Controlador reseteado de deslizamiento de ruedas para sistemas de frenado.
La presente invención se refiere a un controlador reseteado de deslizamiento para sistemas de frenado de vehículos que proporciona una serial (u) que es transmitida a través de la red de comunicaciones a un actuador local que proporciona una señal (u),
a partir de; una señal que es elaborada por un módulo supervisor y una señal que es elaborada por un módulo estimador de deslizamiento, y donde un módulo estimador de deslizamiento elabora una señal a partir de una señal que es proporcionada por un módulo de información sensorial y una señal que es elaborada por un módulo de estimación de velocidad, a partir de medidas sensoriales proporcionadas por un módulo de información sensorial. La invención se refiere también a un método para el diseño de un controlador reseteado de deslizamiento para sistemas de frenado de vehículos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201400003.
Solicitante: UNIVERSIDAD DE VIGO.
Nacionalidad solicitante: España.
Inventor/es: DELGADO ROMERO,María Emma, DÍAZ-CACHO MEDINA,Miguel Ramón, BARREIRO BLAS,Antonio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60T8/176 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Regulación de los frenos especialmente adaptada para prevención de un derrapaje excesivo de la rueda durante la deceleración, p.ej. ABS (B60T 8/1755 tiene prioridad).
- G05B11/36 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 11/00 Controladores automáticos (G05B 13/00 tiene prioridad). › con las disposiciones necesarias para obtener características especiales, p. ej. proporcionales, integrales, diferenciales.
Fragmento de la descripción:
Controlador reseteado de deslizamiento de ruedas para sistemas de frenado Sector de la técnica
La-presente invención se inscribe en el campo de los sistemas de control, más concretamente en el de los controladores de sistemas de frenado de vehículos a tracción motor, en particular describe un controlador reseteado de deslizamiento de ruedas para sistemas de frenado.
Antecedentes de la invención - Estado de la técnica
La mayoría de los sistemas de frenado disponibles en el mercado son los sistemas ABS (Antilock Braking System) convencionales, con actuadores hidráulicos (válvulas hidráulicas). Este sistema tiene como objetivo principal evitar el bloqueo de las ruedas en caso de frenado de emergencia, y así, mantener la capacidad de manejar la dirección del vehículo además de disminuir la distancia de frenado, ya que el máximo de fricción entre el neumático y la carretera se alcanza con la rueda en rotación, no bloqueada. La estrategia de control en este caso se basa en medidas de la velocidad angular de las ruedas, y regula de forma indirecta el deslizamiento controlando su aceleración/deceleración.
Para mejorar la flexibilidad, precisión y funcionalidad, los sistemas de frenado de última generación incorporan tecnología electromecánica, que a diferencia de los sistemas convencionales, permite generar y variar de forma continua fuerzas de frenado independientes para las cuatro ruedas. Con los actuadores electromecánicos, la acción del conductor en el pedal de freno se convierte en señales eléctricas que se transmiten vía microcontroladores a los actuadores de freno. Por tanto, no hay conexión hidráulica entre el pedal y los actuadores, y permite un ajuste continuo y más preciso en la fuerza de frenado. Además, permiten el control directo del deslizamiento en cada rueda mejorando las prestaciones del sistema de frenado y las características de conducción del vehículo, incidiendo en distintos módulos de control de alto nivel tales como el sistema de frenado ABS (antilock braking Systems), el control de tracción TC (traction control), el control de estabilidad del vehículo VSC ( vehicle stability control), el protocolo de estabilidad electrónica ESP (electronic stability protocol), sistemas de seguridad activos y sistemas avanzados de asistencia al conductor (ADAS).
Es en este contexto en el que se inician los trabajos relacionados con los controladores de deslizamiento de alto rendimiento cuyo objetivo es mantener, de forma suave e independiente, un cierto grado de deslizamiento en cada rueda para maximizar la adherencia entre ei neumático y el firme en distintas condiciones, evitando simultáneamente su bloqueo.
Investigaciones recientes en este campo estudian el diseño de controladores de deslizamiento basadas en control adaptativo, ganancia variable, modos deslizantes, control borroso y compensadores múltiples con acciones proporcional, integral y derivativa (PID's múltiples), entre otras. En general, utilizan varios compensadores para conseguir los objetivos impuestos, lo que dificulta el diseño y la versatilidad. Los distintos compensadores entran en funcionamiento según la velocidad, según el rango de valores del deslizamiento o según las
condiciones del firme. Además, se expone la necesidad de reajustes y mejoras, debido fundamentalmente a las sobreoscilaciones que se presentan en el transitorio con el consiguiente aumento en el tiempo en el que la salida del sistema alcanza el valor de referencia, que se traduce en una mayor distancia de frenado, una actuación brusca, e incluso 5 en situaciones extremas, una pérdida de control del vehículo en situaciones cambiantes del firme o retardo en las comunicaciones entre sensores, controladores y actuadores.
El concepto de controladores reseteados fue planteado originalmente en trabajos aislados que no tuvieron mucha repercusión, realizados por Clegg (integrador de Clegg) en los años 50 y por Horowitz (elemento reseteado de primer orden o FORE) en los años 70. Se caracterizan 10 por tener elementos no-lineales que pueden aportar mejoras en cuanto a eficacia y rapidez de corrección en la señal de salida. Basan su funcionamiento en la puesta a cero o reset de la salida del controlador, o de la salida de uno de los elementos del controlador, en los instantes de tiempo en los que la señal de entrada al controlador es cero.
En estos trabajos pioneros ya se destacaba el potencial interés de los controladores reseteados 15 como medios para superar limitaciones fundamentales que afectan a numerosas aplicaciones de control automático. No obstante, debido a la falta de desarrollo de las técnicas de estabilidad no lineal que garantizasen la robustez de aquellas propuestas, las ideas fueron abandonadas por varias décadas.
Recientemente, asociado al auge actual de las técnicas de control híbrido, el control basado en 20 reseteo ha recibido un nuevo impulso, apoyado por una metodología ya madura para análisis, diseño y validación de tales controladores. Una propuesta de especial interés práctico es la del compensador Pl+CI, que combina las ventajas de un compensador estándar como es el proporcional-integral (Pl) con la acción complementaria de un integrador de Clegg (Cl).
Hay tres enfoques principales en el diseño de compensadores reseteados. El primero es el 25 basado en el cruce por cero de la señal de error de seguimiento. El segundo es el basado en verificación de condiciones (pertenencia a un sector cónico) por parte de dicha señal de error. El tercero se basa en aplicar reseteo usando criterios puramente temporales (en instantes ` especificados). Hay cierta similitud entre los dos primeros enfoques, que son más fieles a las ideas originales de Horowitz y buscan una superación de limitaciones del rendimiento.
Dentro de los compensadores basados en cruce por cero de la señal de error de seguimiento, hay distintas estrategias que buscan optimizar las prestaciones. Para mejorar el estacionario, se puede proponer que, en lugar de resetear el estado del compensador al valor 0, se resetee a un porcentaje no nulo (por ejemplo al 20% del valor anterior). Para mejorar el transitorio y la rapidez de reacción se pueden adoptar estrategias anticipativas, es decir, aplicadas antes de 35 que el error cruce por cero (mediante una banda o margen, o mediante anticipación temporal).
Descripción de la invención
A partir de lo descrito anteriormente, es un objetivo de la presente invención proporcionar un controlador de deslizamiento de ruedas, versátil y de diseño simple, que simultáneamente 40 presente unas prestaciones mejoradas, es decir, que disminuya la distancia de frenado en distintas condiciones del firme manteniendo en la medida de lo posible unas características
adecuadas de conducción del vehículo, y que sea robusto ante las limitaciones tecnológicas tales como ruido de medida en los sensores, saturación de los actuadores y retardo en las comunicaciones.
Este objetivo se consigue de acuerdo con la reivindicación 1, con un controlador reseteado de deslizamiento que permite superar los trade-offs u objetivos comprometidos: con los controladores convencionales si se quiere una respuesta de frenado rápida, el sistema resulta frágil y sensible a incertidumbres; y si se quiere un sistema robusto, ello exige acciones de frenado más lentas. La propuesta que se plantea consigue, simultáneamente y en la medida de lo posible, mejorar tanto la rapidez de frenado como la robustez frente a condiciones imprevistas. Además, para simplificar el diseño, la invención proporciona un método para el diseño de un controlador reseteado de deslizamiento de rueda y de un estimador del máximo de fricción que caracteriza a cada tipo o condiciones del firme.
Otras áreas de aplicabilidad de la presente invención resultarán evidentes a partir de la descripción detallada proporcionada en lo sucesivo. Se debe entender que la descripción detallada y los ejemplos específicos, aunque indican la realización preferida de la invención, se proporcionan con fines de ilustración solamente y no están destinados a limitar el alcance de la invención.
Las investigaciones recientes en el campo de control de deslizamiento de ruedas revelan que se trata de un problema de gran dificultad y sometido a limitaciones muy restrictivas, cuya solución eficiente podrá verse favorecida por la aplicación de controladores reseteados.
En concreto y de forma más precisa, el problema de control del deslizamiento (A.), entre neumático y suelo, de una rueda, puede modelarse, en escalas de tiempo rápidas, como una ecuación diferencial de primer orden, controlada o regulada por la actuación o par de frenado (Tb). Es decir, se tiene una ecuación diferencial:
dX(t)/dt = F( A<t),...
Reivindicaciones:
1. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado de vehículos que proporciona una señal (u) que es transmitida a través de la red de comunicaciones a un actuador local (11), caracterizado por proporcionar una señal (u), a partir
2* i
de; una señal ( *) que es elaborada por un módulo supervisor (13) y una señal ( *) que es elaborada por un módulo estimador de deslizamiento (14), y donde un módulo estimador de
deslizamiento (14) elabora una señal ( x) a partir de una señal (cd) que es proporcionada por un módulo de información sensorial (16) y una señal (v) que es elaborada por un módulo de estimación de velocidad (15), a partir de medidas sensoriales proporcionadas por un módulo de información sensorial (16).
2. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado de vehículos que proporciona una señal (u) que es transmitida a través de la red de comunicaciones a un actuador local (ll)según reivindicación 1, caracterizado por proporcionar
una señal (u), a partir de; una señal ( *) que es elaborada por un módulo supervisor (13), una
señal (^) que es elaborada por un módulo estimador de deslizamiento (14), y además una señal (v) que es elaborada por un módulo de estimación de velocidad (15).
3. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado de
vehículos que proporciona una señal (u) que es transmitida a través de la red de
comunicaciones a un actuador local (11), según reivindicación 1, caracterizado por
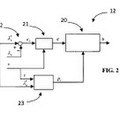
comprender un compensador reseteado (20), un comparador (22) y un módulo de decisión del porcentaje de reset (23), en donde a la entrada del compensador de reseteado (20) se reciben;
la señal (e*) de error de deslizamiento, que proviene del comparador (22), donde se realiza la
substracción de la señal de consigna ( *) de deslizamiento óptimo y el deslizamiento ( *) actual de la rueda; y una segunda señal (pr) que es el porcentaje de reset, en tanto por uno, que se aplica en el compensador reseteado (20), obtenido en el módulo de decisión del
porcentaje de reset (23) a partir de la señal de consigna ('**) de deslizamiento óptimo actual.
4. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado de
vehículos que proporciona una señal (u) que es transmitida a través de la red de
comunicaciones a un actuador local (11), según reivindicación 2, caracterizado por
comprender un compensador reseteado (20), un multiplicador (21), un comparador (22) y un módulo de decisión del porcentaje de reset (23), en donde a la entrada del compensador de reseteado (20) se reciben; una señal de error (e), que resulta del producto realizado, mediante
el multiplicador (21), de la señal (v) de velocidad del vehículo, con la señal (e) de error de deslizamiento, que proviene del comparador (22), donde se realiza la substracción de la señal
de consigna ( *) de deslizamiento óptimo y el deslizamiento ( *) actual de la rueda; y una segunda señal (pr) que es el porcentaje de reset, en tanto por uno, que se aplica en el compensador reseteado (20), obtenido en el módulo de decisión del porcentaje de reset (23) a
partir de la señal de consigna ( *) de deslizamiento óptimo actual y la velocidad (v) en el instante inicial.
5. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado de vehículos que proporciona una señal (u) que es transmitida a través de la red de comunicaciones a un actuador local (11) según reivindicaciones 1-4, caracterizado por comprender un compensador reseteado (20) de tipo Pl (proporcional integral) + Cl (integrador
de Clegg).
6. Controlador reseteado de deslizamiento de ai menos una rueda para sistemas de frenado de
vehículos que proporciona una señal (u) que es transmitida a través de la red de
comunicaciones a un actuador local (11), según reivindicaciones 1-4, caracterizado por comprender un compensador reseteado (20) de tipo P(proporcionái) + Cl (integrador de
Clegg).
7. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado de
vehículos que proporciona una señal (u) que es transmitida a través de la red de
comunicaciones a un actuador local (11), según reivindicaciones 1-4, caracterizado por comprender un compensador reseteado (20) con un porcentaje de reset pr variable.
8. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado de
vehículos que proporciona una señal (u) que es transmitida a través de la red de
comunicaciones a un actuador local (11), según reivindicaciones 1-7, caracterizado por comprender un compensador reseteado (20) que incorpora además un término derivativo.
9. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado de
20 vehículos que proporciona una señal (u) que es transmitida a través de la red de
comunicaciones a un actuador local (11), según reivindicaciones 1-8 caracterizado por el hecho de que su término integral se pondrá a cero o a un porcentaje no nulo del valor anterior.
10. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado
de vehículos que proporciona una señal (u) que es transmitida a través de la red de
comunicaciones a un actuador local (11), según reivindicaciones 1-9, caracterizado por el
hecho de que la condición de reseteo está basada en el cruce por cero de la señal de entrada (
e*) ó (e).
11. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado
de vehículos que proporciona una señal (u) que es transmitida a través de la red de
comunicaciones a un actuador local (11), según reivindicaciones 1-9, caracterizado por el
hecho de que la condición de reseteo está basada en el cruce por una banda en torno a cero (
-5<e(t)<+8, siendo 8 un valor pequeño) de la señal de entrada (e*) ó (e).
12. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado
de vehículos que proporciona una señal (u) que es transmitida a través de la red de
comunicaciones a un actuador local (11), según reivindicaciones 1-9, caracterizado por el
hecho de que la condición de reseteo está basada en pertenencia a un sector cónico de la
señal de entrada (ex) ó (e).
13. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado de vehículos que proporciona una señal (u) que es transmitida a través de la red de comunicaciones a un actuador local (11), según reivindicaciones 1-9, caracterizado por el hecho de que la condición de reseteo está basada en criterios estrictamente temporales.
14. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado de vehículos que proporciona una señal (u) que es transmitida a través de la red de comunicaciones a un actuador local (11), según reivindicaciones 1-13, caracterizado por el hecho que el término integral de la señal (u) es cero.
15. Controlador reseteado de deslizamiento de al menos una rueda para sistemas de frenado de vehículos que proporciona una señal (u) que es transmitida a través de la red de comunicaciones a un actuador local (11), según reivindicaciones 1-13, caracterizado por el hecho que el término integral de la señal (u) es un porcentaje no nulo del valor anterior del término integral.
16. Método para el diseño de un controlador resetado de deslizamiento de al menos una rueda para sistemas de frenado de vehículos que proporciona una señal (u), que comprende las siguientes etapas;
1). modelado
2). definición de una estructura básica de control
3) establecimiento de los objetivos de control
4). cálculo de parámetros: del controlador reseteado de deslizamiento.
17. Método para el diseño de un controlador resetado de deslizamiento de al menos rueda para sistemas de frenado de vehículos que proporciona una señal (u), según reivindicación 16, caracterizado por el hecho que en la etapa 1) el modelado se elabora a partir de; un modelo dinámico que calcula el deslizamiento a partir del par de frenado y un modelo de interacción neumático-firme.
18. Método para el diseño de un controlador resetado de deslizamiento de al menos rueda para sistemas de frenado de vehículos que proporciona una señal (u), según reivindicación 17, caracterizado por el hecho que en la etapa 1) comprende además un elemento de retardo
19. Método para el diseño de un controlador resetado de deslizamiento de al menos rueda para sistemas de frenado de vehículos que proporciona una señal (u), según reivindicaciones 17-18, caracterizado por el hecho que en la etapa 1) comprende además un elemento de saturación
20. Método para el diseño de un controlador resetado de deslizamiento de al menos rueda para sistemas de frenado de vehículos que proporciona una señal (u), según reivindicaciones 16-17, caracterizado por el hecho que en la etapa 1) el modelo de la interacción neumático- firme comprende un modelo de curvas de fricción indicativas de las características del firme.
21. Método para el diseño de un controlador reseteado de deslizamiento de al menos rueda para sistemas de frenado de vehículos que proporciona una señal (u), según reivindicación 20,
caracterizado por el hecho que en la etapa 1) la fuerza de fricción neumático-suelo se modela a partir de la expresión con coeficientes constantes de Pacejka.
22. Método para el diseño de un controlador reseteado de deslizamiento de al menos rueda para sistemas de frenado de vehículos que proporciona una señal (u), según reivindicación 21, caracterizado por el hecho que en la etapa 1) la fuerza de fricción neumático-suelo se modela para movimiento longitudinal según la fórmula.
fx = d(Mh)sin{c arctg[B Áx -E(B Áx -arctg(B Xx))]} = f2n(Xx, nH)
23. Método para el diseño de un controlador resetado de deslizamiento de al menos rueda para sistemaste frenado de vehículos que proporciona una señal (u), según reivindicaciones 16-22, caracterizado por el hecho que en la etapa 1) el modelo dinámico es el modelo de vehículo Ya.
24. Método para el diseño de un controlador resetado de deslizamiento de al menos rueda para sistemas de frenado de vehículos que proporciona una señal (u), según reivindicaciones 16-23, caracterizado por el hecho que en la etapa 1) el modelo dinámico es el modelo de vehículo Va para movimiento longitudinal según ecuaciones.
**(Ver fórmula)**Xx=-{-p.^ + a-Tb{t-T))
v
donde m es Va de la masa del vehículo, Tb es el par de frenado, fx la fuerza de fricción longitudinal neumático-suelo,, v la velocidad longitudinal de desplazamiento del vehículo, fz es la carga normal, /j. es la función normalizada de fricción no lineal, T es el retardo, Xx es el deslizamiento longitudinal, y se consideran los valores constantes a=r/J, p=(f2 r2)/J.
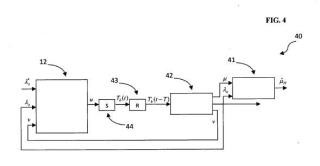
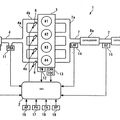
25. Método para el diseño de un controlador resetado de deslizamiento de al menos rueda para sistemas de frenado de vehículos que proporciona una señal (u), según reivindicaciones 16-24, caracterizado por el hecho que en la etapa 2) la configuración de la estructura de control es en cascada que comprende un controlador de reseteo de deslizamiento (12) , un elemento de saturación (44), un elemento de retardo (43) y un modelo Va (42), en donde el elemento de saturación (44) recibe una señal (u) de control, que proviene del controlador reseteado de deslizamiento (12), a la entrada del elemento de retardo (43) se recibe una señal Tb(t) de actuación limitada, que proviene del elemento de saturación (44), a la entrada del modelo Va (42) se recibe una señal Tb(t-T) de actuación retardada limitada, que proviene del elemento de retardo (43), en donde además la señal (u) es elaborada por el controlador (12) a
partir de la señal de consigna de deslizamiento (**), y donde el deslizamiento actual (^) y la velocidad (v) son actualizadas por el módulo de modelo 'A.
26. Método para el diseño de un controlador resetado de deslizamiento de al menos rueda para sistemas de frenado de vehículos que proporciona una señal (u), según reivindicaciones 16-25, caracterizado por el hecho que en la etapa 3) los objetivos de control comprenden;
condiciones antibloqueo, sobreoscilación, tiempo de establecimiento, robustez, elección de la consigna de deslizamiento.
27. Método para el diseño de un controlador resetado de deslizamiento de al menos rueda para sistemas de frenado de vehículos que proporciona una señal (u), según reivindicaciones
16-26, caracterizado por comprender además un módulo estimador de máxima fricción ih,
que calcula la salida a partir la señal // (valor actual de la curva de fricción no lineal) y el valor actual de deslizamiento, que provienen del modelo V* (42); la salida del estimador de /1» (41) nos dará la estimación del máximo de fricción fiH que caracteriza el tipo de firme.
28. Método para el diseño de un controlador resetado de deslizamiento de al menos rueda 10 para sistemas de frenado de vehículos que proporciona una señal (u), según reivindicación 27,
caracterizado por el hecho de utilizar un estimador basado en mínimos cuadrados recursivos.
Patentes similares o relacionadas:
 CONTROLADOR RESETEADO DE DESLIZAMIENTO DE RUEDAS PARA SISTEMAS DE FRENADO, del 9 de Julio de 2015, de UNIVERSIDAD DE VIGO: La presente invención se refiere a un controlador reseteado de deslizamiento para sistemas de frenado de vehículos que proporciona una señal (u) que es transmitida a través […]
CONTROLADOR RESETEADO DE DESLIZAMIENTO DE RUEDAS PARA SISTEMAS DE FRENADO, del 9 de Julio de 2015, de UNIVERSIDAD DE VIGO: La presente invención se refiere a un controlador reseteado de deslizamiento para sistemas de frenado de vehículos que proporciona una señal (u) que es transmitida a través […]
 COMPENSADOR PARA UN SISTEMA DE CONTROL REALIMENTADO Y PROCEDIMIENTO PARA SINTONIZAR DICHO COMPENSADOR, del 24 de Mayo de 2010, de UNIVERSIDAD DE MURCIA: Compensador para un sistema de control realimentado y procedimiento para sintonizar dicho compensador.
Comprende unos medios de compensación integral , […]
COMPENSADOR PARA UN SISTEMA DE CONTROL REALIMENTADO Y PROCEDIMIENTO PARA SINTONIZAR DICHO COMPENSADOR, del 24 de Mayo de 2010, de UNIVERSIDAD DE MURCIA: Compensador para un sistema de control realimentado y procedimiento para sintonizar dicho compensador.
Comprende unos medios de compensación integral , […]
FILTRO Y METODO PARA LA COMPENSACION DEL DESFASE INTRODUCIDO POR LA LIMITACION DE PENDIENTE DE UN ACTUADOR., del 16 de Mayo de 2005, de UNIVERSIDAD DE SEVILLA: Filtro y método para la compensación del desfase introducido por la limitación de pendiente de un actuador. La presente invención, se refiere […]
Procedimiento y dispositivo para la compensación de fase en el sistema de control de un vehículo de motor., del 16 de Septiembre de 2002, de SAAB AKTIEBOLAG: Un sistema de control de un vehículo para proporcionar una señal de salida (y) que tiene un derivado temporal que está limitado en relación con un derivado temporal de una señal […]
UNIDAD DIGITAL DE CONTROL PARA PROCESOS DEFINIDOS POR SEÑALES DE VARIACION LENTA, del 16 de Noviembre de 1985, de CONSEJO SUPERIOR INVESTIGACIONES CIENTIFICAS: UNIDAD DE CONTROL DE VARIABLES DE VARIACION LENTA REGULADA ALREDEDOR DE UN PUNTO CONSIGNA. CONSISTE EN: UN MODULO DETECTOR DE ERRORES CONSTITUIDO POR TRES BUFFER […]
 MAQUINA Y METODO PARA APLICAR UNA BANDA DE RODADURA A UNA CARCASA DE NEUMATICO, del 9 de Junio de 2009, de BRIDGESTONE CORPORATION: Una máquina para aplicar una banda de rodadura a una carcasa de un neumático ; comprendiendo la máquina : un tambor rotatorio que soporta la carcasa […]
MAQUINA Y METODO PARA APLICAR UNA BANDA DE RODADURA A UNA CARCASA DE NEUMATICO, del 9 de Junio de 2009, de BRIDGESTONE CORPORATION: Una máquina para aplicar una banda de rodadura a una carcasa de un neumático ; comprendiendo la máquina : un tambor rotatorio que soporta la carcasa […]
 SISTEMA DE CALEFACCION MEDIANTE RADIADORES, del 16 de Diciembre de 2008, de JVV GRUP MONTAJES Y DESARROLLOS DE PROYECTOS ELECTRONICOS, S.L.
MARTINEZ,THIERRY M.: Sistema de calefacción mediante radiadores: Comprende una caldera , con un intercambiador por bloques de material paramagnético […]
SISTEMA DE CALEFACCION MEDIANTE RADIADORES, del 16 de Diciembre de 2008, de JVV GRUP MONTAJES Y DESARROLLOS DE PROYECTOS ELECTRONICOS, S.L.
MARTINEZ,THIERRY M.: Sistema de calefacción mediante radiadores: Comprende una caldera , con un intercambiador por bloques de material paramagnético […]
 APARATO, METODO Y UNIDAD DE CONTROL DE MOTOR, del 1 de Abril de 2008, de HONDA GIKEN KOGYO KABUSHIKI KAISHA: Un aparato de control incluyendo: medios de cálculo de desviación para calcular una desviación de una salida de un objeto controlado de un valor […]
APARATO, METODO Y UNIDAD DE CONTROL DE MOTOR, del 1 de Abril de 2008, de HONDA GIKEN KOGYO KABUSHIKI KAISHA: Un aparato de control incluyendo: medios de cálculo de desviación para calcular una desviación de una salida de un objeto controlado de un valor […]