extremos del sensor de momento de torsión que pueden aparecer, por ejemplo, cuando el conductor con un momento manual muy alto acciona el volante (maniobra de desviación) o cuando actúan influencias externas sobre la dirección (baches, contacto con bordillo, defecto repentino de las ruedas) . El sistema de control debido a la señal de sensor limitada anteriormente no puede detectar tales situaciones y por lo tanto no puede reaccionar apropiadamente a estas situaciones. Una reacción apropiada sería en los casos mencionados el aumento del
momento de asistencia hasta el valor máximo técnicamente posible para mantener el momento manual en el volante en límites especificados. Esto no es posible en el caso de una limitación de la señal de sensor por el sistema de control. Por lo tanto esta dirección tampoco aprovecha el intervalo de dinámica totalmente técnicamente disponible del servoaccionamiento.
Por el documento genérico DE 11 2005 000 670 T5 se conoce una dirección asistida eléctrica con una regulación en la que una unidad de limitación limita la subida del momento de torsión auxiliar teórico a un valor límite de momento de torsión auxiliar de destino. No se dan a conocer precauciones especiales para la estabilización de la regulación en este documento.
El documento DE 100 35 356 A1 divulga un procedimiento de regulación para un sistema de dirección con asistencia de fuerza auxiliar eléctrica que comprende un volante que puede controlarse por un conductor, un motor de fuerza auxiliar eléctrico, una unidad de control eléctrica que contiene una memoria para almacenar datos digitales, un controlador de motor que sobre la base de un momento de torsión de motor teórico que se transmitió al controlador de motor determina señales eléctricas para excitar el motor de fuerza auxiliar y las emite a este, al menos un dispositivo de sensor para determinar una magnitud de control introducida en el volante, por ejemplo de un momento de torsión manual, determinándose en la unidad de control con ayuda de la magnitud de control un valor predeterminado para un momento de torsión de motor del motor de fuerza auxiliar, caracterizado porque está previsto un miembro de limitación en el que está almacenado un valor límite superior para el momento de torsión de motor teórico y para un caso A en el que el valor predeterminado supera el valor límite superior el miembro de delimitación emite el valor límite superior como momento de torsión de motor teórico al controlador de motor, y para el caso B en el que el valor predeterminado no supera el valor límite superior, el miembro de limitación emite el valor predeterminado como momento de torsión de motor teórico al controlador de motor.
Por lo tanto el objetivo de la presente invención es facilitar un procedimiento de regulación para una dirección asistida eléctrica que contiene también en situaciones de dirección críticas la estabilidad de la marcha y aumente la tolerancia a fallos. En particular ha de crearse una regulación para una dirección asistida eléctrica que pueda aprovechar completamente el intervalo de dinámica disponible del servoaccionamiento y su regulación es especialmente estable.
Este objetivo se resuelve por un procedimiento de regulación con las características de la reivindicación 1. En las reivindicaciones 2 a 6 están representados perfeccionamientos ventajosos de la invención.
En un procedimiento de regulación... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de regulación para un sistema de dirección con asistencia de fuerza auxiliar eléctrica que comprende:
- un volante (9) que puede controlarse por un conductor, -un motor de fuerza auxiliar (26) eléctrico, -una unidad de control (20) eléctrica que contiene una memoria para almacenar datos digitales, -un controlador de motor (25) que basándose en un momento de torsión de motor teórico (TRA) que se transmitió al controlador de motor (25) determina señales eléctricas para la excitación del motor de fuerza auxiliar (26) y las emite a este, -al menos un dispositivo de sensor (5) para determinar una magnitud de control (TTS) introducida en el volante (9) , por ejemplo un momento de torsión manual, -determinándose en la unidad de control (20) con la ayuda de la magnitud de control (TTS) un valor predeterminado (TRM) para un momento de torsión de motor del motor de fuerza auxiliar (26) , -un miembro de limitación (22) en el que está almacenado un valor límite superior (max) para el momento de torsión de motor teórico (TRA) , y -para un caso A en el que el valor predeterminado (TRM) supera el valor límite superior (max) , el miembro de limitación (22) emite el valor límite superior (max) como momento de torsión de motor teórico (TRA) al controlador de motor (25) , y -para un caso B en el que el valor predeterminado (TRM) no supera el valor límite superior (max) , el miembro de limitación (22) emite el valor predeterminado como momento de torsión de motor teórico al controlador de motor (25) , -caracterizado porque están previstos un miembro de amortiguación (23) y un miembro de estabilización (24) que generan señales de amortiguación y de estabilización, emitiéndose la suma de las señales de salida del miembro de limitación (22) , del miembro de amortiguación (23) y del miembro de estabilización (24) como momento de torsión de motor teórico (TRA) al controlador de motor (25) .
2. Procedimiento de regulación de acuerdo con la reivindicación 1, caracterizado porque
- en el miembro de limitación (22) está almacenado un valor límite inferior (min) para el momento de torsión de motor teórico (TRA) cuyo valor es menor que el valor límite superior (max) y -para un caso C en el que el valor predeterminado (TRM) no alcanza el valor límite inferior (min) , el miembro de limitación (22) emite el valor límite inferior (min) como momento de torsión de motor teórico (TRA) al controlador de motor (25) y -para un caso D en el que el valor predeterminado (TRM) no alcanza el valor límite inferior (min) y no supera el valor límite superior (max) , el miembro de delimitación (22) emite el valor predeterminado (TRM) como momento de torsión de motor teórico (TRA) al controlador de motor (25) .
3. Procedimiento de regulación de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el valor límite superior (max) y/o el valor límite inferior (min) dependen de la magnitud de control (TTS) introducida.
4. Procedimiento de regulación de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el valor límite superior (max) y/o el valor límite inferior (min) dependen de la velocidad de automóvil (v) .
5. Procedimiento de regulación de acuerdo con una de las reivindicaciones anteriores, caracterizado porque una función de seguridad (27) efectúa un cálculo redundante de las señales de salida del miembro de limitación (22) , del miembro de amortiguación (23) y del miembro de estabilización (24) .
6. Procedimiento de regulación de acuerdo con la reivindicación 5, caracterizado porque la función de seguridad
(27) no calcula la operación de cálculo del controlador (20) completamente.
Patentes similares o relacionadas:
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]
Accionamiento de husillo, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Husillo roscado con una parte de accionamiento , que presenta un eje longitudinal (A) y está alojada a través de un primer cojinete , […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
Dispositivo para generar una fuerza auxiliar en un sistema de dirección de un automóvil, del 23 de Octubre de 2019, de THYSSENKRUPP PRESTA AG: Dispositivo para aplicar una fuerza auxiliar en un sistema de dirección de automóvil, que comprende un tornillo helicoidal de accionamiento conectable […]