COMPENSADOR PARA UN SISTEMA DE CONTROL REALIMENTADO Y PROCEDIMIENTO PARA SINTONIZAR DICHO COMPENSADOR.
Compensador para un sistema de control realimentado y procedimiento para sintonizar dicho compensador.
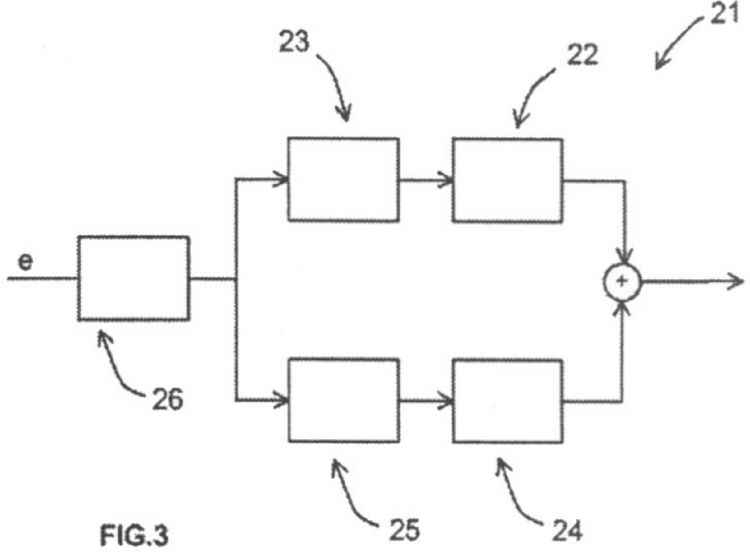
Comprende unos medios de compensación integral (21), los cuales a su vez comprenden unos primeros medios de compensación (22) y unos segundos medios de compensación (24), de manera que, cuando el valor de la señal (e) de error es cero, el valor de la salida de los medios de compensación integral, que depende del valor de la salida de los primeros medios de compensación y del valor de la salida de los segundos medios de compensación, es diferente de cero.
Se consigue un compensador con un comportamiento idéntico a un compensador PI en los instantes en los que no se realiza reset, mientras que en los instantes de reset no se pone a cero todo el término integral, sino solamente la parte correspondiente a los primeros medios de compensación, por lo que las propiedades asintóticas del compensador se mantienen intactas
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200701537.
Solicitante: UNIVERSIDAD DE MURCIA.
Nacionalidad solicitante: España.
Provincia: MURCIA.
Inventor/es: BAOS TORRICO,ALFONSO, VIDAL SANCHEZ,ANGEL, CARRASCO GOMEZ,JOAQUIN.
Fecha de Solicitud: 4 de Junio de 2007.
Fecha de Publicación: .
Fecha de Concesión: 11 de Mayo de 2010.
Clasificación Internacional de Patentes:
- G05B11/36 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 11/00 Controladores automáticos (G05B 13/00 tiene prioridad). › con las disposiciones necesarias para obtener características especiales, p. ej. proporcionales, integrales, diferenciales.
Clasificación PCT:
- G05B11/36 G05B 11/00 […] › con las disposiciones necesarias para obtener características especiales, p. ej. proporcionales, integrales, diferenciales.
Fragmento de la descripción:
Compensador para un sistema de control realimentado y procedimiento para sintonizar dicho compensador.
La presente invención se refiere a un compensador para un sistema de control realimentado, que proporciona una señal de corrección del sistema de control a partir de una señal de error de dicho sistema de control, que comprende unos medios de compensación integral. Más concretamente, se refiere a un compensador basado en acciones de puesta a cero o reset, de aplicabilidad universal en el campo de los sistemas de control realimentados.
También se refiere a un procedimiento para sintonizar un compensador para un sistema de control realimentado.
Antecedentes de la invención
Los compensadores han sido utilizados eficazmente a lo largo de la historia, entre otras cosas, como elemento de ayuda en los sistemas de control realimentado. Así, cualquier sistema de control realimentado que, en un momento dado, deba de controlar una señal de error y crear una señal de corrección para controlar la salida del sistema, encuentra en los compensadores una ayuda eficiente.
De entre los compensadores, los más simples, y por ello más utilizados, son los de comportamiento lineal e invariante en el tiempo (también llamado LIT), y de entre ellos, la combinación más utilizada en los últimos años ha sido la del tipo PI (Proporcional-Integral), cuya salida es una señal de corrección equivalente a la suma de la parte proporcional y la parte integral de la señal de error de su entrada.
El elemento P (Proporcional) mejora la corrección del error estacionario (error para tiempos de respuesta muy altos) a la salida del sistema de control. Por otro lado, el elemento I (Integral) garantiza un error estacionario prácticamente nulo a la salida del sistema.
Algunos compensadores PI han sido desarrollados también añadiendo un elemento Derivativo (D), siendo dichos compensadores conocidos como compensadores PID, los cuales mejoran las características de respuesta del compensador PI, haciéndolo ligeramente más rápido.
Sin embargo, tanto los compensadores PI como los compensadores PID sufren de las limitaciones implícitas de los sistemas lineales e invariantes en el tiempo: el compromiso entre velocidad y sobre-impulso. Es decir, un compensador PI o PID no puede ser muy rápido en su respuesta sin aumentar drásticamente su sobre-impulso a la salida del sistema de control realimentado, entendiéndose por sobre-impulso el aumento de la señal de error al cruzar cero durante cierto tiempo.
Dichos compensadores LIT, como su nombre indica, no contienen elementos no-lineales, y la adición de no-linealidades puede ser costosa en cuanto a diseño y puede desestabilizar un sistema de control realimentado bien diseñado; sin embargo, pueden aportar mejoras en cuanto a eficacia y rapidez de corrección en la señal de salida. Un ejemplo de compensador no-lineal, diseñado para superar las limitaciones de los compensadores LIT, puede ser un compensador LIT al que se le añade una no-linealidad basada en lo que se conoce como "reset control". Dichos compensadores no-lineales basan su funcionamiento en la puesta a cero de la salida del compensador, o de la salida de uno de los elementos del compensador. Dicha puesta a cero de la salida del compensador viene condicionada por el valor de la entrada del mismo (señal de error de entrada), de tal manera que en los instantes de tiempo en los que su entrada es cero, el compensador pone a cero la salida correspondiente.
Es conocida una técnica de "reset control" aplicada a compensadores de tipo PID, hallada en el artículo de [D. Wu, G. Guo, and Y. Wang, Reset Integral-Derivative control for HDD servo systems, IEEE Transactions on Control Systems Technology, 15-1-2007]; en este caso, la aplicación de un reset se realiza en los elementos Integral y Derivativo a la vez, en los instantes en que la señal de error es igual a cero. Cuando la señal deja de ser cero, instantáneamente se vuelve al estado anterior en el que se calculan todos los elementos del compensador para obtener la señal de control a la salida del mismo.
Sin embargo, se utilicen o no las técnicas de "reset control" conocidas en los compensadores, siempre se ven limitadas las prestaciones de dichos compensadores, en mayor o menor medida, debido al compromiso existente entre la velocidad de respuesta del sistema y el excesivo sobre-impulso al que se puede llegar en la salida del sistema de control realimentado en el que actúe el compensador.
Descripción de la invención
A partir de lo descrito anteriormente, es un objetivo de la presente invención proporcionar un compensador para un sistema de control realimentado, que presenta unas prestaciones mejoradas.
Este objetivo se consigue de acuerdo con la reivindicación 1, proporcionando un compensador para un sistema de control realimentado, en el que los medios de compensación integral comprenden unos primeros medios de compensación y unos segundos medios de compensación, de manera que, cuando el valor de la señal de error es cero, el valor de la salida de los medios de compensación integral, que depende del valor de la salida de los primeros medios de compensación y del valor de la salida de los segundos medios de compensación, es diferente de cero.
De este modo, con la incorporación de los primeros medios de compensación y los segundos medios de compensación en los medios de compensación integral se obtiene un compensador con un comportamiento idéntico a un compensador PI en los instantes en los que no se realiza reset, mientras que en los instantes de reset no se pone a cero todo el término integral, sino solamente la parte correspondiente a los primeros medios de compensación (es decir, se realiza una puesta cero parcial del término integral), por lo que las propiedades asintóticas del compensador se mantienen intactas.
Por tanto, el compensador proporciona, en su salida, una señal de corrección a partir de una señal de error del sistema de control realimentado, que mejora la rapidez del sistema de control realimentado y reduce el sobre-impulso de la salida de dicho sistema de control.
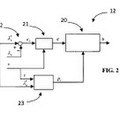
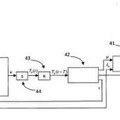
Como es conocido en el estado de la técnica, un sistema de control realimentado comprende una señal de entrada, conocida como señal de referencia o consigna; un sistema o proceso denominado planta, cuya señal de salida se quiere controlar para que alcance el mismo valor de la señal de referencia; y un compensador que modifica la señal de entrada de la planta, para alcanzar el mismo valor que la señal de referencia en la salida de la planta.
De acuerdo con una realización preferida de la invención, cuando el valor de la señal de error del sistema de control realimentado es cero, el valor de la salida de los primeros medios de compensación es cero y el valor de la salida de los segundos medios de compensación es proporcional a la integral de la señal (e).
Alternativamente, cuando el valor de la señal de error del sistema de control realimentado no es cero, el valor de la salida de los primeros medios de compensación es proporcional a la integral de la señal de error con un primer valor de proporcionalidad, y el valor de la salida de los segundos medios de compensación es proporcional a la integral del error con un segundo valor de proporcionalidad.
Así, de lo descrito se desprende que, cuando el valor de la señal de error es diferente de cero, la suma de la salida de los primeros medios de compensación y los segundos medios de compensación obtiene como resultado una salida proporcional a la integral del error, con un valor de proporcionalidad igual a la suma del valor de proporcionalidad de los primeros medios y del valor de proporcionalidad de los segundos medios. Además, cuando el valor de la señal de error es cero, la suma de los primeros medios de compensación y de los segundos medios de compensación obtiene como resultado una salida proporcional a la integral del error, con un valor de proporcionalidad igual al valor de proporcionalidad de los segundos medios.
De acuerdo con otra realización de la invención, el valor de la salida de los primeros medios de compensación se pondera con un primer valor de proporcionalidad y el valor de la salida de los segundos medios de compensación se pondera con un segundo valor de proporcionalidad. En este caso, la suma del primer valor de proporcionalidad y el segundo valor de proporcionalidad obtiene como resultado la unidad.
Así, de lo descrito, se desprende que, cuando el valor de la señal de error...
Reivindicaciones:
1. Compensador (12) para un sistema de control realimentado (10), que proporciona una señal (u) de corrección del sistema de control a partir de una señal (e) de error de dicho sistema de control (10), que comprende unos medios de compensación integral (21), caracterizado por el hecho de que los medios de compensación integral comprenden unos primeros medios de compensación (22) y unos segundos medios de compensación (24), de manera que, cuando el valor de la señal (e) de error es cero, el valor de la salida de los medios de compensación integral, que depende del valor de la salida de los primeros medios de compensación y del valor de la salida de los segundos medios de compensación, es diferente de cero.
2. Compensador según la reivindicación 1, caracterizado por el hecho de que, cuando el valor de la señal (e) de error del sistema de control realimentado (10) es cero, el valor de la salida de los primeros medios de compensación (22) es cero y el valor de la salida de los segundos medios de compensación (24) es proporcional a la integral de la señal (e).
3. Compensador según la reivindicación 1, caracterizado por el hecho de que, cuando el valor de la señal (e) de error del sistema de control realimentado (10) es diferente de cero, el valor de la salida de los primeros medios de compensación (22) es proporcional a la integral de la señal (e) con un primer valor de proporcionalidad, y el valor de la salida de los segundos medios de compensación (24) es proporcional a la integral de la señal (e) con un segundo valor de proporcionalidad.
4. Compensador según cualquiera de las reivindicaciones 1 a 3, caracterizado por el hecho de que el valor de la salida de los primeros medios de compensación (22) se pondera con un primer valor de proporcionalidad (preset) (23) y el valor de la salida de los segundos medios de compensación (24) se pondera con un segundo valor de proporcionalidad (1-preset) (25).
5. Compensador según cualquier de las reivindicaciones 1 a 4, caracterizado por el hecho de que comprende unos medios de compensación derivativa.
6. Compensador según cualquiera de las reivindicaciones 1 a 5, caracterizado por el hecho de que comprende unos medios de compensación proporcional (20).
7. Compensador según la reivindicación 6, caracterizado por el hecho de que el valor de la salida de los medios de compensación proporcional (20) se pondera con un primer valor de corrección (Kp) y el valor de la salida de los medios de compensación integral (21) se pondera con un segundo valor de corrección (Kl).
8. Compensador según cualquiera de las reivindicaciones 4 a 7, caracterizado por el hecho de que comprende medios para obtener las características internas de estado de la planta (11) y medios para calcular el primer valor de proporcionalidad (23) en función de dichas características internas de la planta.
9. Compensador según cualquiera de las reivindicaciones 1 a 8, caracterizado por el hecho de que los primeros medios de compensación (22) comprenden un integrador de Clegg (Cl).
10. Sistema de control realimentado (10), caracterizado por el hecho de que comprende un compensador (12) que proporciona una señal (u) de corrección del sistema de control (10) a partir de una señal (e) de error de dicho sistema de control, según cualquiera de las reivindicaciones 1 a 9.
11. Procedimiento para ajustar los parámetros de un compensador (12) para un sistema de control realimentado (10) según cualquiera de las reivindicaciones 1 a 9, que comprende las etapas de:
12. Procedimiento según la reivindicación 11, caracterizado por el hecho de que la etapa (b1.1) de modelizar el comportamiento de la planta (11) se realiza de acuerdo con las siguientes ecuaciones de estado:
donde xp(t) es el estado actual de la planta; d(xp(t)) es la derivada del estado de la planta; u(t) es la señal (u) de corrección de entrada de la planta; y(t) es la señal de salida de la planta y la señal de salida del sistema; xp0 es el estado inicial de la planta; y "a", "b" y "c" son constantes.
13. Procedimiento según cualquiera de las reivindicaciones 11 ó 12, caracterizado por el hecho de que la etapa (b1.2) de obtener el primer valor de corrección (Kp) y el segundo valor de corrección (26) se realiza mediante una regla de sintonización.
14. Procedimiento según cualquiera de las reivindicaciones 12 ó 13, caracterizado por el hecho de que la etapa (b1.3) de obtener un primer valor de proporcionalidad (23) para unos primeros medios de compensación (22) del compensador (12) se realiza a partir de la siguiente fórmula:
donde a y ß se obtienen a partir de las siguientes fórmulas:
donde Kp corresponde al primer valor de corrección; Kl corresponde al segundo valor de corrección (26); y a, b, c son las constantes de la modelización de la planta (11).
Patentes similares o relacionadas:
 CONTROLADOR RESETEADO DE DESLIZAMIENTO DE RUEDAS PARA SISTEMAS DE FRENADO, del 9 de Julio de 2015, de UNIVERSIDAD DE VIGO: La presente invención se refiere a un controlador reseteado de deslizamiento para sistemas de frenado de vehículos que proporciona una señal (u) que es transmitida a través […]
CONTROLADOR RESETEADO DE DESLIZAMIENTO DE RUEDAS PARA SISTEMAS DE FRENADO, del 9 de Julio de 2015, de UNIVERSIDAD DE VIGO: La presente invención se refiere a un controlador reseteado de deslizamiento para sistemas de frenado de vehículos que proporciona una señal (u) que es transmitida a través […]
 Controlador reseteado de deslizamiento de ruedas para sistemas de frenado, del 8 de Julio de 2015, de UNIVERSIDAD DE VIGO: La presente invención se refiere a un controlador reseteado de deslizamiento para sistemas de frenado de vehículos que proporciona una serial (u) que es transmitida a través […]
Controlador reseteado de deslizamiento de ruedas para sistemas de frenado, del 8 de Julio de 2015, de UNIVERSIDAD DE VIGO: La presente invención se refiere a un controlador reseteado de deslizamiento para sistemas de frenado de vehículos que proporciona una serial (u) que es transmitida a través […]
FILTRO Y METODO PARA LA COMPENSACION DEL DESFASE INTRODUCIDO POR LA LIMITACION DE PENDIENTE DE UN ACTUADOR., del 16 de Mayo de 2005, de UNIVERSIDAD DE SEVILLA: Filtro y método para la compensación del desfase introducido por la limitación de pendiente de un actuador. La presente invención, se refiere […]
Procedimiento y dispositivo para la compensación de fase en el sistema de control de un vehículo de motor., del 16 de Septiembre de 2002, de SAAB AKTIEBOLAG: Un sistema de control de un vehículo para proporcionar una señal de salida (y) que tiene un derivado temporal que está limitado en relación con un derivado temporal de una señal […]
UNIDAD DIGITAL DE CONTROL PARA PROCESOS DEFINIDOS POR SEÑALES DE VARIACION LENTA, del 16 de Noviembre de 1985, de CONSEJO SUPERIOR INVESTIGACIONES CIENTIFICAS: UNIDAD DE CONTROL DE VARIABLES DE VARIACION LENTA REGULADA ALREDEDOR DE UN PUNTO CONSIGNA. CONSISTE EN: UN MODULO DETECTOR DE ERRORES CONSTITUIDO POR TRES BUFFER […]
 MAQUINA Y METODO PARA APLICAR UNA BANDA DE RODADURA A UNA CARCASA DE NEUMATICO, del 9 de Junio de 2009, de BRIDGESTONE CORPORATION: Una máquina para aplicar una banda de rodadura a una carcasa de un neumático ; comprendiendo la máquina : un tambor rotatorio que soporta la carcasa […]
MAQUINA Y METODO PARA APLICAR UNA BANDA DE RODADURA A UNA CARCASA DE NEUMATICO, del 9 de Junio de 2009, de BRIDGESTONE CORPORATION: Una máquina para aplicar una banda de rodadura a una carcasa de un neumático ; comprendiendo la máquina : un tambor rotatorio que soporta la carcasa […]
 SISTEMA DE CALEFACCION MEDIANTE RADIADORES, del 16 de Diciembre de 2008, de JVV GRUP MONTAJES Y DESARROLLOS DE PROYECTOS ELECTRONICOS, S.L.
MARTINEZ,THIERRY M.: Sistema de calefacción mediante radiadores: Comprende una caldera , con un intercambiador por bloques de material paramagnético […]
SISTEMA DE CALEFACCION MEDIANTE RADIADORES, del 16 de Diciembre de 2008, de JVV GRUP MONTAJES Y DESARROLLOS DE PROYECTOS ELECTRONICOS, S.L.
MARTINEZ,THIERRY M.: Sistema de calefacción mediante radiadores: Comprende una caldera , con un intercambiador por bloques de material paramagnético […]
 APARATO, METODO Y UNIDAD DE CONTROL DE MOTOR, del 1 de Abril de 2008, de HONDA GIKEN KOGYO KABUSHIKI KAISHA: Un aparato de control incluyendo: medios de cálculo de desviación para calcular una desviación de una salida de un objeto controlado de un valor […]
APARATO, METODO Y UNIDAD DE CONTROL DE MOTOR, del 1 de Abril de 2008, de HONDA GIKEN KOGYO KABUSHIKI KAISHA: Un aparato de control incluyendo: medios de cálculo de desviación para calcular una desviación de una salida de un objeto controlado de un valor […]