Vehículo para remolcar un avión.
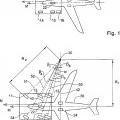
Un vehículo (10) para remolcar un avión (20) mediante la recepción sobre este de un tren de aterrizaje delantero del avión que presenta un eje longitudinal del avión (M),
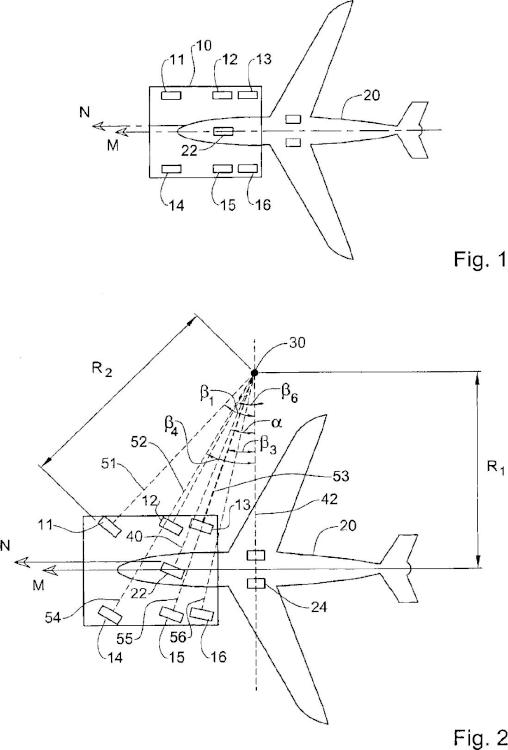
presentando dicho tren de aterrizaje delantero del avión al menos una rueda de avión delantera (22) y un primer eje de rotación (40), presentando dicho avión ruedas del tren de aterrizaje principal (24) con un segundo eje de rotación común (42) de forma que, el primer y segundo eje de rotación se crucen en un punto pivotante del avión común (30) sobre el que el avión debe girar,
presentando dicho vehículo un eje longitudinal del vehículo (N) y estando configurado para remolcar dicho avión a lo largo de una trayectoria recta o curva y que comprende un controlador para dirigir su funcionamiento, incluyendo el mantenimiento de la posición en fase del vehículo en la que dicho eje longitudinal del vehículo (N) es paralelo a dicho eje longitudinal del avión (M); donde dicho vehículo comprende una pluralidad de ruedas de vehículo (11-16), presentando cada una un eje de rotación de la rueda del vehículo (51-56); caracterizado porque el controlador se configura para calcular la ubicación del punto pivotante (30) del avión (20) de acuerdo con un ángulo de dirección (α) entre el primer y segundo eje de rotación y para controlar cada rueda de vehículo para que gire con su ángulo Ackerman (ß1-ß6), calculándose mediante el controlador de acuerdo con el ángulo de dirección (α), con respecto al segundo eje de rotación (42) de forma que todos los ejes de las ruedas del vehículo (51-56) se crucen en el punto pivotante (30), por lo cual se mantiene dicha posición en fase
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IL2011/000457.
Solicitante: ISRAEL AEROSPACE INDUSTRIES LTD..
Inventor/es: PERRY,ARIE, BRAIER,RAN, LEVY,RAPHAEL E.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64F1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64F INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU USO EN CONEXIÓN CON AERONAVES; DISEÑO, FABRICACIÓN, ENSAMBLAJE, LIMPIEZA, MANTENIMIENTO O REPARACIÓN DE AERONAVES, NO PREVISTOS EN OTRO LUGAR; MANIPULACIÓN, TRANSPORTE, ENSAYO O INSPECCIÓN DE COMPONENTES DE AERONAVES, NO PREVISTOS EN OTRO LUGAR. › Instalaciones en tierra o instalaciones en cubierta de portaaviones (adaptadas especialmente para aeronaves cautivas B64F 3/00).
PDF original: ES-2521595_T3.pdf
Fragmento de la descripción:
Vehículo para remolcar un avión CAMPO DEL OBJETO EXPUESTO EN EL PRESENTE DOCUMENTO
La presente invención hace referencia a vehículos remolcadores para aviones y, en concreto, sistemas de dirección de estos. 5
Un vehículo para remolcar un avión y un método para dirigir un avión al vehículo ring se expone en US 2008/0099600 que se considera que representa la técnica anterior más cercana.
ANTECEDENTES
En los aeropuertos modernos, la terminal se encuentra situada relativamente lejos de las pistas. Los aviones utilizan sus motores a reacción para desplazarse desde la terminal a una pista (la citada operación se 10 conoce como rodaje de salida) y para desplazarse desde una pista a la terminal (la citada operación se conoce también como rodaje de entrada) .
Estos motores a reacción son muy ruidosos, producen riesgos de seguridad, queman grandes cantidades de combustible y provocan una contaminación atmosférica significativa por la emisión de grandes cantidades de CO2. El continuo aumento de los precios del combustible y la preocupación por la contaminación acústica y de 15 los gases obligó a la industria aeroespacial a buscar medios alternativos para rodar aviones con motores apagados, lo que se denomina remolque funcional o de despacho.
Con el fin de reducir el uso de motores a reacción y, por lo tanto, ahorrar en la emisión de CO2 y combustible, se han proporcionado diferentes sistemas de remolque de aviones. Algunos se ilustran en las siguientes patentes y solicitudes de patente: patente estadounidense 6305484 de Leblanc; patente 20 estadounidense 5219033 de Pollner et al.; patente estadounidense 5314287 de Wichert; patente estadounidense 5860785 de Eberspacher; patente estadounidense 6283696 de Trummer et al.; patente estadounidense 6352130 de Klein et al.; patente estadounidense 6543790 de Johnson; patente estadounidense 6675920 de Diez et al.; publicación de solicitud de patente estadounidense de número de serie 2006/0056949 de Eckert; publicación de solicitud de patente estadounidense de número de serie 2003/095854 de Abela; publicación de solicitud de 25 patente estadounidense de número de serie 2005/196256 de Rodenkirch et al.; solicitud de patente europea 649787A1 de Michelson et al. y publicación de solicitud de patente PCT de número de serie WO/04028903A1 de Maggiori. Existe la necesidad de proporcionar un método y sistema para transferir un avión, especialmente remolcándolo y controlándolo, dirigiendo y frenando desde la cabina de mando durante el presente proceso.
SUMARIO 30
El objeto expuesto en el presente documento, en un aspecto, proporciona un vehículo para remolcar un avión mediante la recepción sobre este de un tren de aterrizaje delantero del avión que presenta un eje longitudinal del avión. El vehículo con un eje longitudinal del vehículo y que se configura para remolcar el avión a lo largo de una trayectoria recta o curva y que comprende un controlador para dirigir su funcionamiento incluyendo el hecho de mantener la posición en fase del vehículo en la que el eje longitudinal del vehículo es 35 paralelo al eje longitudinal del avión.
El avión que está configurado para ser remolcado por el vehículo está configurado para girar sobre un punto pivotante del avión que se encuentra en el eje de las ruedas de su tren de aterrizaje principal. El vehículo comprende una pluralidad de ruedas configurada cada una para circular sobre un eje de rotación. El controlador está configurado para dirigir todas las ruedas, durante el giro del vehículo, con el fin de mantener sus ejes de 40 rotación de forma que se crucen en el punto pivotante del avión.
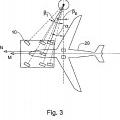
El avión está configurado para recibir de su operador una orden de dirección que tiene como resultado el giro de al menos una rueda del avión delantera del tren de aterrizaje delantero en relación con el eje longitudinal del avión. El controlador puede recibir una primera señal que indica un ángulo al que se gira la al menos una rueda de avión delantera en relación con el eje longitudinal del avión, para calcular la ubicación del punto 45 pivotante del avión, y una segunda señal que indica un ángulo entre el vehículo y los ejes longitudinales del avión. El controlador puede también dirigir el funcionamiento del vehículo de forma que el vehículo gire sobre el punto pivotante del avión, haciendo por lo tanto que dicho vehículo esté en posición en fase con el avión.
El tren de aterrizaje delantero del avión puede presentar al menos una rueda de avión delantera con un primer eje de rotación, presentando el avión ruedas del tren de aterrizaje principal con un segundo eje de 50 rotación común de forma que, el primer y segundo eje de rotación se crucen en un punto pivotante del avión común sobre el que el avión debe girar. El vehículo puede presentar una pluralidad de ruedas de vehículo, presentando cada una un eje de rotación de la rueda de vehículo. El controlador puede calcular la ubicación del punto pivotante del avión de acuerdo con un ángulo de dirección entre el primer y segundo eje de rotación y controlar cada rueda de vehículo para que gire con su ángulo Ackerman, calculándose mediante el controlador de acuerdo con el ángulo de dirección, con respecto al segundo eje de rotación de forma que todos los ejes de 5 las ruedas del vehículo se crucen en el punto pivotante, por lo cual se mantiene la posición en fase.
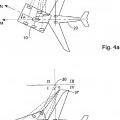
El controlador puede recibir una señal que indica una posición fuera de fase del vehículo en relación con el avión, donde existe desviación de la disposición paralela del eje longitudinal del vehículo con respecto al eje longitudinal del avión, y corregir, como respuesta a dicha señal, la desviación mediante el giro de al menos parte de las ruedas del vehículo para que el vehículo vuelva a la posición en fase. 10
El controlador puede estar configurado para hacer funcionar todas las ruedas del vehículo para que los ejes de sus ruedas se crucen en un punto intermedio que es diferente del punto pivotante y, únicamente cuando dicha desviación desaparece, girar todas las ruedas del vehículo a sus ángulos Ackerman para mantener la posición en fase del vehículo.
De acuerdo con un caso, en el que la desviación de la disposición paralela del eje longitudinal del 15 vehículo en relación con el eje longitudinal del avión es tal que el eje longitudinal del vehículo se desvía hacia el punto pivotante, ubicándose el punto intermedio más lejos del eje longitudinal del avión que el punto pivotante.
De acuerdo con otro caso, en el que la desviación de la disposición paralela del eje longitudinal del vehículo en relación con el eje longitudinal del avión es tal que el eje longitudinal del vehículo se aleja del punto pivotante y el punto intermedio se ubica más cerca del eje longitudinal del avión que el punto pivotante. 20
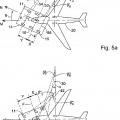
Las ruedas del vehículo pueden comprender ruedas delanteras y traseras y el controlador puede estar configurado para hacer funcionar las ruedas delanteras y que giren en una dirección desde su ángulo Ackerman y para que las ruedas traseras giren en otra dirección opuesta a su ángulo Ackerman, con el fin de virar el vehículo hasta llevarlo a la posición en fase con el avión.
De acuerdo con un caso, en el que la desviación de la disposición paralela del eje longitudinal del 25 vehículo en relación con el eje longitudinal del avión es tal que el eje longitudinal del vehículo se aleja del punto pivotante y el controlador se configura para corregir la desviación mediante el giro de las ruedas delanteras hacia el eje longitudinal del avión y mediante el giro de las ruedas traseras en dirección opuesta al eje longitudinal del avión. El giro de las ruedas delanteras hacia el eje longitudinal del avión puede proporcionarse de forma que el ángulo entre el eje de cada rueda delantera y el segundo eje de rotación sea la suma del ángulo Ackerman de 30 cada rueda y un ángulo de corrección y el giro de las ruedas traseras en dirección opuesta al eje longitudinal del avión se proporciona de forma que el ángulo entre el eje de cada rueda trasera y el segundo eje de rotación es una resta del ángulo Ackerman de cada rueda menos un ángulo de corrección que se multiplica por una parte de la base de la rueda λ, cuando λ esté asociada con la ubicación del tren de aterrizaje delantero en el vehículo y la distancia de las ruedas del vehículo desde el mismo. 35
De acuerdo con otro caso, en el que la desviación de la disposición paralela del eje longitudinal del vehículo en relación con el del avión es tal que el eje longitudinal del vehículo se desvía hacia el punto pivotante y el controlador se configura para corregir... [Seguir leyendo]
Reivindicaciones:
1. Un vehículo (10) para remolcar un avión (20) mediante la recepción sobre este de un tren de aterrizaje delantero del avión que presenta un eje longitudinal del avión (M) , presentando dicho tren de aterrizaje delantero del avión al menos una rueda de avión delantera (22) y un primer eje de rotación (40) , presentando dicho avión ruedas del tren de aterrizaje principal (24) con un segundo eje de rotación común 5 (42) de forma que, el primer y segundo eje de rotación se crucen en un punto pivotante del avión común (30) sobre el que el avión debe girar,
presentando dicho vehículo un eje longitudinal del vehículo (N) y estando configurado para remolcar dicho avión a lo largo de una trayectoria recta o curva y que comprende un controlador para dirigir su funcionamiento, incluyendo el mantenimiento de la posición en fase del vehículo en la que dicho eje 10 longitudinal del vehículo (N) es paralelo a dicho eje longitudinal del avión (M) ; donde dicho vehículo comprende una pluralidad de ruedas de vehículo (11-16) , presentando cada una un eje de rotación de la rueda del vehículo (51-56) ; caracterizado porque el controlador se configura para calcular la ubicación del punto pivotante (30) del avión (20) de acuerdo con un ángulo de dirección (α) entre el primer y segundo eje de rotación y para controlar cada rueda de vehículo para que gire con su ángulo Ackerman (β1-β6) , 15 calculándose mediante el controlador de acuerdo con el ángulo de dirección (α) , con respecto al segundo eje de rotación (42) de forma que todos los ejes de las ruedas del vehículo (51-56) se crucen en el punto pivotante (30) , por lo cual se mantiene dicha posición en fase.
2. Vehículo de acuerdo con la reivindicación 1, en el que dicho avión está configurado para girar sobre un punto pivotante del avión que se encuentra en un eje de las ruedas de su tren de aterrizaje principal; y 20 donde dicho vehículo comprende una pluralidad de ruedas configuradas cada una para circular sobre un eje de rotación, estando dicho controlador configurado para dirigir todas las ruedas, durante el giro del vehículo, con el fin de mantener sus ejes de rotación para que se crucen en dicho punto pivotante del avión.
3. Vehículo de acuerdo con la reivindicación 2, en el que el avión está configurado para recibir de su operador una orden de dirección que tiene como resultado el giro de al menos una rueda de avión delantera del tren 25 de aterrizaje delantero en relación con el eje longitudinal del avión, y en el que dicho controlador está configurado para recibir una primera señal que indica un ángulo al que se gira dicha al menos una rueda de avión delantera en relación con dicho eje longitudinal del avión, para calcular la ubicación del punto pivotante del avión, y una segunda señal que indica un ángulo entre los ejes longitudinales del avión y el vehículo y dicho controlador está configurado para dirigir el funcionamiento del vehículo de forma que el 30 vehículo gire sobre el punto pivotante del avión, haciendo por lo tanto que dicho vehículo esté en posición en fase con el avión.
4. Vehículo de acuerdo con la reivindicación 1, en el que dicho controlador está configurado para recibir una señal que indica una posición fuera de fase del vehículo en relación con el avión, en el que existe desviación de la disposición paralela del eje longitudinal del vehículo con respecto al eje longitudinal del 35 avión, y corregir, como respuesta a dicha señal, la desviación mediante el giro de al menos parte de las ruedas del vehículo para que el vehículo vuelva a dicha posición en fase.
5. Vehículo de acuerdo con la reivindicación 4, en el que el controlador está configurado para hacer funcionar todas las ruedas del vehículo de forma que los ejes de sus ruedas se crucen en un punto intermedio que es diferente del punto pivotante y, únicamente cuando dicha desviación desaparece, y para girar todas las 40 ruedas del vehículo a sus ángulos Ackerman para mantener la posición en fase del vehículo.
6. Vehículo de acuerdo con la reivindicación 5, en el que cuando la desviación de la disposición paralela del eje longitudinal del vehículo en relación con el eje longitudinal del avión es tal que el eje longitudinal del vehículo se desvía hacia el punto pivotante, punto intermedio que se ubica más lejos del eje longitudinal del avión que el punto pivotante. 45
7. Vehículo de acuerdo con la reivindicación 5, en el que cuando la desviación de la disposición paralela del eje longitudinal del vehículo en relación con el eje longitudinal del avión es tal que el eje longitudinal del vehículo se aleja del punto pivotante, el punto intermedio se ubica más cerca del eje longitudinal del avión que el punto pivotante.
8. Un método para dirigir el funcionamiento de un vehículo (10) configurado para remolcar un avión (20) 50 mediante la recepción sobre este de un tren de aterrizaje delantero del avión que presenta un eje longitudinal del avión (M) , presentando dicho tren de aterrizaje delantero del avión (20) al menos una rueda de avión delantera (22) y un primer eje de rotación (40) , presentando dicho avión ruedas del tren de aterrizaje principal (24) con un segundo eje de rotación común (42) de forma que el primer y segundo eje de rotación se crucen en un punto pivotante del avión común (30) sobre el que el avión debe girar, 55
presentado dicho vehículo un eje longitudinal del vehículo (N) y estando configurado para remolcar dicho avión a lo largo de una trayectoria recta o curva y que comprende un controlador, comprendiendo dicho método las etapas de: dirigir el funcionamiento del vehículo y mantener la posición en fase del vehículo en la que dicho eje longitudinal del vehículo es paralelo a dicho eje longitudinal del avión; en el que dicho vehículo comprende una pluralidad de ruedas de vehículo, presentando cada una un eje de rotación de rueda de vehículo; estando caracterizado dicho método por comprender además la etapa de calcular, mediante dicho controlador, la ubicación del punto pivotante del avión de acuerdo con un ángulo de 5 dirección (α) entre el primer y segundo eje de rotación y controlar cada rueda de vehículo para que gire con su ángulo Ackerman (β1-β6) , calculándose mediante el controlador de acuerdo con el ángulo de dirección (α) , con respecto al segundo eje de rotación (42) de forma que todos los ejes de las ruedas del vehículo se crucen en el punto pivotante (30) , por lo cual se mantiene dicha posición en fase del vehículo.
9. Método de acuerdo con la reivindicación 8, en el que dicho vehículo comprende una pluralidad de ruedas 10 configuradas cada una para circular sobre un eje de rotación, comprendiendo dicho método además las etapas de:
girar el avión sobre un punto pivotante del avión que se encuentra sobre un eje de las ruedas de su tren de aterrizaje principal;
girar el vehículo y 15
dirigir, mediante dicho controlador, todas las ruedas del vehículo, durante el giro del vehículo, para mantener sus ejes de rotación de forma que se crucen en dicho punto pivotante del avión.
10. Método de acuerdo con la reivindicación 8 o 9, que comprende además las etapas de recepción, mediante dicho controlador, de una primera señal que indica un ángulo entre al menos una rueda de avión delantera del tren de aterrizaje delantero y el eje longitudinal del avión, que indica una orden de dirección del avión 20 para calcular la ubicación del punto pivotante del avión, y una segunda señal que indica un ángulo entre los ejes longitudinales del avión y el vehículo y la dirección, mediante dicho controlador, del funcionamiento del vehículo de forma que gire sobre el punto pivotante del avión, haciendo por lo tanto que dicho vehículo esté en posición en fase con el avión.
11. Método de acuerdo con la reivindicación 10, que comprende además las etapas de: 25
recepción, mediante dicho controlador, de una señal que indica una posición fuera de fase del vehículo en relación con el avión, donde existe desviación de la disposición paralela del eje longitudinal del vehículo con respecto al eje longitudinal del avión y la corrección, mediante dicho controlador, como respuesta a dicha señal, de la desviación mediante el giro de al menos parte de las ruedas del vehículo para que el vehículo vuelva a dicha posición en fase. 30
12. Método de acuerdo con la reivindicación 11, que comprende además las etapas de hacer funcionar todas las ruedas del vehículo para que giren de forma que los ejes de sus ruedas se crucen en un punto intermedio que es diferente del punto pivotante y, únicamente cuando dicha desviación desaparece, girar todas las ruedas del vehículo a sus ángulos Ackerman para mantener la posición en fase del vehículo.
13. Método de acuerdo con la reivindicación 12, en el que cuando la desviación de la disposición paralela del 35 eje longitudinal del vehículo en relación con el eje longitudinal del avión es tal que el eje longitudinal del vehículo se desvía hacia el punto pivotante, ubicándose el punto intermedio más lejos del eje longitudinal del avión que el punto pivotante.
14. Método de acuerdo con la reivindicación 12, en el que cuando la desviación de la disposición paralela del eje longitudinal del vehículo en relación con el eje longitudinal del avión es tal que el eje longitudinal del 40 vehículo se aleja del punto pivotante, ubicándose el punto intermedio más cerca del eje longitudinal del avión que el punto pivotante.
15. Sistema que incluye un avión con un eje longitudinal y un vehículo de acuerdo con cualquiera de las reivindicaciones de la 1 a 7, para remolcar el avión.
Patentes similares o relacionadas:
Procedimiento y dispositivo de identificación de un avión en conexión con el estacionamiento del avión en un puesto de estacionamiento, del 3 de Junio de 2020, de thyssenkrupp Airport Solutions, S.A: Procedimiento de identificación de un avión e indicación del tipo y versión del avión en conexión con el estacionamiento del avión en una puerta […]
Disposición de pista, del 19 de Febrero de 2020, de Runway Innovations Limited: Disposición de pista de aeropuerto para aeronaves comerciales, que comprende: una primera sección de pista ; una segunda sección […]
Procedimiento para identificar un avión en relación con el estacionamiento del avión en una plataforma, del 4 de Septiembre de 2019, de thyssenkrupp Airport Solutions, S.A: Procedimiento para identificar un avión en relación con el estacionamiento del avión en una puerta o plataforma, para la posible conexión de un puente de […]
 Optimización del alcance de un sistema de atraque de aeronaves, del 31 de Julio de 2019, de ADB Safegate Sweden AB: Un sistema de atraque de aeronaves que comprende:
un sistema de posicionamiento y verificación luminoso adaptado […]
Optimización del alcance de un sistema de atraque de aeronaves, del 31 de Julio de 2019, de ADB Safegate Sweden AB: Un sistema de atraque de aeronaves que comprende:
un sistema de posicionamiento y verificación luminoso adaptado […]
Sistema y procedimiento para estacionar y procesar aeronaves, del 24 de Julio de 2019, de RAU B.V: Un sistema para estacionar y procesar aeronaves, que comprende: - al menos un dispositivo de transporte para transportar aeronaves […]
DISPOSITIVO PARA DEFLECTAR Y DESACELERAR UN FLUJO, del 31 de Enero de 2019, de CORREA ESCOBAR, Juan Felipe: La presente invención corresponde a un dispositivo para deflectar y desacelerar un flujo que comprende una superficie deflectora, una estructura […]
Dispositivo para una plataforma para helicópteros, del 30 de Enero de 2019, de Marine Aluminium AS: Un dispositivo para una plataforma para helicópteros que comprende un piso de soporte estanco a los fluidos y una cubierta superior de drenaje […]
SISTEMA DE ATERRIZAJE AUTOMÁTICO CON ALTA VELOCIDAD DE DESCENSO PARA DRONES, del 21 de Junio de 2018, de RODARTE LEYVA, Eduardo: La presente invención describe un sistema para plataforma de aterrizaje automático de Dron a alta velocidad de descenso con sujeción magnética al contacto. Integra una […]