Remolcador de avión sin barra de remolque.
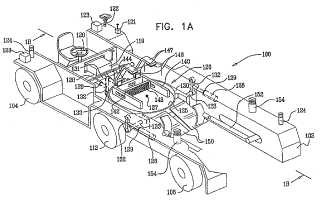
Un remolcador de avión sin barra de remolque (100) configurado para recibir untren de aterrizaje de avión (202) y para remolcarlo así,
dicho remolcador (100)comprendiendo:
* un chasis (102) configurado para recibir sobre éste al menos una parte dedicho tren de aterrizaje;
* una disposición de propulsión configurada para desplazar el remolcador (100)en una dirección a lo largo de una trayectoria;
* al menos un sensor de fuerza configurado para medir, directa o indirectamente,una fuerza ejercida por dicho chasis sobre dicho tren de aterrizaje en al menosdicha dirección debido a la velocidad diferencial entre el remolcador y el avión(202);
caracterizado porque la disposición de propulsión comprende una bomba hidráulicacon placa oscilante de ángulo variable (161) conectada a un motor hidráulico con placaoscilante de ángulo variable (163) y a una válvula de paso de desviación controlable(164), configurada para que un fluido hidráulico circule entre la bomba (161) y el motor(163) para activar dicha disposición de propulsión para aumentar al menos una o lavelocidad o la fuerza de tracción del remolq ue (100) cuando el paso de desviación(166) se encuentra en una posición cerrada, y al menos la mayoría del fluido hidráulicocircula a lo largo del motor (163) a través de la válvula de paso de derivación (164)para reducir al menos una o la velocidad de giro o la fuerza de tracción del remolcador(100) cuando el paso de desviación (166) se encuentra en una posición abierta; yelremolcador de avión sin barra de remolque (100) también comprende un controlador(119) en comunicación con dicho sensor de fuerza y estando configurado para alteraruno o más parámetros del movimiento del remolcador (100) para que la fuerza ejercidapor dicho chasis (102) sobre dicho tren de aterrizaje se mantenga por debajo de unvalor predeterminado al regular al menos la energía disponible para la disposición depropulsión, las placas oscilantes de la bomba (161) y del motor (163), y el estado de laválvula de paso de desviación (164).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IL2009/001110.
Solicitante: ISRAEL AEROSPACE INDUSTRIES LTD..
Nacionalidad solicitante: Israel.
Dirección: BEN GURION INTERNATIONAL AIRPORT 70100 LOD ISRAEL.
Inventor/es: PERRY,ARIE, BRAIER,RAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64F1/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64F INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU USO EN CONEXIÓN CON AERONAVES; DISEÑO, FABRICACIÓN, ENSAMBLAJE, LIMPIEZA, MANTENIMIENTO O REPARACIÓN DE AERONAVES, NO PREVISTOS EN OTRO LUGAR; MANIPULACIÓN, TRANSPORTE, ENSAYO O INSPECCIÓN DE COMPONENTES DE AERONAVES, NO PREVISTOS EN OTRO LUGAR. › B64F 1/00 Instalaciones en tierra o instalaciones en cubierta de portaaviones (adaptadas especialmente para aeronaves cautivas B64F 3/00). › instaladas para la manipulación ("handling") de aeronaves.
PDF original: ES-2403288_T3.pdf
Fragmento de la descripción:
REMOLCADOR DE AViÓN SIN BARRA DE REMOLQUE Descripción CAMPO DE LA INVENCiÓN [0001] La presente invención hace referencia generalmente a sistemas para el movimiento terrestre de un avión, y más en particular a métodos de control de vehículos terrestres de tales sistemas.
ANTECEDENTES DE LA INVENCiÓN [0002] Los remolques de avión suelen utilizarse para remolcar aviones entre diferentes ubicaciones en un aeropuerto, evitando así la necesidad de que el avión se mueva con su propio motor, ahorrando combustible de aviación. Los remolques pueden proporcionarse con una barra de remolque, que conecta un tren de aterrizaje con el remolque, o sin barra de remolque, en los que no se proporciona una barra de remolque, en los que, típicamente, el tren de aterrizaje se sitúa directamente sobre el chasis del remolque. Los remolques pueden tener un controlador capaz de percibir las fuerzas aplicadas sobre el tren de aterrizaje del avión y la velocidad del avión mientras se remolca. [0003] Por ejemplo, US5048625 publica un tractor con una barra de remolque capaz de percibir las fuerzas aplicadas sobre el tren de aterrizaje del avión, y de controlar la potencia y el freno del tractor basándose en dicha percepción. Con tractores de ese tipo es difícil percibir la potencia transmitida directamente. Por el contrario, de acuerdo con la referencia, se perciben la aceleración del tractor y la energía suministrada al mismo. Sobre esta base es posible calcular la fuerza transmitida y actuar en consecuencia. [0004] US5219033 publica un tractor de remolque de avión que tiene su aceleración limitada a una aceleración restrictiva predeterminada para reducir tensiones sobre el tren de aterrizaje del avión con un regulador controlado con un ordenador interpuesto entre el pedal acelerador y el motor de combustión interna. El regulador también puede controlar el aumento de velocidad del motor por debajo de su valor límite predeterminado antes de controlar el límite de aceleración. [0005] W085/00790 publica un tractor para remolcar aviones grandes y pesados a gran velocidad sujetando el tren de aterrizaje del avión. El tractor de acuerdo con la referencia tiene medios para detectar la fuerza transversal aplicada sobre el morro del tren de aterrizaje del avión y medios para mantener la fuerza transversal dentro de límites permisibles aplicando al tractor una corrección de la dirección adecuada que no puede modificarse ni por el piloto ni por el operador del tractor. [0006] DE4324211 publica un método para remolcar o empujar un vehiculo produciendo una carga, de acuerdo con la cual la fuerza producida por la carga se detecta en un punto de conexión con el vehiculo. Este punto de conexión está sujeto a la carga de tensión o de empuje, desde la que se deriva una señal de fuerza y el vehiculo se controla con una función de esta señal de fuerza. La señal de fuerza se compara, como un valor actual, con una señal de fuerza guardada como un valor deseado, yel impulso del vehiculo se controla como una función de la desviación entre el valor actual y el valor deseado. [0007] US 4913253 publica un vehiculo de remolque impulsado con motor que utiliza esencialmente tres ruedas, dos ruedas motrices paralelas independientemente controladas y una rueda de cola posterior para equilibrar que gira por completo, con un operador de vehiculo situado esencialmente entre y directamente sobre las ruedas motrices con tal de situarse inmediatamente adyacente al gancho que conecta, y teniéndolo dentro de la linea visual, para conseguir un control preciso de las ruedas motrices independientes en una dirección progresiva e inversa que permite unas maniobras muy controladas y precisas del vehiculo y del gancho tal cual desee el operador del vehiculo selectivamente. [0008] W090/11932 publica un sistema de transmisión de un dispositivo de transferencia sujetando una rueda doble, en el que el dispositivo de transferencia tiene como objetivo mover un avión u otro dispositivo con ruedas sobre una base. El dispositivo de transferencia incluye al menos dos rodillos de fricción y motores para accionarlos, es decir, uno para cada rueda motriz del dispositivo a desplazar, y dispositivos de compresión para crear la compresión que presione el rodillo de fricción contra la rueda motriz.
RESUMEN DE LA INVENCiÓN
De acuerdo con la reivindicación 1, se proporciona un remolcador de avión sin barra de remolque configurado para recibir un tren de aterrizaje de un avión y remolcarlo asi, el remolcador comprendiendo:
• un chasis configurado para recibir sobre éste al menos una parte de dicho tren de aterrizaje;
• una disposición de propulsión configurada para desplazar el remolque en una dirección a lo largo de una trayectoria y comprendiendo una bomba hidráulica con placa oscilante de ángulo variable conectada a un motor hidráulico con placa oscilante de ángulo variable y a una válvula de paso de desviación
controlable, configurado para que un fluido hidráulico circule entre la bomba y el motor asi como para activar dicha disposición de propulsión para aumentar al menos la velocidad o la fuerza de tracción del remolque cuando el paso de desviación se encuentra en posición cerrada, y al menos la mayoria del fluido hidráulico circula a lo largo del motor a través de la válvula de paso de desviación para reducir al menos la velocidad de giro o la fuerza de tracción del remolcador cuando el paso de desviación se encuentra en una posición abierta;
• al menos un sensor de fuerza configurado para medir, directa o indirectamente, una fuerza ejercida por el chasis sobre el tren de aterrizaje en al menos una dirección debido a la velocidad diferencial entre el remolcador y el avión (202) ;
• un controlador en comunicación con el sensor de fuerza y estando configurado para alterar uno o más parámetros del movimiento del remolcador para que la fuerza ejercida por dicho chasis sobre dicho tren de aterrizaje se mantenga (por ejemplo, durante el movimiento del remolcador) por debajo de un valor predeterminado al regular al menos la energia disponible para la disposición de propulsión, la bomba y las placas oscilantes del motor y el estado de la válvula de paso de derivación.
Se apreciará que la expresión "sin barra de remolque" tal y como se utiliza aqui en la especificación y reivindicaciones hace referencia a una clase de remolques de avión sin una barra de remolque (es decir, una barra u otro tipo de dispositivo conector que une el chasis de un remolque y el tren de aterrizaje del avión) . En un remolcador de avión sin barra de remolque, el tren de aterrizaje tipicamente se sitúa directamente sobre el chasis, o se dirige su peso hacia un área dentro del chasis: [0011] También se apreciará que el término "controlador" como se utiliza aqui en la especificación y reivindicaciones debe entenderse en su expresión más general, incluyendo, pero no limitándose a, dos o más controladores, por ejemplo cada uno realizando una función especifica. [0012] El remolcador de avión sin barra comprendiendo además una válvula de cruz del motor hidráulico para permitir un flujo libre del fluido hidráulico a través del motor, para el movimiento libre del remolque, cuando el paso de desviación está cerrado. [0013] El paso de desviación puede estar asociado al periodo de frenado que sigue a la apertura del paso de desviación en el que el fluido hidráulico se desvia desde la bomba de placa oscilante, estando configurado el controlador también para controlar el estado del paso de desviación, la válvula estando caracterizada por un periodo de respuesta mucho menor al periodo de frenado. [0014] El módulo de accionamiento de propulsión también puede comprender una válvula que controla el estado del paso de desviación, la válvula estando caracterizada por un periodo de respuesta que es mucho menor al periodo de resonancia de las placas oscilantes de la bomba hidráulica y el motor.
Puede configurarse el controlador para regular el desplazamiento del motor
hidráulico. [0016] Puede configurarse el controlador para regular un ángulo de control de la bomba de placa oscilante. De este modo, puede controlar la velocidad del remolcador y por lo tanto la fuerza aplicada sobre el tren de aterrizaje del avión. [0017] Puede configurarse el controlador para inducir cambios rápidos en el ángulo de control de la bomba de placa oscilante. Esto le permite impedir que la fuerza aplicada sobre el tren de aterrizaje del avión exceda el umbral de fuerza.
Puede configurarse el controlador para inducir cambios lentos en el ángulo de control de la bomba de placa oscilante. Por ejemplo, esto puede ser útil para alcanzar la velocidad deseada con el remolcador de avión sin barra. [0019] El controlador puede estar... [Seguir leyendo]
Reivindicaciones:
1. Un remolcador de avión sin barra de remolque (100) configurado para recibir un tren de aterrizaje de avión (202) y para remolcarlo así, dicho remolcador (100) comprendiendo:
• un chasis (102) configurado para recibir sobre éste al menos una parte de dicho tren de aterrizaje;
• una disposición de propulsión configurada para desplazar el remolcador (100) en una dirección a lo largo de una trayectoria;
• al menos un sensor de fuerza configurado para medir, directa o indirectamente, una fuerza ejercida por dicho chasis sobre dicho tren de aterrizaje en al menos dicha dirección debido a la velocidad diferencial entre el remolcador y el avión (202) ;
caracterizado porque la disposición de propulsión comprende una bomba hidráulica con placa oscilante de ángulo variable (161) conectada a un motor hidráulico con placa oscilante de ángulo variable (163) y a una válvula de paso de desviación controlable (164) , configurada para que un fluido hidráulico circule entre la bomba (161) y el motor
(163) para activar dicha disposición de propulsión para aumentar al menos una o la velocidad o la fuerza de tracción del remolq ue (100) cuando el paso de desviación (166) se encuentra en una posición cerrada, y al menos la mayoría del fluido hidráulico circula a lo largo del motor (163) a través de la válvula de paso de derivación (164) para reducir al menos una o la velocidad de giro o la fuerza de tracción del remolcador
(100) cuando el paso de desviación (166) se encuentra en una posición abierta; yel remolcador de avión sin barra de remolque (100) también comprende un controlador
(119) en comunicación con dicho sensor de fuerza y estando configurado para alterar uno o más parámetros del movimiento del remolcador (100) para que la fuerza ejercida por dicho chasis (102) sobre dicho tren de aterrizaje se mantenga por debajo de un valor predeterminado al regular al menos la energía disponible para la disposición de propulsión, las placas oscilantes de la bomba (161) y del motor (163) , y el estado de la válvula de paso de desviación (164) .
2. El remolcador de avión sin barra de remolque de acuerdo con la reivindicación 1, comprendiendo además una válvula en cruz del motor hidráulico para permitir un flujo libre del fluido hidráulico a través del motor, para el movimiento libre de remolque, cuando el paso de desviación está cerrado.
3. El remolcador de avión sin barra de remolque de acuerdo con cualquiera de las reivindicaciones 1 y 2, en el que el paso de desviación (166) está asociado a un
periodo de frenado seguido por la apertura del paso de desviación por el que se desvia el fluido hidráulico desde dicha bomba de placa oscilante, dicho controlador estando configurado además para controlar el estado del paso de desviación, dicha válvula (164) estando caracterizada por un periodo de respuesta mucho menor al mencionado periodo de frenado.
4. El remolcador de avión sin barra de remolque de acuerdo con cualquiera de las reivindicaciones anteriores, dicha válvula (164) estando caracterizada por un periodo de respuesta mucho menor que un periodo de resonancia de las placas oscilantes de dicha bomba y dicho motor hidráulicos.
5. El remolcador de avión sin barra de remolque de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dicho controlador está configurado para regular cualquiera o más de entre:
• el desplazamiento del motor hidráulico; y
• el ángulo de control de dicha bomba de placa oscilante.
6. El remolcador de avión sin barra de remolque de acuerdo con las reivindicaciones de la 1 a la 5, en el que dicho controlador está configurado para inducir cualquiera o más de entre los siguientes:
• cambios rápidos en un ángulo de control de dicha bomba de placa oscilante; y
• cambios lentos en un ángulo de control de dicha bomba de placa oscilante.
7. El remolcador de avión sin barra de remolque de acuerdo con la reivindicación 6, en el que dicho controlador está configurado para utilizar un proceso de alimentación previa para regular el ángulo de control de dicha bomba de placa oscilante.
8. El remolcador de avión sin barra de remolque de acuerdo con cualquiera de las reivindicaciones anteriores, en el que la alteración de dicho uno o más parámetros del movimiento provoca que el remolcador reduzca su velocidad o su fuerza de tracción.
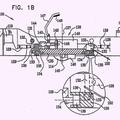
9. El remolcador de avión sin barra de remolque de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dicho chasis comprende un montaje de soporte
(125) configurado para recibir dicha parte del tren de aterrizaje y estando montado sobre dicho chasis para ser desplazable sobre él al menos en dicha dirección.
10. El remolcador de avión sin barra de remolque de acuerdo con la reivindicación 9, en el que dicho sensor de fuerza está configurado para medir la fuerza ejercida por dicho montaje de soporte sobre dicho chasis en al menos dicha dirección.
11. El remolcador de avión sin barra de remolque de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dichos parámetros del movimiento se seleccionan de un grupo que comprende velocidad, dirección, aceleración y desaceleración.
12. El remolcador de avión sin barra de remolque de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dicho controlador está configurado para calcular una fuerza resultante ejercida por dicho chasis sobre dicho tren de aterrizaje al menos basándose en uno o más factores externos.
13. El remolcador de avión sin barra de remolque de acuerdo con la reivindicación 12, en el que dichos factores externos se seleccionan de entre un grupo que comprende:
• datos relacionados con las pendientes en diversas ubicaciones a lo largo de una superficie de desplazamiento del avión atravesada por dicho remolcador,
• datos relacionados con fuerzas del viento que afectan a dicho avión y remolcador;
• datos relacionados con las fuerzas de fricción por el rodaje de dicho avión y/o remolcador en diversas ubicaciones a lo largo de dicha superficie de desplazamiento del avión; y
• datos relacionados con los obstáculos.
14. Un método para remolcar un avión (202) , el método comprendiendo el uso de un remolcador de avión sin barra de remolque (100) que comprende:
• un chasis (102) configurado para recibir sobre éste al menos una parte de un tren de aterrizaje de dicho avión (202) : y
• una disposición de propulsión configurada para desplazar el remolcador (100) en una dirección a lo largo de una trayectoria y comprendiendo una bomba hidráulica con placa oscilante de ángulo variable (161) conectada a un motor hidráulico con placa oscilante de ángulo variable (163) y a una válvula de paso de desviación controlable (164) , configurada para que un fluido hidráulico circule entre la bomba (161) y el motor (163) para activar dicha disposición de propulsión para aumentar al menos una o la velocidad o la fuerza de tracción del remolque (100) cuando el paso de desviación (166) se encuentra en posición cerrada, y al menos la mayoría del fluido hidráulico circula a lo largo del motor a través de la válvula de paso de desviación (164) para reducir al menos una o la velocidad de giro o la fuerza de tracción del remolcador (100) cuando el paso de desviación (166) se encuentra en una posición abierta;
el método incluyendo además provocar que dicho remolcador (100) remolque dicho avión (122) a la vez que se alteran uno o más parámetros del movimiento del remolcador (100) para que una fuerza ejercida por dicho chasis (102) sobre dicho tren de aterrizaje se mantenga por debajo de un valor predeterminado regulando al menos la energía disponible para la disposición de propulsión, las placas oscilantes de la bomba (161) y del motor (163) , y el estado de la válvula de paso de desviación (164) .
15. El método de acuerdo con la reivindicación 14, en el que dicho remolcador corresponde con cualquiera de las reivindicaciones de la 1 a la 13.
\
(!) •
-
L.L.
· .
o
¡;: .
L
-I J
. .
o N
• ~ .
...... .
ci
...
•
C)
1.&
. ~
•
•
' C!)
.G: .
"
•
C) .
¡:;:
•
C)
. ¡;: .
·
.
(!) ..'
-.
u.. .
...,
. N
•
-C) La...
I
,
I I
I
I
I
.1
I
,
,
,
,
•
Q
l.{)
•
~
. i.
;.
I~
. . g
LaJ _\ ll) .
•
(!)
¡:;:
IJ.
I
.!
,
I
I
. Ii tJ
I
,
o ca ..
. c)
ii: .
. '.
C) -·
u..
....
m
......
.
(!)
u..
...
~
o
ce
....
.
""'
(!)
u..
....
119
Motor diesel
Bomba de placa oscilante FIG.8A
Wdes Controlador de la
Dm
velocidad y potencia del remolcador sin barra
Dp
F tracción p hidráulico We motor Ve hi velocidad
FIG.88
ro ", '
:Q
u , !.!
~
-u.
'"
~
+
", '
o ~
'o ..
'O
'"
~
, !.!
';;'"
~
u.
O')
u.
-
+
•
'"
'O
(9 ro , ~ U
¡¡:'"
•
¡
'f
;¡
z
'o '>
<!
... ---iG1v (s}l----e' (}-----------------,
RAMA DE ALIMENTACiÓN PREVIA
IControlador
Fuerzas externas i ncl i naciones+vie nto por HLC
Entrada velocidad
+T
deseada I .. G1t (S} I
Fuerza de tracción deseada Fuerzas externas Fpiloto+Frodaje Por celda de carga
+
+
-
LAZO DE CONTROL DE FUERZA . I
L-___-IICeldas de carga de realimentación [YactIJal I I LAZO DE CONTROL DE VELOCIDAD I
Realimentación -Cuentakilómetros FIG. 10
Salida Velocidad del vehículo I Fuerza de tracción
Parámetros controlados Nd Dm Cl>p
Remolcar un avión con un remolcador de avión sin barra de remolque a la vez que se detecta, al menos con un sensor de fuerza, una fuerza aplicada al tren de aterrizaje de dicho avión al menos en una dirección generalmente horizontal y mientras se mantiene cerrada una . trayectoria de desviación; en el que la trayectoria de desviación está unida a una bomba de placa oscilante de ángulo variable y al motor hidráulico de un módulo de impulso de rueda del remolcador que está conectado a una rueda de remolcador.
2010 -.
r----. ------1-,
I A
Detectar mediante un sensor de fuerza un
I
cambio en la velocidad del avión
I
I
Aplicar un proceso de alimentación previa a1 la bomba de placa oscilante de ángulo ¡
variable
I
204 1·
I
I
I
I
I
Cambiar el ángulo de control de la bomba de I
placa oscilante de ángulo variable 1 2046 I
L__ _ I
I------~
./ \
\ El avión frena ,
, , /
.. .
r::otofrena el
avión
I
I 1 ~ 1
Detectar el frenado con el sensor de fuerza
I
I
~ ,
----. -------,
Determinar la abertura de una trayectoria de ,
desviación
--------¡--_1
Abrir, mediante un controlador de remolcador, al menos pal cialmente en respuesta a una salida de al menos un sensor de fuerza indicando un frenado de avión controlado por el piloto del avión, una trayectoria de desviación para reducir una fuerza aplicada a dicho tren de aterrizaje del avión ce mo resultado de dicho frenado del avión controlado por el piloto, en el que dural Ite un periodo de frenado que sigue a la apertura de la trayectoria de desviac ión circula al menos la mayoría del fluido hidráulico entre el motor hidráulico y la trayectoria de desviación para reducir una velocidad rotacional de la rueda del remolcador.
Cerrar la trayectoria de desviación Figura11
.
\ I \ I \ I \ I \ I \ I
\ I \ . I I \ I \ I
"
.
L.L
.
(!)
-
LL.
Q)
::l o .....
en Q) ce .....
o..
CfJ
Q)
"'O
Q)
"'O
ro
CfJ Il. ~
.....
.....
N
.....
ce 2
.....
.....
1707 1708 1709
>
? ?
. • : • . ! t j
I ! i ~ I! I . 1 3 4 6 6 7 8 9 1 1112 13 1415 16 17 18 T
Fig~16
Tiempo .., :;¡: I i ", mpo ., 11 1 I • I i 1 i I t' .._..........L.i...... :...................\........:......
. . ¡ ; j' .! ¡ ] I ..·....·......"......·~............·....1....·1... .... .. , ., t
..... ..............:.. ........·_....•........•....·t......·t.. I I I ' .............1¡ I 1 .......\.....i ., ¡ ; . ¡!' i '1 , 1,
. .. '1 1 1830 , J . i :-+~+t~-I\ooo---, ..;
. L .1 ......... 'I!. .
....··......·..·TI I
., i L!¡ I
Tiempo
¡ ; I i ':
"
...................... ...................L.....t1+-+---r--t---t--i
! I . ¡ '. . i';. I! ~ 1 1840 ¡! ; . , i 1 :!.¡ l' t
·-r..........·..··......·r....r..·..·..........·..........·l......r......·......··..!I...·..•...ll· , . ..t"·I·............·..Ti, ........~, ..................·', ·:......1
Tiempo Velocidad
...
·15K
S 10~
51<'
Freno Fuerza .O·
%5 '%4' F %3
%2
%1
RPM
· .
. 1500
R
1910
\
I
~930 , --________•.•.•.___.L.. '________---,
'-ir ~
__p_r_op_o_r_C_io_n_a_r_la_._.v_e_IO_C_id_a_d_de._'""MT.I_c_aLd_o_r_d_e_a_V_ión_S_i_n_b_a_r_ra_de_re_m_O_lq_u_e_•• __._
1940 [_._-_.__.._-
determinar la velocidad actual del remolcador de avión sin barra de remolque en respuesta a la velocidad deseada ~
1950 . I
\. r-·--:::-un avión con un remolcador de avión sin barra en respuesta a la ~ velocidad deseada
19~0
transmitir la información de velocidad y ubicación al menos a otro remolcador de
avión sin barra de remolque
1992
l transmitir la información de velocidad y ubicación a una unidad de control central
1993
recibir la información de velocidad y ubicación de la unidad de control central al menos de otro remolcador de avión sin barra de remolque detectar la velocidad y ubicación de al menos otro remolcador de avión sin barra ~
de remolque utilizando un sensor
Fig.17 1900
Patentes similares o relacionadas:
Aparato de tipo poste para contener y cargar una aeronave no tripulada de despegue y aterrizaje verticales y método para contener y cargar una aeronave no tripulada de despegue y aterrizaje verticales mediante su utilización, del 9 de Abril de 2019, de Korea Aerospace Research Institute: Un aparato para contener y cargar una aeronave VTOL no tripulada, que comprende: un poste colocado sobre un suelo; y por lo […]
Módulo de accionamiento de doble rueda, del 19 de Julio de 2017, de SIEMENS AKTIENGESELLSCHAFT: Módulo de accionamiento de doble rueda para accionar dos ruedas de vehículo dispuestas axialmente distanciadas una de la otra, que pueden girar alrededor […]
Tractor con diferentes fuentes de energía., del 15 de Febrero de 2017, de MULAG FAHRZEUGWERK Heinz Wössner GmbH & CO. KG: Módulo para la fabricación de un tractor de rampa con diferente fuente de energía, incluyendo a) un tractor con al menos un motor eléctrico para la propulsión […]
Dispositivo de manipulación para aeronave, en particular para helicóptero, del 21 de Septiembre de 2016, de DCNS: Dispositivo de manipulación para una aeronave que presente al menos una rueda de nariz, y esté situada sobre una zona de aterrizaje o de apontaje , dicho dispositivo de manipulación […]
Remolcaje de un avión con adaptador de tren de aterrizaje (procedimiento y dispositivo), del 17 de Agosto de 2016, de Quickloading GmbH: Dispositivo de acoplamiento para el acoplamiento a trenes de aterrizaje de aviones, estando realizado el dispositivo de acoplamiento con un primer […]
 Remolcador de avión sin barra de remolque, del 30 de Marzo de 2016, de ISRAEL AEROSPACE INDUSTRIES LTD.: Un remolcador de avión sin barra de remolque configurado para recibir un tren de aterrizaje de avión y para remolcarlo, mediante el mismo, a una velocidad […]
Remolcador de avión sin barra de remolque, del 30 de Marzo de 2016, de ISRAEL AEROSPACE INDUSTRIES LTD.: Un remolcador de avión sin barra de remolque configurado para recibir un tren de aterrizaje de avión y para remolcarlo, mediante el mismo, a una velocidad […]
 Barra de remolque, del 22 de Diciembre de 2015, de JMS AG: Barra de remolque para el remolque de aeronaves en su tren de aterrizaje delante, comprendiendo:
- un cuerpo de base ; - una cabeza de remolque […]
Barra de remolque, del 22 de Diciembre de 2015, de JMS AG: Barra de remolque para el remolque de aeronaves en su tren de aterrizaje delante, comprendiendo:
- un cuerpo de base ; - una cabeza de remolque […]
 Sistema para la señalización de la posición de los vehículos de remolque de las aeronaves, del 22 de Abril de 2014, de PEDREÑO GARCÍA , María Jesús: Sistema para la señalización de la posición de los vehículos de remolque de las aeronaves comerciales.
Los vehículos remolcadores de las […]
Sistema para la señalización de la posición de los vehículos de remolque de las aeronaves, del 22 de Abril de 2014, de PEDREÑO GARCÍA , María Jesús: Sistema para la señalización de la posición de los vehículos de remolque de las aeronaves comerciales.
Los vehículos remolcadores de las […]